We explain how HarmonicBalance.jl uses a new technique to find limit cycles in systems of nonlinear ODEs. For a more in depth overwiew see Chapter 6 in Jan Košata's PhD theses or del_Pino_2024.
We explain how HarmonicBalance.jl uses a new technique to find limit cycles in systems of nonlinear ODEs. For a more in depth overwiew see Chapter 6 in Jan Košata's PhD theses or del_Pino_2024.
If we set the cubic nonlinearity to zero, we recover the driven damped harmonic oscillator. Indeed, thefirst order the quadratic nonlinearity has no affect on the system.
If we set the cubic nonlinearity to zero, we recover the driven damped harmonic oscillator. Indeed, thefirst order the quadratic nonlinearity has no affect on the system.
',8))])}const w=h(d,[["render",F]]);export{b as __pageData,w as default};
diff --git a/v0.10.10/assets/examples_parametron.md.FBsDd68L.js b/v0.10.10/assets/examples_parametron.md.FBsDd68L.js
new file mode 100644
index 00000000..a7d23633
--- /dev/null
+++ b/v0.10.10/assets/examples_parametron.md.FBsDd68L.js
@@ -0,0 +1,60 @@
+import{_ as n,c as e,j as t,a as s,a4 as Q,o as i}from"./chunks/framework.TrWZWXe1.js";const l="/HarmonicBalance.jl/v0.10.10/assets/cqedvtw.dPeTlm0F.png",T="/HarmonicBalance.jl/v0.10.10/assets/rompbio.Do-6uLTq.png",o="/HarmonicBalance.jl/v0.10.10/assets/xdobcae.mO0PYFPf.png",r="/HarmonicBalance.jl/v0.10.10/assets/segruob.DI24r_GW.png",d="/HarmonicBalance.jl/v0.10.10/assets/eqpfvsu.CgAFtDUH.png",I=JSON.parse('{"title":"Parametrically driven resonator","description":"","frontmatter":{},"headers":[],"relativePath":"examples/parametron.md","filePath":"examples/parametron.md"}'),p={name:"examples/parametron.md"},h={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},m={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"64.136ex",height:"2.565ex",role:"img",focusable:"false",viewBox:"0 -883.9 28348.1 1133.9","aria-hidden":"true"},k={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},g={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"21.036ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 9297.8 1000","aria-hidden":"true"},u={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},c={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.489ex"},xmlns:"http://www.w3.org/2000/svg",width:"4.7ex",height:"2.375ex",role:"img",focusable:"false",viewBox:"0 -833.9 2077.6 1049.9","aria-hidden":"true"},y={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},H={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"3.871ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 1711 1000","aria-hidden":"true"},x={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},w={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.594ex"},xmlns:"http://www.w3.org/2000/svg",width:"61.8ex",height:"2.594ex",role:"img",focusable:"false",viewBox:"0 -883.9 27315.5 1146.5","aria-hidden":"true"},f={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},E={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},L={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},v={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},b={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},M={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"26.573ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 11745.3 1000","aria-hidden":"true"},F={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},V={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},D={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},C={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},Z={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},j={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.375ex"},xmlns:"http://www.w3.org/2000/svg",width:"11.867ex",height:"1.997ex",role:"img",focusable:"false",viewBox:"0 -717 5245.1 882.6","aria-hidden":"true"},B={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},A={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.027ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.319ex",height:"1.597ex",role:"img",focusable:"false",viewBox:"0 -694 583 706","aria-hidden":"true"},q={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},O={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},R={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},S={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.027ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.319ex",height:"1.597ex",role:"img",focusable:"false",viewBox:"0 -694 583 706","aria-hidden":"true"};function N(P,a,z,J,G,K){return i(),e("div",null,[a[66]||(a[66]=t("h1",{id:"parametron",tabindex:"-1"},[s("Parametrically driven resonator "),t("a",{class:"header-anchor",href:"#parametron","aria-label":'Permalink to "Parametrically driven resonator {#parametron}"'},"")],-1)),a[67]||(a[67]=t("p",null,[s("One of the most famous effects displaced by nonlinear oscillators is parametric resonance, where the frequency of the linear resonator is modulated in time "),t("a",{href:"https://doi.org/10.1103/PhysRevE.94.022201",target:"_blank",rel:"noreferrer"},"Phys. Rev. E 94, 022201 (2016)"),s(". In the following we analyse this system, governed by the equations")],-1)),t("mjx-container",h,[(i(),e("svg",m,a[0]||(a[0]=[Q('',1)]))),a[1]||(a[1]=t("mjx-assistive-mml",{unselectable:"on",display:"block",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",overflow:"hidden",width:"100%"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML",display:"block"},[t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"¨")])]),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mo",null,"+"),t("mi",null,"γ"),t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"˙")])]),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mo",null,"+"),t("msup",null,[t("mi",{mathvariant:"normal"},"Ω"),t("mn",null,"2")]),t("mo",{stretchy:"false"},"("),t("mn",null,"1"),t("mo",null,"−"),t("mi",null,"λ"),t("mi",null,"cos"),t("mo",{"data-mjx-texclass":"NONE"},""),t("mo",{stretchy:"false"},"("),t("mn",null,"2"),t("mi",null,"ω"),t("mi",null,"t"),t("mo",null,"+"),t("mi",null,"ψ"),t("mo",{stretchy:"false"},")"),t("mo",{stretchy:"false"},")"),t("mi",null,"x"),t("mo",null,"+"),t("mi",null,"α"),t("msup",null,[t("mi",null,"x"),t("mn",null,"3")]),t("mo",null,"+"),t("mi",null,"η"),t("msup",null,[t("mi",null,"x"),t("mn",null,"2")]),t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"˙")])]),t("mo",null,"+"),t("msub",null,[t("mi",null,"F"),t("mtext",null,"d")]),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mo",null,"="),t("mn",null,"0")])],-1))]),t("p",null,[a[6]||(a[6]=s("where for completeness we also considered an external drive term ")),t("mjx-container",k,[(i(),e("svg",g,a[2]||(a[2]=[Q('',1)]))),a[3]||(a[3]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"F"),t("mtext",null,"d")]),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mo",null,"="),t("mi",null,"F"),t("mi",null,"cos"),t("mo",{"data-mjx-texclass":"NONE"},""),t("mo",{stretchy:"false"},"("),t("mi",null,"ω"),t("mi",null,"t"),t("mo",null,"+"),t("mi",null,"θ"),t("mo",{stretchy:"false"},")")])],-1))]),a[7]||(a[7]=s(" and a nonlinear damping term ")),t("mjx-container",u,[(i(),e("svg",c,a[4]||(a[4]=[Q('',1)]))),a[5]||(a[5]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"η"),t("msup",null,[t("mi",null,"x"),t("mn",null,"2")]),t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"˙")])])])],-1))])]),a[68]||(a[68]=Q('
