This is Deeplearning2C. It's a project for generate an application for Android, Iphone, Linux, Windows and Mac OS X, that can generate a deep neural network in a .c file and .m file after being trained with Deeplearning4J.
I have been using mimimal dependencies and liberaries. These are the the following dependencies I have been using:
- Deeplearning4J
- GluonHQ JavaFX for Android & Iphone development
- Lombok
- Logback-classic
Let's say that you want to implement an deep neural network that are trained for classification for animals or other visible things. You want to implement it into a microcontroller such as STM32, PIC, AVR. Then this application can be used to generate a deep neural network in C code.
Here is an example when I run the IRIS example with iris.csv data file. You can download it from here:
First I create my model.
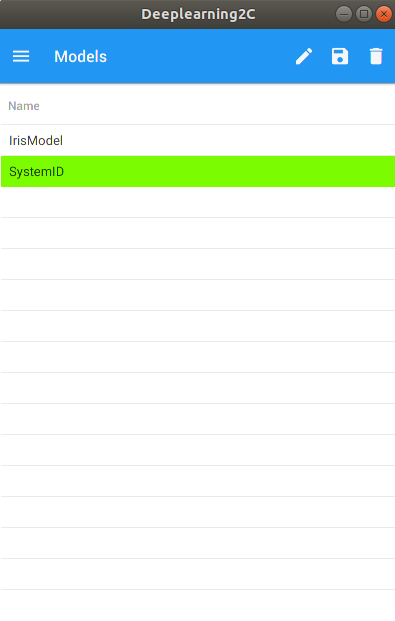
Then I go to menu.
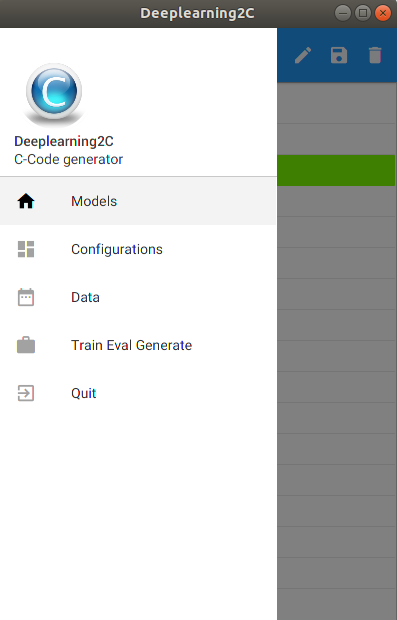
I change my global configuration.
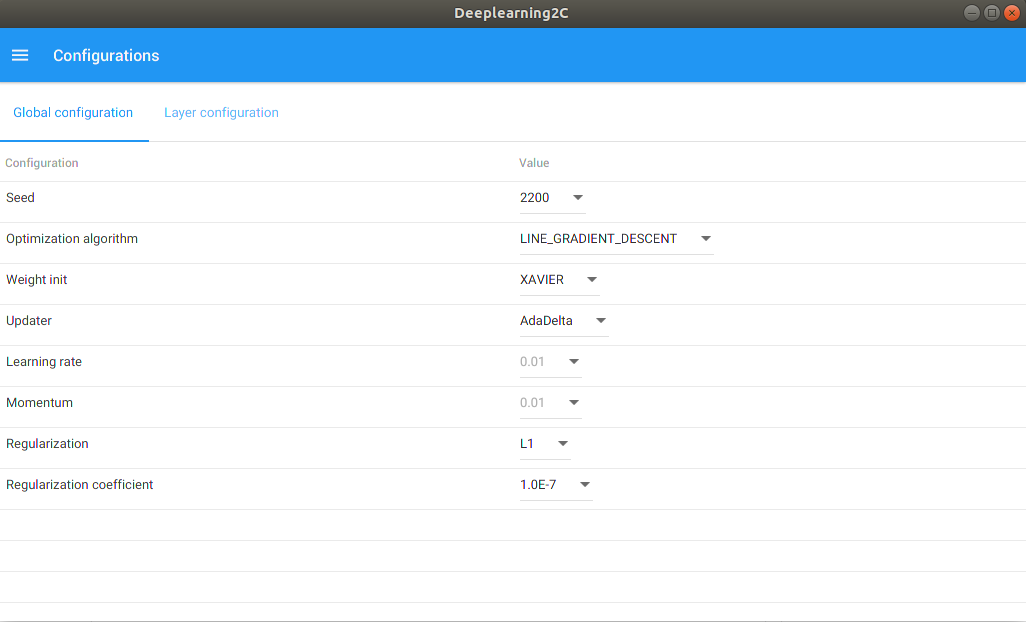
I change my layer configuration.
