This package includes Ground Removal, Object Clustering, Bounding Box, IMM-UKF-JPDAF, Track Management and Object Classification for 3D-LIDAR multi object tracking. The idea is mainly come from this paper.
Make sure you have the following is installed:
- ROS Kinetic
- PCL 1.7.2
- Open CV 3.2【PCL自带opencv,不用安装】
- Download the Kitti Raw data.
// 地址已失效
wget http://kitti.is.tue.mpg.de/kitti/raw_data/2011_09_26_drive_0002/2011_09_26_drive_0005_sync.zip
wget http://kitti.is.tue.mpg.de/kitti/raw_data/2011_09_26_calib.zip
// 使用下面下载
https://s3.eu-central-1.amazonaws.com/avg-kitti/raw_data/2011_09_26_calib.zip
https://s3.eu-central-1.amazonaws.com/avg-kitti/raw_data/2011_09_26_drive_0005/2011_09_26_drive_0005_sync.zip
- Convert raw data to rosbag by using the tool made by tomas789. This is his repository.
PLEASE make sure you load the files, src/ego_velo.txt and src/ego_yaw.txt in src/imm_ukf_jpda.cpp l68, l69
roscore
rosbag play ~/data/KittiRawdata/2011_09_26_drive_0005_sync/kitti_2011_09_26_drive_0005_synced.bag
# 下面`--loop`循环paly不推荐加,tracking和上一帧有关,误差越来越大
rosbag play ~/data/KittiRawdata/2011_09_26_drive_0005_sync/kitti_2011_09_26_drive_0005_synced.bag --loop
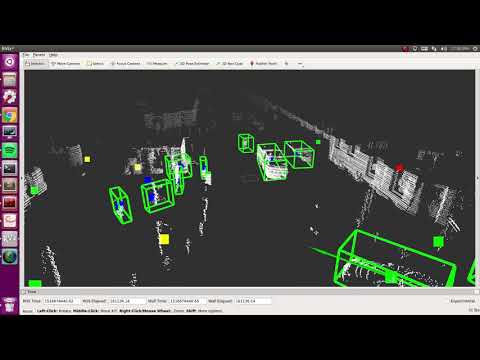
rviz

rosrun object_tracking0 main input:=/kitti/velo/pointcloud