To implement this system in Harmonic Balance, we first import the library
julia
using HarmonicBalance
',2)),t("p",null,[a[10]||(a[10]=s("Subsequently, we type define parameters in the problem and the oscillating amplitude function ")),t("mjx-container",y,[(i(),e("svg",H,a[8]||(a[8]=[Q('',1)]))),a[9]||(a[9]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"x"),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")")])],-1))]),a[11]||(a[11]=s(" using the ")),a[12]||(a[12]=t("code",null,"variables",-1)),a[13]||(a[13]=s(" macro from ")),a[14]||(a[14]=t("code",null,"Symbolics.jl",-1))]),a[69]||(a[69]=Q(`
The output of these equations are consistent with the result found in the literature. Now we are interested in the linear response spectrum, which we can obtain from the solutions to the averaged equations (rotating frame) as a function of the external drive, after fixing all other parameters in the system. A call to get_steady_states then retrieves all steadystates found allong the sweep employing the homotopy continuation method, which occurs in a complex space (see the nice HomotopyContinuation.jl docs)
A steady state result for 100 parameter points
+
+Solution branches: 5
+ of which real: 5
+ of which stable: 3
+
+Classes: stable, physical, Hopf, binary_labels
`,2)),t("p",null,[a[37]||(a[37]=s("In ")),a[38]||(a[38]=t("code",null,"get_steady_states",-1)),a[39]||(a[39]=s(", the default value for the keyword ")),a[40]||(a[40]=t("code",null,"method=:random_warmup",-1)),a[41]||(a[41]=s(" initiates the homotopy in a generalised version of the harmonic equations, where parameters become random complex numbers. A parameter homotopy then follows to each of the frequency values ")),t("mjx-container",D,[(i(),e("svg",C,a[35]||(a[35]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D714",d:"M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z",style:{"stroke-width":"3"}})])])],-1)]))),a[36]||(a[36]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"ω")])],-1))]),a[42]||(a[42]=s(" in sweep. This offers speed-up, but requires to be tested in each scenario againts the method ")),a[43]||(a[43]=t("code",null,":total_degree",-1)),a[44]||(a[44]=s(", which initializes the homotopy in a total degree system (maximum number of roots), but needs to track significantly more homotopy paths and there is slower. The ")),a[45]||(a[45]=t("code",null,"threading",-1)),a[46]||(a[46]=s(" keyword enables parallel tracking of homotopy paths, and it's set to ")),a[47]||(a[47]=t("code",null,"false",-1)),a[48]||(a[48]=s(" simply because we are using a single core computer for now."))]),a[73]||(a[73]=Q('
After solving the system, we can save the full output of the simulation and the model (e.g. symbolic expressions for the harmonic equations) into a file
During the execution of get_steady_states, different solution branches are classified by their proximity in complex space, with subsequent filtering of real (physically accceptable solutions). In addition, the stability properties of each steady state is assesed from the eigenvalues of the Jacobian matrix. All this information can be succintly represented in a 1D plot via
julia
plot(result; x="ω", y="sqrt(u1^2 + v1^2)")
The user can also introduce custom clases based on parameter conditions via classify_solutions!. Plots can be overlaid and use keywords from Plots, MarkdownAST.LineBreak()
Now, we count the number of solutions for each point and represent the corresponding phase diagram in parameter space. This is done using plot_phase_diagram. Only counting stable solutions,
julia
plot_phase_diagram(result_2D; class="stable")
In addition to phase diagrams, we can plot functions of the solution. The syntax is identical to 1D plotting. Let us overlay 2 branches into a single plot,
Note that solutions are ordered in parameter space according to their closest neighbors. Plots can again be limited to a given class (e.g stable solutions only) through the keyword argument class.
',11))])}const W=n(p,[["render",N]]);export{I as __pageData,W as default};
diff --git a/v0.10.10/assets/examples_parametron.md.FBsDd68L.lean.js b/v0.10.10/assets/examples_parametron.md.FBsDd68L.lean.js
new file mode 100644
index 00000000..a7d23633
--- /dev/null
+++ b/v0.10.10/assets/examples_parametron.md.FBsDd68L.lean.js
@@ -0,0 +1,60 @@
+import{_ as n,c as e,j as t,a as s,a4 as Q,o as i}from"./chunks/framework.TrWZWXe1.js";const l="/HarmonicBalance.jl/v0.10.10/assets/cqedvtw.dPeTlm0F.png",T="/HarmonicBalance.jl/v0.10.10/assets/rompbio.Do-6uLTq.png",o="/HarmonicBalance.jl/v0.10.10/assets/xdobcae.mO0PYFPf.png",r="/HarmonicBalance.jl/v0.10.10/assets/segruob.DI24r_GW.png",d="/HarmonicBalance.jl/v0.10.10/assets/eqpfvsu.CgAFtDUH.png",I=JSON.parse('{"title":"Parametrically driven resonator","description":"","frontmatter":{},"headers":[],"relativePath":"examples/parametron.md","filePath":"examples/parametron.md"}'),p={name:"examples/parametron.md"},h={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},m={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"64.136ex",height:"2.565ex",role:"img",focusable:"false",viewBox:"0 -883.9 28348.1 1133.9","aria-hidden":"true"},k={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},g={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"21.036ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 9297.8 1000","aria-hidden":"true"},u={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},c={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.489ex"},xmlns:"http://www.w3.org/2000/svg",width:"4.7ex",height:"2.375ex",role:"img",focusable:"false",viewBox:"0 -833.9 2077.6 1049.9","aria-hidden":"true"},y={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},H={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"3.871ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 1711 1000","aria-hidden":"true"},x={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},w={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.594ex"},xmlns:"http://www.w3.org/2000/svg",width:"61.8ex",height:"2.594ex",role:"img",focusable:"false",viewBox:"0 -883.9 27315.5 1146.5","aria-hidden":"true"},f={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},E={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},L={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},v={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},b={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},M={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"26.573ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 11745.3 1000","aria-hidden":"true"},F={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},V={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},D={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},C={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},Z={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},j={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.375ex"},xmlns:"http://www.w3.org/2000/svg",width:"11.867ex",height:"1.997ex",role:"img",focusable:"false",viewBox:"0 -717 5245.1 882.6","aria-hidden":"true"},B={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},A={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.027ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.319ex",height:"1.597ex",role:"img",focusable:"false",viewBox:"0 -694 583 