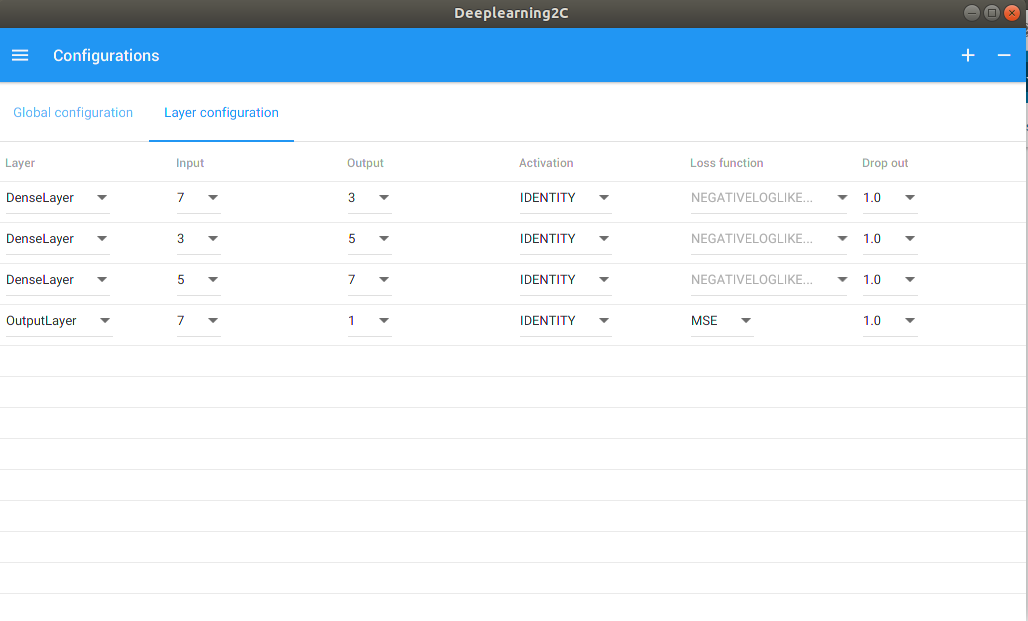
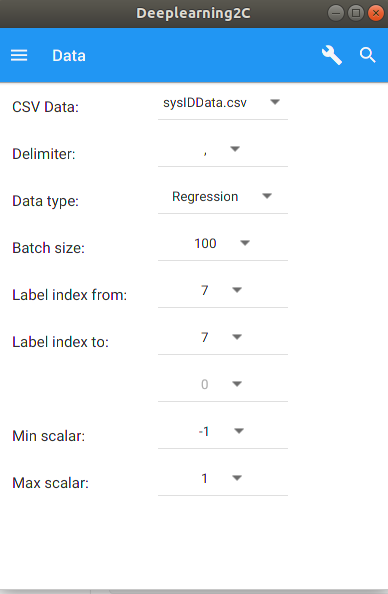
Then I insert the training data. Notice that 50% of that data is evaluation data.
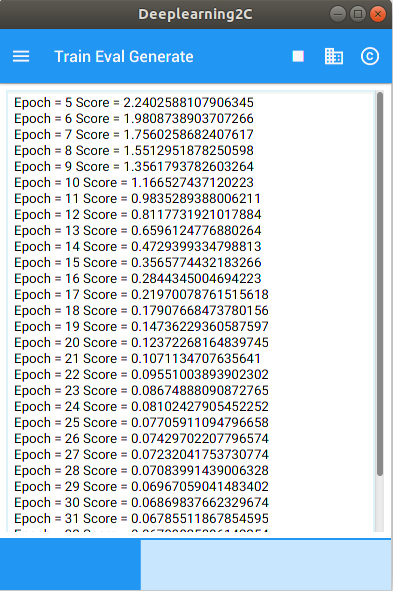
Now I train my model. Notice that I have a progress bar too.
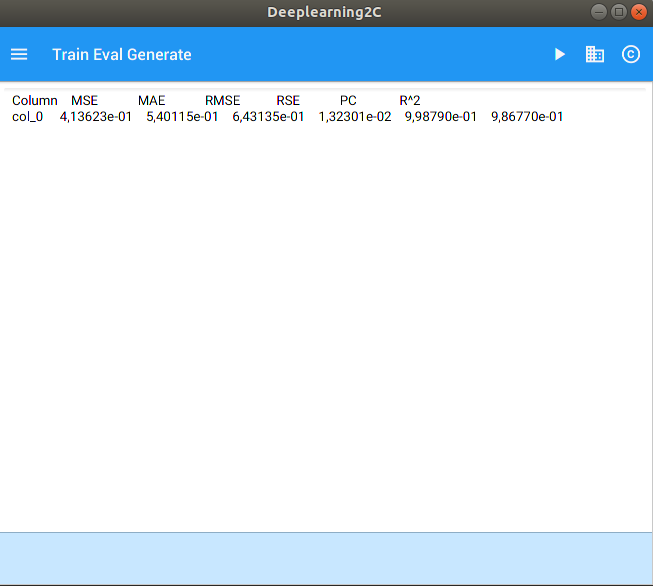
Now I evaluate my model.
And at last I generate C-code and M-code.
This is how a setup looks like in C-code
/*
============================================================================
Name : IrisModelC.c
Author : Daniel Mårtensson
Version :
Copyright : MIT
Description : Classification example
============================================================================
*/
#include <stdio.h>
#include <stdlib.h>
#include "IrisModel.h"
/*
* This example has been trained with irisData.csv
*/
int main() {
// Input
float input[3][4] = {{4.4,3.0,1.3,0.2}, // Expected output: [1 0 0]
{6.5,2.8,4.6,1.5}, // Expected output: [0 1 0]
{6.7,3.0,5.2,2.3}}; // Expected output: [0 0 1]
// Compute output
float output[3] = {0,0,0};
for(int i = 0; i < 3; i++){
IrisModel(input[i], output);
// Print result
for(int j = 0; j < 3; j++){
printf("Output %i = %f\n", j, output[j]);
}
printf("\n");
}
/*
* Result:
* Output 0 = 0.999826
Output 1 = 0.000173
Output 2 = 0.000001
Output 0 = 0.000038
Output 1 = 0.999506
Output 2 = 0.000456
Output 0 = 0.000012
Output 1 = 0.000806
Output 2 = 0.999182
*/
return EXIT_SUCCESS;
}
/*
* In MATLAB/GNU Octave it will look like this from the M-files folder
*
* >> IrisModel([4.4,3.0,1.3,0.2])
ans =
9.9983e-01
1.7323e-04
1.0835e-06
>> IrisModel([6.5,2.8,4.6,1.5])
ans =
3.8034e-05
9.9951e-01
4.5604e-04
>> IrisModel([6.7,3.0,5.2,2.3])
ans =
1.1771e-05
8.0585e-04
9.9918e-01
>>
*
*/
This is how a C-code generation example looks like for this model.
/*
* Model: IrisModel
*
*
* Created on: 2019-11-09 14:58:58
* Generated by: Deeplearning2C
* Author: Daniel Mårtensson
*/
#include "IrisModel.h"
#include "BLAS/f2c.h"
#include "BLAS/functions.h"
void IrisModel(float* input, float* output){
integer m = 0; // Real row dimension of non-transpose A
integer n = 0; // Real column dimension of non-transpose A
real alpha = 1; // Always 1
real beta = 1; // Always 1
integer incx = 1; // Always 1
integer incy = 1; // Always 1
char trans = 'N'; // We have transpose matrix A'
/*
* We are using BLAS subroutine sgemv for solving y = alpha*A*x + beta*y
* The BLAS subroutine is the same routine that is used in EmbeddedLapack
* Solve the equations like:
* b0 = act(W0*input + b0)
* b1 = act(W1*b0 + b1)
* b2 = act(W2*b1 + b2)
* b3 = act(W3*b2 + b3)
* b4 = act(W4*b3 + b4)
* ....