706","aria-hidden":"true"},q={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},O={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},R={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},S={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.027ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.319ex",height:"1.597ex",role:"img",focusable:"false",viewBox:"0 -694 583 706","aria-hidden":"true"};function N(P,a,z,J,G,K){return i(),e("div",null,[a[66]||(a[66]=t("h1",{id:"parametron",tabindex:"-1"},[s("Parametrically driven resonator "),t("a",{class:"header-anchor",href:"#parametron","aria-label":'Permalink to "Parametrically driven resonator {#parametron}"'},"")],-1)),a[67]||(a[67]=t("p",null,[s("One of the most famous effects displaced by nonlinear oscillators is parametric resonance, where the frequency of the linear resonator is modulated in time "),t("a",{href:"https://doi.org/10.1103/PhysRevE.94.022201",target:"_blank",rel:"noreferrer"},"Phys. Rev. E 94, 022201 (2016)"),s(". In the following we analyse this system, governed by the equations")],-1)),t("mjx-container",h,[(i(),e("svg",m,a[0]||(a[0]=[Q('',1)]))),a[1]||(a[1]=t("mjx-assistive-mml",{unselectable:"on",display:"block",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",overflow:"hidden",width:"100%"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML",display:"block"},[t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"¨")])]),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mo",null,"+"),t("mi",null,"γ"),t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"˙")])]),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mo",null,"+"),t("msup",null,[t("mi",{mathvariant:"normal"},"Ω"),t("mn",null,"2")]),t("mo",{stretchy:"false"},"("),t("mn",null,"1"),t("mo",null,"−"),t("mi",null,"λ"),t("mi",null,"cos"),t("mo",{"data-mjx-texclass":"NONE"},""),t("mo",{stretchy:"false"},"("),t("mn",null,"2"),t("mi",null,"ω"),t("mi",null,"t"),t("mo",null,"+"),t("mi",null,"ψ"),t("mo",{stretchy:"false"},")"),t("mo",{stretchy:"false"},")"),t("mi",null,"x"),t("mo",null,"+"),t("mi",null,"α"),t("msup",null,[t("mi",null,"x"),t("mn",null,"3")]),t("mo",null,"+"),t("mi",null,"η"),t("msup",null,[t("mi",null,"x"),t("mn",null,"2")]),t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"˙")])]),t("mo",null,"+"),t("msub",null,[t("mi",null,"F"),t("mtext",null,"d")]),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mo",null,"="),t("mn",null,"0")])],-1))]),t("p",null,[a[6]||(a[6]=s("where for completeness we also considered an external drive term ")),t("mjx-container",k,[(i(),e("svg",g,a[2]||(a[2]=[Q('',1)]))),a[3]||(a[3]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"F"),t("mtext",null,"d")]),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mo",null,"="),t("mi",null,"F"),t("mi",null,"cos"),t("mo",{"data-mjx-texclass":"NONE"},""),t("mo",{stretchy:"false"},"("),t("mi",null,"ω"),t("mi",null,"t"),t("mo",null,"+"),t("mi",null,"θ"),t("mo",{stretchy:"false"},")")])],-1))]),a[7]||(a[7]=s(" and a nonlinear damping term ")),t("mjx-container",u,[(i(),e("svg",c,a[4]||(a[4]=[Q('',1)]))),a[5]||(a[5]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"η"),t("msup",null,[t("mi",null,"x"),t("mn",null,"2")]),t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"˙")])])])],-1))])]),a[68]||(a[68]=Q('
To implement this system in Harmonic Balance, we first import the library
julia
using HarmonicBalance
',2)),t("p",null,[a[10]||(a[10]=s("Subsequently, we type define parameters in the problem and the oscillating amplitude function ")),t("mjx-container",y,[(i(),e("svg",H,a[8]||(a[8]=[Q('',1)]))),a[9]||(a[9]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"x"),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")")])],-1))]),a[11]||(a[11]=s(" using the ")),a[12]||(a[12]=t("code",null,"variables",-1)),a[13]||(a[13]=s(" macro from ")),a[14]||(a[14]=t("code",null,"Symbolics.jl",-1))]),a[69]||(a[69]=Q(`
The output of these equations are consistent with the result found in the literature. Now we are interested in the linear response spectrum, which we can obtain from the solutions to the averaged equations (rotating frame) as a function of the external drive, after fixing all other parameters in the system. A call to get_steady_states then retrieves all steadystates found allong the sweep employing the homotopy continuation method, which occurs in a complex space (see the nice HomotopyContinuation.jl docs)
A steady state result for 100 parameter points
+
+Solution branches: 5
+ of which real: 5
+ of which stable: 3
+
+Classes: stable, physical, Hopf, binary_labels
`,2)),t("p",null,[a[37]||(a[37]=s("In ")),a[38]||(a[38]=t("code",null,"get_steady_states",-1)),a[39]||(a[39]=s(", the default value for the keyword ")),a[40]||(a[40]=t("code",null,"method=:random_warmup",-1)),a[41]||(a[41]=s(" initiates the homotopy in a generalised version of the harmonic equations, where parameters become random complex numbers. A parameter homotopy then follows to each of the frequency values ")),t("mjx-container",D,[(i(),e("svg",C,a[35]||(a[35]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D714",d:"M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z",style:{"stroke-width":"3"}})])])],-1)]))),a[36]||(a[36]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"ω")])],-1))]),a[42]||(a[42]=s(" in sweep. This offers speed-up, but requires to be tested in each scenario againts the method ")),a[43]||(a[43]=t("code",null,":total_degree",-1)),a[44]||(a[44]=s(", which initializes the homotopy in a total degree system (maximum number of roots), but needs to track significantly more homotopy paths and there is slower. The ")),a[45]||(a[45]=t("code",null,"threading",-1)),a[46]||(a[46]=s(" keyword enables parallel tracking of homotopy paths, and it's set to ")),a[47]||(a[47]=t("code",null,"false",-1)),a[48]||(a[48]=s(" simply because we are using a single core computer for now."))]),a[73]||(a[73]=Q('
After solving the system, we can save the full output of the simulation and the model (e.g. symbolic expressions for the harmonic equations) into a file
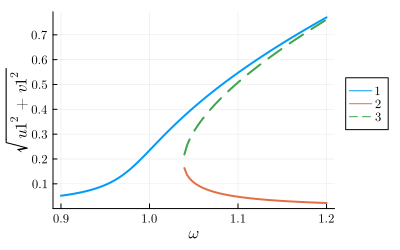
During the execution of get_steady_states, different solution branches are classified by their proximity in complex space, with subsequent filtering of real (physically accceptable solutions). In addition, the stability properties of each steady state is assesed from the eigenvalues of the Jacobian matrix. All this information can be succintly represented in a 1D plot via
julia
plot(result; x="ω", y="sqrt(u1^2 + v1^2)")
The user can also introduce custom clases based on parameter conditions via classify_solutions!. Plots can be overlaid and use keywords from Plots, MarkdownAST.LineBreak()
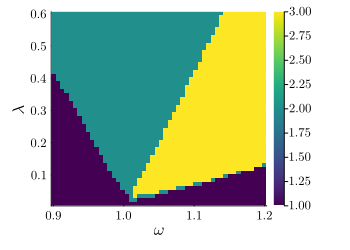
Now, we count the number of solutions for each point and represent the corresponding phase diagram in parameter space. This is done using plot_phase_diagram. Only counting stable solutions,
julia
plot_phase_diagram(result_2D; class="stable")
In addition to phase diagrams, we can plot functions of the solution. The syntax is identical to 1D plotting. Let us overlay 2 branches into a single plot,
Note that solutions are ordered in parameter space according to their closest neighbors. Plots can again be limited to a given class (e.g stable solutions only) through the keyword argument class.