* ....
* output = act(Wi*b(i-1) + bi)
*/
real b0[1*3]={ -0.6087, 0.4616, 2.5645e-5};
real W0[4*3]={ -0.8625, -0.3397, -0.4687,
0.2872, 0.8155, -0.9267,
1.0887, 0.0980, -0.4534,
0.3455, -1.0067, -0.1949};
m = 3;
n = 4;
sgemv_(&trans, &m, &n, &alpha, W0, &m, input, &incx, &beta, b0, &incy); // Layer - first - index 0
activation(b0, m, "TANH");
real b1[1*5]={ 0.2643, 0.3509, -0.2505, 0.8730, 0.0396};
real W1[3*5]={ -1.1832, 0.4539, 1.0578, -1.1785, -0.9066,
0.7488, -1.0097, -1.3093, 0.8479, 1.2361,
0.2831, -0.8899, 0.1930, -0.8783, 0.1381};
m = 5;
n = 3;
sgemv_(&trans, &m, &n, &alpha, W1, &m, b0, &incx, &beta, b1, &incy); // Layer - middle - index 1
activation(b1, m, "RELU");
real b2[1*7]={ 0.0912, 0.0025, -0.1656, 0.0260, 0.3964, 0.0171, 0.0286};
real W2[5*7]={ -0.7311, -0.6416, 0.2090, -0.1302, -0.1392, 0.9976, -0.3457,
0.5444, 0.6307, 0.6810, -0.6130, 0.9825, -0.9786, 0.5479,
1.4267, 0.5012, 0.5435, -0.3866, -0.4932, -0.4949, 0.2377,
-0.7485, -1.1880, -0.9329, -0.8541, 1.2560, 0.8988, -1.0148,
-0.1380, -0.2079, 0.6905, 0.0116, -1.1755, 1.1405, 0.2818};
m = 7;
n = 5;
sgemv_(&trans, &m, &n, &alpha, W2, &m, b1, &incx, &beta, b2, &incy); // Layer - middle - index 2
activation(b2, m, "RELU");
real b3[1*3]={ -0.3134, 0.4090, -0.3947};
real W3[7*3]={ -0.1978, 0.0382, 1.3856,
0.0070, -0.7251, 0.7150,
0.1413, -0.2986, 0.8372,
0.6356, -0.2417, -0.2545,
-0.9164, 1.7475, -0.4681,
1.2910, -0.9558, -0.7706,
0.1475, -0.5468, 1.7383};
m = 3;
n = 7;
sgemv_(&trans, &m, &n, &alpha, W3, &m, b2, &incx, &beta, b3, &incy); // Layer - last - index 3
activation(b3, m, "SOFTMAX");
memcpy(output, b3, m*sizeof(float));
}
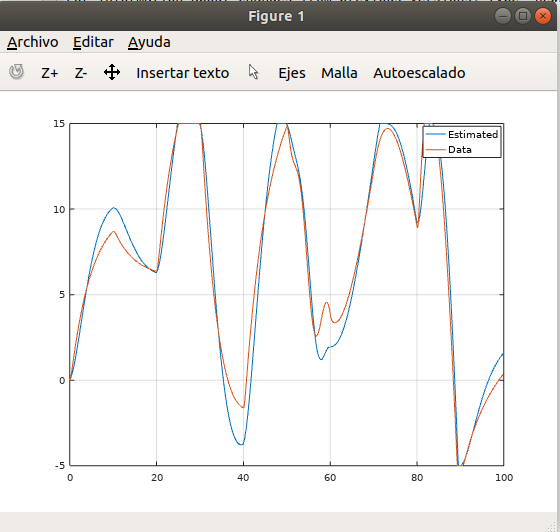
I also tried system identification.