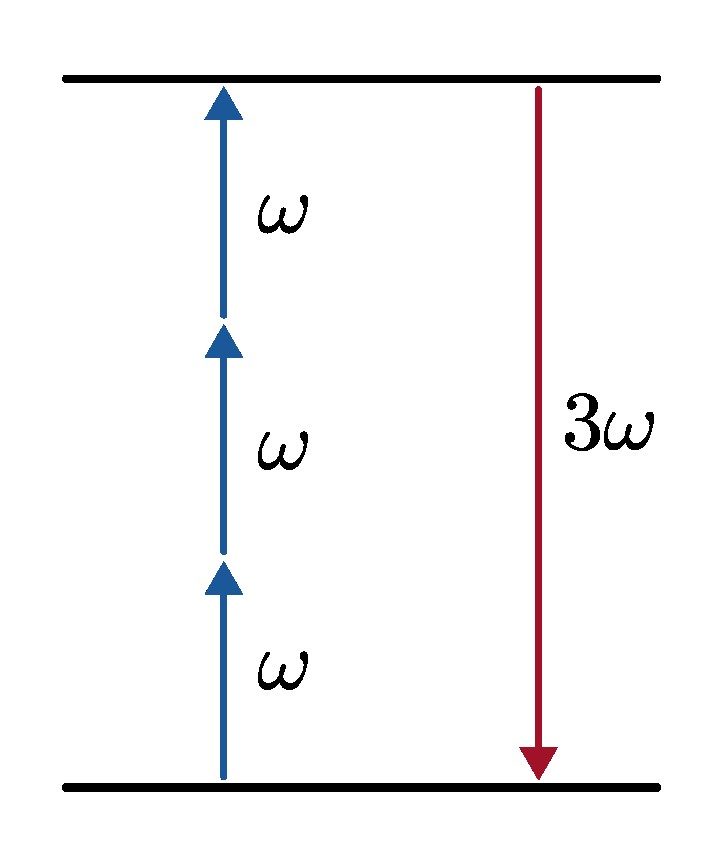
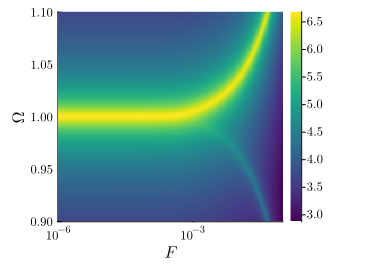
',3)),s("p",null,[i[11]||(i[11]=a("If we only have a cubic nonlineariy ")),s("mjx-container",g,[(e(),t("svg",m,i[7]||(i[7]=[s("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[s("g",{"data-mml-node":"math"},[s("g",{"data-mml-node":"mi"},[s("path",{"data-c":"1D6FC",d:"M34 156Q34 270 120 356T309 442Q379 442 421 402T478 304Q484 275 485 237V208Q534 282 560 374Q564 388 566 390T582 393Q603 393 603 385Q603 376 594 346T558 261T497 161L486 147L487 123Q489 67 495 47T514 26Q528 28 540 37T557 60Q559 67 562 68T577 70Q597 70 597 62Q597 56 591 43Q579 19 556 5T512 -10H505Q438 -10 414 62L411 69L400 61Q390 53 370 41T325 18T267 -2T203 -11Q124 -11 79 39T34 156ZM208 26Q257 26 306 47T379 90L403 112Q401 255 396 290Q382 405 304 405Q235 405 183 332Q156 292 139 224T121 120Q121 71 146 49T208 26Z",style:{"stroke-width":"3"}})])])],-1)]))),i[8]||(i[8]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mi",null,"α")])],-1))]),i[12]||(i[12]=a(", we observe the normal duffing oscillator response with no response at ")),s("mjx-container",u,[(e(),t("svg",E,i[9]||(i[9]=[n('',1)]))),i[10]||(i[10]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mn",null,"2"),s("mi",null,"ω")])],-1))]),i[13]||(i[13]=a("."))]),s("p",null,[i[24]||(i[24]=a("We would like to investigate the three-wave mixing of the driven Duffing oscillator. This means we can excite the system resonantly if the oscillation frequencies ")),s("mjx-container",y,[(e(),t("svg",x,i[14]||(i[14]=[n('',1)]))),i[15]||(i[15]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mn",null,"1")])])],-1))]),i[25]||(i[25]=a(" and ")),s("mjx-container",c,[(e(),t("svg",w,i[16]||(i[16]=[n('',1)]))),i[17]||(i[17]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mn",null,"2")])])],-1))]),i[26]||(i[26]=a(" fullfil the conditions ")),s("mjx-container",v,[(e(),t("svg",F,i[18]||(i[18]=[n('',1)]))),i[19]||(i[19]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mn",null,"1")]),s("mo",null,"±"),s("msub",null,[s("mi",null,"ω"),s("mn",null,"2")]),s("mo",null,"="),s("mo",null,"±"),s("msub",null,[s("mi",null,"ω"),s("mn",null,"0")])])],-1))]),i[27]||(i[27]=a(". Here, we will especially focus on the degenerate three wave mixing, where ")),s("mjx-container",f,[(e(),t("svg",C,i[20]||(i[20]=[n('',1)]))),i[21]||(i[21]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mn",null,"2")]),s("mo",null,"="),s("msub",null,[s("mi",null,"ω"),s("mn",null,"0")])])],-1))]),i[28]||(i[28]=a(" such that ")),s("mjx-container",b,[(e(),t("svg",D,i[22]||(i[22]=[n('',1)]))),i[23]||(i[23]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mn",null,"2"),s("msub",null,[s("mi",null,"ω"),s("mn",null,"0")]),s("mo",null,"="),s("msub",null,[s("mi",null,"ω"),s("mn",null,"1")])])],-1))]),i[29]||(i[29]=a(". This is a very important process in quantum optics, since it allows us to generate photons with a frequency in the visible range from photons with a frequency in the infrared range. This is called frequency doubling and is used in many applications, e.g. in laser pointers."))]),i[55]||(i[55]=n(`
',3)),s("p",null,[i[34]||(i[34]=a("If we only have a cubic nonlineariy ")),s("mjx-container",V,[(e(),t("svg",M,i[30]||(i[30]=[s("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[s("g",{"data-mml-node":"math"},[s("g",{"data-mml-node":"mi"},[s("path",{"data-c":"1D6FC",d:"M34 156Q34 270 120 356T309 442Q379 442 421 402T478 304Q484 275 485 237V208Q534 282 560 374Q564 388 566 390T582 393Q603 393 603 385Q603 376 594 346T558 261T497 161L486 147L487 123Q489 67 495 47T514 26Q528 28 540 37T557 60Q559 67 562 68T577 70Q597 70 597 62Q597 56 591 43Q579 19 556 5T512 -10H505Q438 -10 414 62L411 69L400 61Q390 53 370 41T325 18T267 -2T203 -11Q124 -11 79 39T34 156ZM208 26Q257 26 306 47T379 90L403 112Q401 255 396 290Q382 405 304 405Q235 405 183 332Q156 292 139 224T121 120Q121 71 146 49T208 26Z",style:{"stroke-width":"3"}})])])],-1)]))),i[31]||(i[31]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mi",null,"α")])],-1))]),i[35]||(i[35]=a(", we observe the normal duffing oscillator response with no response at ")),s("mjx-container",B,[(e(),t("svg",H,i[32]||(i[32]=[n('',1)]))),i[33]||(i[33]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mn",null,"2"),s("mi",null,"ω")])],-1))]),i[36]||(i[36]=a("."))]),s("p",null,[i[47]||(i[47]=a("We would like to investigate the three-wave mixing of the driven Duffing oscillator. This means we can excite the system resonantly if the oscillation frequencies ")),s("mjx-container",L,[(e(),t("svg",A,i[37]||(i[37]=[n('',1)]))),i[38]||(i[38]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mn",null,"1")])])],-1))]),i[48]||(i[48]=a(" and ")),s("mjx-container",Z,[(e(),t("svg",j,i[39]||(i[39]=[n('',1)]))),i[40]||(i[40]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mn",null,"2")])])],-1))]),i[49]||(i[49]=a(" fullfil the conditions ")),s("mjx-container",q,[(e(),t("svg",z,i[41]||(i[41]=[n('',1)]))),i[42]||(i[42]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mn",null,"1")]),s("mo",null,"±"),s("msub",null,[s("mi",null,"ω"),s("mn",null,"2")]),s("mo",null,"="),s("mo",null,"±"),s("msub",null,[s("mi",null,"ω"),s("mn",null,"0")])])],-1))]),i[50]||(i[50]=a(". Here, we will especially focus on the degenerate three wave mixing, where ")),s("mjx-container",S,[(e(),t("svg",J,i[43]||(i[43]=[n('',1)]))),i[44]||(i[44]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mn",null,"2")]),s("mo",null,"="),s("msub",null,[s("mi",null,"ω"),s("mn",null,"0")])])],-1))]),i[51]||(i[51]=a(" such that ")),s("mjx-container",G,[(e(),t("svg",P,i[45]||(i[45]=[n('',1)]))),i[46]||(i[46]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mn",null,"2"),s("msub",null,[s("mi",null,"ω"),s("mn",null,"0")]),s("mo",null,"="),s("msub",null,[s("mi",null,"ω"),s("mn",null,"1")])])],-1))]),i[52]||(i[52]=a(". This is a very important process in quantum optics, since it allows us to generate photons with a frequency in the visible range from photons with a frequency in the infrared range. This is called frequency doubling and is used in many applications, e.g. in laser pointers."))]),i[56]||(i[56]=n(`