%Model
sys = ss(0, [0 1; -1 -5], [0; 2], [1 0]);
% Signals
u1 = linspace(5,5, 100);
u2 = linspace(3,3, 100);
u3 = linspace(10,10, 100);
u4 = linspace(-4, -1, 100);
u5 = linspace(8, 9, 100);
u6 = 5*sin(linspace(0, 10, 100));
u7 = linspace(1, 10, 100);
u8 = linspace(10, 1, 100);
u9 = linspace(20, -20, 100);
u10 = linspace(0, 1, 100);
u = [u1 u2 u3 u4 u5 u6 u7 u8 u9 u10];
% Time
t = linspace(0, 100, length(u));
% Simulation with limits -5 and 15 on position and Inf on speed
y = satlsim(sys, u, t, [0;0], [-5 15; -Inf Inf]);
% Generate CSV file. Here we take adventage of transfer function estimation idea!
np = 5; % Number of poles
nz = 2; % Number of zeros
% check which one is largest
kn = length(u); % or length(y)
% Create b vector - all the y[k]
b = y(1:kn)';
% Create A1 matrix
A1 = zeros(kn, np);
% Fill A1 matrix - The y values
for i = 1:kn
for j = 1:np
if i-j <= 0
A1(i,j) = 0;
else
A1(i,j) = -y(i-j);
end
end
end
% Create A2 matrix
A2 = zeros(kn, nz);
% Fill A2 matrix - The u values
for i = 1:kn
for j = 1:nz
if i-j <= 0
A2(i,j) = 0;
else
A2(i,j) = u(i-j);
end
end
end
% Merge A1 and A2 into A
A = [A1 A2 b]; % This is ODE -y(t-1), -y(t-2), -y(t-3), -y(t-4), -y(t-5), u(t), u(t-1), y(t)
csvwrite('sysIDData.csv', A);
% Now we have trained our model and now we are doing a simulation
Y = zeros(1, np);
U = zeros(1, nz);
alpha = 2; % Reference scalar
for i = 1:length(u)
% Insert signal u
U = [u(i)*alpha U];
U(end) = [];
% Run model
output = SystemID([Y U]);
% Saturation
if(output > 15)
output = 15;
elseif(output < -5)
output = -5;
end
y(i) = output;
% Insert output to Y
Y = [-output Y]; % Important with negative output due to the ODE above
Y(end) = [];
end
% Plot now the identified model
figure(2);
plot(t, y);
And here is the result. Remember that even if I have used a linear model, I still implemented limits = nonlinearities.
The M-file looks like this:
%
% Model: SystemID
%
%
% Created on: 2019-11-09 16:40:27
% Generated by: Deeplearning2C
% Author: Daniel Mårtensson
%
function [output] = SystemID(input)
%
% We are solving y = A*x + y
% Solve the equations like:
% b0 = act(W0*input + b0)
% b1 = act(W1*b0 + b1)
% b2 = act(W2*b1 + b2)
% b3 = act(W3*b2 + b3)
% b4 = act(W4*b3 + b4)
% ....
% ....
% output = act(Wi*b(i-1) + bi)
%
b0=[ -0.1120, -0.0402, 0.0032];
W0=[ -0.4450, 0.8477, -0.2015,
-0.1879, -0.0192, -0.8595,
0.3868, -0.4800, -0.3430,
0.1157, 0.3368, 0.2539,
0.1334, 0.0973, 0.4526,
-0.1038, -0.0941, 0.1836,
-0.2202, -0.0552, 0.7346];
b0 = act(W0'*input' + b0','IDENTITY'); % Layer - first - index 0
b1=[ 0.0102, 0.0316, 0.0915, -0.0355, -0.0222];
W1=[ 1.2714, 0.6818, -0.3331, -0.1709, -0.4642,
-0.2216, -1.0645, 0.3952, 0.3615, 0.0884,
-0.7550, 0.4536, -0.0688, -0.5332, -0.5289];
b1 = act(W1'*b0 + b1','IDENTITY'); % Layer - middle - index 1
b2=[ -0.0227, -0.0226, 0.0232, -0.0238, -0.0266, -0.0021, 0.0443];
W2=[ 0.0281, -0.0413, 0.5902, -0.0024, 0.0744, -0.5026, -0.4177,
-0.0679, -0.2938, -0.1893, -0.3184, -0.3986, -0.1307, 0.3192,
0.2063, 0.1591, -0.0780, -0.5964, -0.1422, 0.0107, 0.2338,
0.1595, 0.2026, -0.1367, -0.3870, -0.4170, 0.1332, 0.1796,
0.3216, 0.1110, -0.5306, -0.1794, -0.6428, 0.3067, 0.3833];
b2 = act(W2'*b1 + b2','IDENTITY'); % Layer - middle - index 2
b3=[ 0.0222];
W3=[ -0.6130,
-0.7850,
0.2164,
-0.1898,
-0.0856,
-0.5568,
0.0538];
output = act(W3'*b2 + b3','IDENTITY'); % Layer - last - index 3
end
You need to have OpenJDK 8 and OpenJFX 8 installed. If you are a linux user, you can follow step 1 and 2.