',3)),s("p",null,[i[11]||(i[11]=a("If we only have a cubic nonlineariy ")),s("mjx-container",g,[(e(),t("svg",m,i[7]||(i[7]=[s("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[s("g",{"data-mml-node":"math"},[s("g",{"data-mml-node":"mi"},[s("path",{"data-c":"1D6FC",d:"M34 156Q34 270 120 356T309 442Q379 442 421 402T478 304Q484 275 485 237V208Q534 282 560 374Q564 388 566 390T582 393Q603 393 603 385Q603 376 594 346T558 261T497 161L486 147L487 123Q489 67 495 47T514 26Q528 28 540 37T557 60Q559 67 562 68T577 70Q597 70 597 62Q597 56 591 43Q579 19 556 5T512 -10H505Q438 -10 414 62L411 69L400 61Q390 53 370 41T325 18T267 -2T203 -11Q124 -11 79 39T34 156ZM208 26Q257 26 306 47T379 90L403 112Q401 255 396 290Q382 405 304 405Q235 405 183 332Q156 292 139 224T121 120Q121 71 146 49T208 26Z",style:{"stroke-width":"3"}})])])],-1)]))),i[8]||(i[8]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mi",null,"α")])],-1))]),i[12]||(i[12]=a(", we observe the normal duffing oscillator response with no response at ")),s("mjx-container",u,[(e(),t("svg",E,i[9]||(i[9]=[n('',1)]))),i[10]||(i[10]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mn",null,"2"),s("mi",null,"ω")])],-1))]),i[13]||(i[13]=a("."))]),s("p",null,[i[24]||(i[24]=a("We would like to investigate the three-wave mixing of the driven Duffing oscillator. This means we can excite the system resonantly if the oscillation frequencies ")),s("mjx-container",y,[(e(),t("svg",x,i[14]||(i[14]=[n('',1)]))),i[15]||(i[15]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mn",null,"1")])])],-1))]),i[25]||(i[25]=a(" and ")),s("mjx-container",c,[(e(),t("svg",w,i[16]||(i[16]=[n('',1)]))),i[17]||(i[17]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mn",null,"2")])])],-1))]),i[26]||(i[26]=a(" fullfil the conditions ")),s("mjx-container",v,[(e(),t("svg",F,i[18]||(i[18]=[n('',1)]))),i[19]||(i[19]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mn",null,"1")]),s("mo",null,"±"),s("msub",null,[s("mi",null,"ω"),s("mn",null,"2")]),s("mo",null,"="),s("mo",null,"±"),s("msub",null,[s("mi",null,"ω"),s("mn",null,"0")])])],-1))]),i[27]||(i[27]=a(". Here, we will especially focus on the degenerate three wave mixing, where ")),s("mjx-container",f,[(e(),t("svg",C,i[20]||(i[20]=[n('',1)]))),i[21]||(i[21]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mn",null,"2")]),s("mo",null,"="),s("msub",null,[s("mi",null,"ω"),s("mn",null,"0")])])],-1))]),i[28]||(i[28]=a(" such that ")),s("mjx-container",b,[(e(),t("svg",D,i[22]||(i[22]=[n('',1)]))),i[23]||(i[23]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mn",null,"2"),s("msub",null,[s("mi",null,"ω"),s("mn",null,"0")]),s("mo",null,"="),s("msub",null,[s("mi",null,"ω"),s("mn",null,"1")])])],-1))]),i[29]||(i[29]=a(". This is a very important process in quantum optics, since it allows us to generate photons with a frequency in the visible range from photons with a frequency in the infrared range. This is called frequency doubling and is used in many applications, e.g. in laser pointers."))]),i[55]||(i[55]=n(`
',3)),s("p",null,[i[34]||(i[34]=a("If we only have a cubic nonlineariy ")),s("mjx-container",V,[(e(),t("svg",M,i[30]||(i[30]=[s("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[s("g",{"data-mml-node":"math"},[s("g",{"data-mml-node":"mi"},[s("path",{"data-c":"1D6FC",d:"M34 156Q34 270 120 356T309 442Q379 442 421 402T478 304Q484 275 485 237V208Q534 282 560 374Q564 388 566 390T582 393Q603 393 603 385Q603 376 594 346T558 261T497 161L486 147L487 123Q489 67 495 47T514 26Q528 28 540 37T557 60Q559 67 562 68T577 70Q597 70 597 62Q597 56 591 43Q579 19 556 5T512 -10H505Q438 -10 414 62L411 69L400 61Q390 53 370 41T325 18T267 -2T203 -11Q124 -11 79 39T34 156ZM208 26Q257 26 306 47T379 90L403 112Q401 255 396 290Q382 405 304 405Q235 405 183 332Q156 292 139 224T121 120Q121 71 146 49T208 26Z",style:{"stroke-width":"3"}})])])],-1)]))),i[31]||(i[31]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mi",null,"α")])],-1))]),i[35]||(i[35]=a(", we observe the normal duffing oscillator response with no response at ")),s("mjx-container",B,[(e(),t("svg",H,i[32]||(i[32]=[n('',1)]))),i[33]||(i[33]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mn",null,"2"),s("mi",null,"ω")])],-1))]),i[36]||(i[36]=a("."))]),s("p",null,[i[47]||(i[47]=a("We would like to investigate the three-wave mixing of the driven Duffing oscillator. This means we can excite the system resonantly if the oscillation frequencies ")),s("mjx-container",L,[(e(),t("svg",A,i[37]||(i[37]=[n('',1)]))),i[38]||(i[38]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mn",null,"1")])])],-1))]),i[48]||(i[48]=a(" and ")),s("mjx-container",Z,[(e(),t("svg",j,i[39]||(i[39]=[n('',1)]))),i[40]||(i[40]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mn",null,"2")])])],-1))]),i[49]||(i[49]=a(" fullfil the conditions ")),s("mjx-container",q,[(e(),t("svg",z,i[41]||(i[41]=[n('',1)]))),i[42]||(i[42]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mn",null,"1")]),s("mo",null,"±"),s("msub",null,[s("mi",null,"ω"),s("mn",null,"2")]),s("mo",null,"="),s("mo",null,"±"),s("msub",null,[s("mi",null,"ω"),s("mn",null,"0")])])],-1))]),i[50]||(i[50]=a(". Here, we will especially focus on the degenerate three wave mixing, where ")),s("mjx-container",S,[(e(),t("svg",J,i[43]||(i[43]=[n('',1)]))),i[44]||(i[44]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mn",null,"2")]),s("mo",null,"="),s("msub",null,[s("mi",null,"ω"),s("mn",null,"0")])])],-1))]),i[51]||(i[51]=a(" such that ")),s("mjx-container",G,[(e(),t("svg",P,i[45]||(i[45]=[n('',1)]))),i[46]||(i[46]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mn",null,"2"),s("msub",null,[s("mi",null,"ω"),s("mn",null,"0")]),s("mo",null,"="),s("msub",null,[s("mi",null,"ω"),s("mn",null,"1")])])],-1))]),i[52]||(i[52]=a(". This is a very important process in quantum optics, since it allows us to generate photons with a frequency in the visible range from photons with a frequency in the infrared range. This is called frequency doubling and is used in many applications, e.g. in laser pointers."))]),i[56]||(i[56]=n(`
',4))])}const X=l(k,[["render",W]]);export{K as __pageData,X as default};
diff --git a/v0.10.10/assets/frnvjsq.C1saRSuo.png b/v0.10.10/assets/frnvjsq.C1saRSuo.png
new file mode 100644
index 00000000..ae53494e
Binary files /dev/null and b/v0.10.10/assets/frnvjsq.C1saRSuo.png differ
diff --git a/v0.10.10/assets/hfzgltm.DaP9_FvO.png b/v0.10.10/assets/hfzgltm.DaP9_FvO.png
new file mode 100644
index 00000000..93fd4473
Binary files /dev/null and b/v0.10.10/assets/hfzgltm.DaP9_FvO.png differ
diff --git a/v0.10.10/assets/hgawaky.C1mRfhhg.png b/v0.10.10/assets/hgawaky.C1mRfhhg.png
new file mode 100644
index 00000000..996512d7
Binary files /dev/null and b/v0.10.10/assets/hgawaky.C1mRfhhg.png differ
diff --git a/v0.10.10/assets/index.md.Cxsx7fy_.js b/v0.10.10/assets/index.md.Cxsx7fy_.js
new file mode 100644
index 00000000..5aaa5e91
--- /dev/null
+++ b/v0.10.10/assets/index.md.Cxsx7fy_.js
@@ -0,0 +1 @@
+import{_ as e,c as t,o as i}from"./chunks/framework.TrWZWXe1.js";const u=JSON.parse('{"title":"","description":"","frontmatter":{"layout":"home","hero":{"name":"HarmonicBalance.jl","text":"Efficient Floquet expansions for nonlinear driven systems","tagline":"A Julia suite for nonlinear dynamics using harmonic balance","actions":[{"theme":"brand","text":"Getting Started","link":"/introduction"},{"theme":"alt","text":"Tutorials","link":"/tutorials"},{"theme":"alt","text":"View on GitHub","link":"https://github.com/NonlinearOscillations/HarmonicBalance.jl"}],"image":{"src":"/logo.svg","alt":"HarmonicBalance.jl"}},"features":[{"title":"Non-equilibrium steady states","details":"Compute all stationary states in a one or two-dimensional parameter sweep."},{"title":"Linear Response","details":"Explore the fluctuations on top of the non-equilibrium steady states."},{"title":"Limit Cycles","details":"Find limit cycles involving many frequencies."}]},"headers":[],"relativePath":"index.md","filePath":"index.md"}'),a={name:"index.md"};function n(o,s,l,r,c,m){return i(),t("div")}const p=e(a,[["render",n]]);export{u as __pageData,p as default};
diff --git a/v0.10.10/assets/index.md.Cxsx7fy_.lean.js b/v0.10.10/assets/index.md.Cxsx7fy_.lean.js
new file mode 100644
index 00000000..5aaa5e91
--- /dev/null
+++ b/v0.10.10/assets/index.md.Cxsx7fy_.lean.js
@@ -0,0 +1 @@
+import{_ as e,c as t,o as i}from"./chunks/framework.TrWZWXe1.js";const u=JSON.parse('{"title":"","description":"","frontmatter":{"layout":"home","hero":{"name":"HarmonicBalance.jl","text":"Efficient Floquet expansions for nonlinear driven systems","tagline":"A Julia suite for nonlinear dynamics using harmonic balance","actions":[{"theme":"brand","text":"Getting Started","link":"/introduction"},{"theme":"alt","text":"Tutorials","link":"/tutorials"},{"theme":"alt","text":"View on GitHub","link":"https://github.com/NonlinearOscillations/HarmonicBalance.jl"}],"image":{"src":"/logo.svg","alt":"HarmonicBalance.jl"}},"features":[{"title":"Non-equilibrium steady states","details":"Compute all stationary states in a one or two-dimensional parameter sweep."},{"title":"Linear Response","details":"Explore the fluctuations on top of the non-equilibrium steady states."},{"title":"Limit Cycles","details":"Find limit cycles involving many frequencies."}]},"headers":[],"relativePath":"index.md","filePath":"index.md"}'),a={name:"index.md"};function n(o,s,l,r,c,m){return i(),t("div")}const p=e(a,[["render",n]]);export{u as __pageData,p as default};
diff --git a/v0.10.10/assets/inter-italic-cyrillic-ext.r48I6akx.woff2 b/v0.10.10/assets/inter-italic-cyrillic-ext.r48I6akx.woff2
new file mode 100644
index 00000000..b6b603d5
Binary files /dev/null and b/v0.10.10/assets/inter-italic-cyrillic-ext.r48I6akx.woff2 differ
diff --git a/v0.10.10/assets/inter-italic-cyrillic.By2_1cv3.woff2 b/v0.10.10/assets/inter-italic-cyrillic.By2_1cv3.woff2
new file mode 100644
index 00000000..def40a4f
Binary files /dev/null and b/v0.10.10/assets/inter-italic-cyrillic.By2_1cv3.woff2 differ
diff --git a/v0.10.10/assets/inter-italic-greek-ext.1u6EdAuj.woff2 b/v0.10.10/assets/inter-italic-greek-ext.1u6EdAuj.woff2
new file mode 100644
index 00000000..e070c3d3
Binary files /dev/null and b/v0.10.10/assets/inter-italic-greek-ext.1u6EdAuj.woff2 differ
diff --git a/v0.10.10/assets/inter-italic-greek.DJ8dCoTZ.woff2 b/v0.10.10/assets/inter-italic-greek.DJ8dCoTZ.woff2
new file mode 100644
index 00000000..a3c16ca4
Binary files /dev/null and b/v0.10.10/assets/inter-italic-greek.DJ8dCoTZ.woff2 differ
diff --git a/v0.10.10/assets/inter-italic-latin-ext.CN1xVJS-.woff2 b/v0.10.10/assets/inter-italic-latin-ext.CN1xVJS-.woff2
new file mode 100644
index 00000000..2210a899
Binary files /dev/null and b/v0.10.10/assets/inter-italic-latin-ext.CN1xVJS-.woff2 differ
diff --git a/v0.10.10/assets/inter-italic-latin.C2AdPX0b.woff2 b/v0.10.10/assets/inter-italic-latin.C2AdPX0b.woff2
new file mode 100644
index 00000000..790d62dc
Binary files /dev/null and b/v0.10.10/assets/inter-italic-latin.C2AdPX0b.woff2 differ
diff --git a/v0.10.10/assets/inter-italic-vietnamese.BSbpV94h.woff2 b/v0.10.10/assets/inter-italic-vietnamese.BSbpV94h.woff2
new file mode 100644
index 00000000..1eec0775
Binary files /dev/null and b/v0.10.10/assets/inter-italic-vietnamese.BSbpV94h.woff2 differ
diff --git a/v0.10.10/assets/inter-roman-cyrillic-ext.BBPuwvHQ.woff2 b/v0.10.10/assets/inter-roman-cyrillic-ext.BBPuwvHQ.woff2
new file mode 100644
index 00000000..2cfe6153
Binary files /dev/null and b/v0.10.10/assets/inter-roman-cyrillic-ext.BBPuwvHQ.woff2 differ
diff --git a/v0.10.10/assets/inter-roman-cyrillic.C5lxZ8CY.woff2 b/v0.10.10/assets/inter-roman-cyrillic.C5lxZ8CY.woff2
new file mode 100644
index 00000000..e3886dd1
Binary files /dev/null and b/v0.10.10/assets/inter-roman-cyrillic.C5lxZ8CY.woff2 differ
diff --git a/v0.10.10/assets/inter-roman-greek-ext.CqjqNYQ-.woff2 b/v0.10.10/assets/inter-roman-greek-ext.CqjqNYQ-.woff2
new file mode 100644
index 00000000..36d67487
Binary files /dev/null and b/v0.10.10/assets/inter-roman-greek-ext.CqjqNYQ-.woff2 differ
diff --git a/v0.10.10/assets/inter-roman-greek.BBVDIX6e.woff2 b/v0.10.10/assets/inter-roman-greek.BBVDIX6e.woff2
new file mode 100644
index 00000000..2bed1e85
Binary files /dev/null and b/v0.10.10/assets/inter-roman-greek.BBVDIX6e.woff2 differ
diff --git a/v0.10.10/assets/inter-roman-latin-ext.4ZJIpNVo.woff2 b/v0.10.10/assets/inter-roman-latin-ext.4ZJIpNVo.woff2
new file mode 100644
index 00000000..9a8d1e2b
Binary files /dev/null and b/v0.10.10/assets/inter-roman-latin-ext.4ZJIpNVo.woff2 differ
diff --git a/v0.10.10/assets/inter-roman-latin.Di8DUHzh.woff2 b/v0.10.10/assets/inter-roman-latin.Di8DUHzh.woff2
new file mode 100644
index 00000000..07d3c53a
Binary files /dev/null and b/v0.10.10/assets/inter-roman-latin.Di8DUHzh.woff2 differ
diff --git a/v0.10.10/assets/inter-roman-vietnamese.BjW4sHH5.woff2 b/v0.10.10/assets/inter-roman-vietnamese.BjW4sHH5.woff2
new file mode 100644
index 00000000..57bdc22a
Binary files /dev/null and b/v0.10.10/assets/inter-roman-vietnamese.BjW4sHH5.woff2 differ
diff --git a/v0.10.10/assets/introduction_citation.md.BVu8Y5if.js b/v0.10.10/assets/introduction_citation.md.BVu8Y5if.js
new file mode 100644
index 00000000..3835a0f0
--- /dev/null
+++ b/v0.10.10/assets/introduction_citation.md.BVu8Y5if.js
@@ -0,0 +1 @@
+import{_ as e,c as a,a4 as o,o as i}from"./chunks/framework.TrWZWXe1.js";const u=JSON.parse('{"title":"Citation","description":"","frontmatter":{},"headers":[],"relativePath":"introduction/citation.md","filePath":"introduction/citation.md"}'),n={name:"introduction/citation.md"};function r(s,t,c,l,d,p){return i(),a("div",null,t[0]||(t[0]=[o('
If you use HarmonicBalance.jl in your project, we kindly ask you to cite this paper, namely:
HarmonicBalance.jl: A Julia suite for nonlinear dynamics using harmonic balance, Jan Košata, Javier del Pino, Toni L. Heugel, Oded Zilberberg, SciPost Phys. Codebases 6 (2022)
The limit cycle finding algorithm is based on the work of this paper:
Limit cycles as stationary states of an extended harmonic balance ansatz J. del Pino, J. Košata, and O. Zilberberg, Phys. Rev. Res. 6, 033180 (2024).
',5)]))}const m=e(n,[["render",r]]);export{u as __pageData,m as default};
diff --git a/v0.10.10/assets/introduction_citation.md.BVu8Y5if.lean.js b/v0.10.10/assets/introduction_citation.md.BVu8Y5if.lean.js
new file mode 100644
index 00000000..3835a0f0
--- /dev/null
+++ b/v0.10.10/assets/introduction_citation.md.BVu8Y5if.lean.js
@@ -0,0 +1 @@
+import{_ as e,c as a,a4 as o,o as i}from"./chunks/framework.TrWZWXe1.js";const u=JSON.parse('{"title":"Citation","description":"","frontmatter":{},"headers":[],"relativePath":"introduction/citation.md","filePath":"introduction/citation.md"}'),n={name:"introduction/citation.md"};function r(s,t,c,l,d,p){return i(),a("div",null,t[0]||(t[0]=[o('
If you use HarmonicBalance.jl in your project, we kindly ask you to cite this paper, namely:
HarmonicBalance.jl: A Julia suite for nonlinear dynamics using harmonic balance, Jan Košata, Javier del Pino, Toni L. Heugel, Oded Zilberberg, SciPost Phys. Codebases 6 (2022)
The limit cycle finding algorithm is based on the work of this paper:
Limit cycles as stationary states of an extended harmonic balance ansatz J. del Pino, J. Košata, and O. Zilberberg, Phys. Rev. Res. 6, 033180 (2024).