- Install OpenJDK 8
sudo apt-get install openjdk-8-jdk
- Install OpenJFX 8
Open sources.list file
cd /etc/apt
sudo nano sources.list
Paste this into the file and save and close
deb http://de.archive.ubuntu.com/ubuntu/ bionic universe
Run these code inside the terminal
sudo apt-get update
sudo apt install openjfx=8u161-b12-1ubuntu2 libopenjfx-java=8u161-b12-1ubuntu2 libopenjfx-jni=8u161-b12-1ubuntu2 openjfx-source=8u161-b12-1ubuntu2
sudo apt-mark hold libopenjfx-java libopenjfx-jni openjfx openjfx-source
- Download the project and go to the project folder and run the command
./gradlew run
For Linux/Mac or
gradlew run
For Windows
I have been using Eclipse IDE.
- Install Eclipse 2018-09 (4.9.0) R (Because Eclipse 2018-09 will only work with Gluon Plugin 2.6.0)
https://www.eclipse.org/downloads/packages/release/2018-09/r
- Install Gluon Plugin 2.6.0 inside Eclipse
Help -> Eclipse Marketplace -> Gluon 2.6.0
First of all. The installation file is over 372 megabytes for Android. That's huge, but anyway it's still possible to install. Right now, I have excluded the most large dependencies which I don't use. Look in the build.gradle file.
-
See the getting started guide for using GluonHQ JavaFX for mobile development. It's a very easy and excellent done graphical manual. It describes how to set up the Android SDK etc. https://docs.gluonhq.com/getting-started/#introduction
-
Troubleshooting for Android can be done this way, if you got some issues with the application on the phone, but not on desktop. See selected answer https://stackoverflow.com/questions/42253794/androidinstall-task-causes-a-no-connected-devices-error
- Upgrade the C-code and M-code generator for LSTM networks.
I have always like clean god written code and pedagogy explanations. So I'm going to give you an introduction what every file do. I like to keep files as short as possible. Around 250-300 lines per each java file is a suitable java file.
- DrawerManager.java -> Handles the menu slide to the left
- Main.java -> Handles the import of new JavaFX pages
- DL4JData.java -> Handles everything that has to do with CSV handling for DL4J
- DL4JModel.java -> Handles everything that has to do with the model (save, load, generate etc.)
- DL4JSerializableConfiguration.java -> Handles saving and loading layers and global config to .ser files
- DL4JThread.java -> Handles training and using the text area and progress bar inside the TrainEvalGeneratePresenter.java file
- Dialogs.java -> Handles everything that has to do with pop-up dialogs
- FileHandler.java -> Handles file system, write files, read files and create files
- SimpleDependencyInjection.java -> Create a static object of DL4JModel.java so we can have access to DL4JModel everywhere
- ConfigurationsPresenter.java -> Handles GUI view for configuration
- DataPresenter.java -> Handles the GUI view for CSV import
- ModelsPresenter.java -> Handles the GUI view for model creation and delete/save
- TrainEvalGeneratePresenter.java -> Handles the GUI view for train, eval and generate C-code
Every file inside se.danielmartensson.views package that contains the word "View" inside its name is only for importing the GUI inside Main.java file. These files never changes.
- Tutorials -> Add seed, regularization coefficient, learning rate, momentum
- Tutorials -> Add new updater
- Tutorials -> Add new layer
- Tutorials -> Add inputs and outputs
- Tutorials -> Add new functionality to layers