',5)]))}const m=e(n,[["render",r]]);export{u as __pageData,m as default};
diff --git a/v0.10.10/assets/introduction_index.md.CWSZasC1.js b/v0.10.10/assets/introduction_index.md.CWSZasC1.js
new file mode 100644
index 00000000..de4c5c2d
--- /dev/null
+++ b/v0.10.10/assets/introduction_index.md.CWSZasC1.js
@@ -0,0 +1,21 @@
+import{_ as i,c as s,a4 as Q,j as a,o as T}from"./chunks/framework.TrWZWXe1.js";const e="/HarmonicBalance.jl/v0.10.10/assets/oxznusu.B1eISI2b.png",V=JSON.parse('{"title":"Installation","description":"","frontmatter":{},"headers":[],"relativePath":"introduction/index.md","filePath":"introduction/index.md"}'),n={name:"introduction/index.md"},l={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},h={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-4.03ex"},xmlns:"http://www.w3.org/2000/svg",width:"48.629ex",height:"6.03ex",role:"img",focusable:"false",viewBox:"0 -883.9 21494.2 2665.1","aria-hidden":"true"};function d(r,t,p,o,k,m){return T(),s("div",null,[t[2]||(t[2]=Q(`
It is easy to install HarmonicBalance.jl as we are registered in the Julia General registry. You can simply run the following command in the Julia REPL:
julia
julia> using Pkg
+julia> Pkg.add("HarmonicBalance")
or
julia
julia> ] # \`]\` should be pressed
+julia> Pkg.add("HarmonicBalance")
You can check which version you have installled with the command
using HarmonicBalance
+@variables α ω ω0 F t η x(t) # declare constant variables and a function x(t)
+eom = d(x,t,2) + ω0^2*x + α*x^3 + η*d(x,t)*x^2 ~ F*cos(ω*t)
+diff_eq = DifferentialEquation(eom, x)
+add_harmonic!(diff_eq, x, ω) # specify the ansatz x = u(T) cos(ωt) + v(T) sin(ωt)
+
+# implement ansatz to get harmonic equations
+harmonic_eq = get_harmonic_equations(diff_eq)
+
+fixed = (α => 1.0, ω0 => 1.0, F => 0.01, η => 0.1) # fixed parameters
+varied = ω => range(0.9, 1.2, 100) # range of parameter values
+result = get_steady_states(harmonic_eq, varied, fixed)
A steady state result for 100 parameter points
+
+Solution branches: 3
+ of which real: 3
+ of which stable: 2
+
+Classes: stable, physical, Hopf, binary_labels
The obtained steady states can be plotted as a function of the driving frequency:
julia
plot(result, "sqrt(u1^2 + v1^2)")
If you want learn more on what you can do with HarmonicBalance.jl, check out the tutorials. We also have collected some examples of different physical systems.
',6))])}const g=i(n,[["render",d]]);export{V as __pageData,g as default};
diff --git a/v0.10.10/assets/introduction_index.md.CWSZasC1.lean.js b/v0.10.10/assets/introduction_index.md.CWSZasC1.lean.js
new file mode 100644
index 00000000..de4c5c2d
--- /dev/null
+++ b/v0.10.10/assets/introduction_index.md.CWSZasC1.lean.js
@@ -0,0 +1,21 @@
+import{_ as i,c as s,a4 as Q,j as a,o as T}from"./chunks/framework.TrWZWXe1.js";const e="/HarmonicBalance.jl/v0.10.10/assets/oxznusu.B1eISI2b.png",V=JSON.parse('{"title":"Installation","description":"","frontmatter":{},"headers":[],"relativePath":"introduction/index.md","filePath":"introduction/index.md"}'),n={name:"introduction/index.md"},l={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},h={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-4.03ex"},xmlns:"http://www.w3.org/2000/svg",width:"48.629ex",height:"6.03ex",role:"img",focusable:"false",viewBox:"0 -883.9 21494.2 2665.1","aria-hidden":"true"};function d(r,t,p,o,k,m){return T(),s("div",null,[t[2]||(t[2]=Q(`
It is easy to install HarmonicBalance.jl as we are registered in the Julia General registry. You can simply run the following command in the Julia REPL:
julia
julia> using Pkg
+julia> Pkg.add("HarmonicBalance")
or
julia
julia> ] # \`]\` should be pressed
+julia> Pkg.add("HarmonicBalance")
You can check which version you have installled with the command
using HarmonicBalance
+@variables α ω ω0 F t η x(t) # declare constant variables and a function x(t)
+eom = d(x,t,2) + ω0^2*x + α*x^3 + η*d(x,t)*x^2 ~ F*cos(ω*t)
+diff_eq = DifferentialEquation(eom, x)
+add_harmonic!(diff_eq, x, ω) # specify the ansatz x = u(T) cos(ωt) + v(T) sin(ωt)
+
+# implement ansatz to get harmonic equations
+harmonic_eq = get_harmonic_equations(diff_eq)
+
+fixed = (α => 1.0, ω0 => 1.0, F => 0.01, η => 0.1) # fixed parameters
+varied = ω => range(0.9, 1.2, 100) # range of parameter values
+result = get_steady_states(harmonic_eq, varied, fixed)
A steady state result for 100 parameter points
+
+Solution branches: 3
+ of which real: 3
+ of which stable: 2
+
+Classes: stable, physical, Hopf, binary_labels
The obtained steady states can be plotted as a function of the driving frequency:
julia
plot(result, "sqrt(u1^2 + v1^2)")
If you want learn more on what you can do with HarmonicBalance.jl, check out the tutorials. We also have collected some examples of different physical systems.
',6))])}const g=i(n,[["render",d]]);export{V as __pageData,g as default};
diff --git a/v0.10.10/assets/introduction_resources.md.dY1QAXnW.js b/v0.10.10/assets/introduction_resources.md.dY1QAXnW.js
new file mode 100644
index 00000000..7c44fa1a
--- /dev/null
+++ b/v0.10.10/assets/introduction_resources.md.dY1QAXnW.js
@@ -0,0 +1 @@
+import{_ as e,c as t,o as r}from"./chunks/framework.TrWZWXe1.js";const _=JSON.parse('{"title":"","description":"","frontmatter":{},"headers":[],"relativePath":"introduction/resources.md","filePath":"introduction/resources.md"}'),o={name:"introduction/resources.md"};function s(c,n,a,i,d,p){return r(),t("div")}const m=e(o,[["render",s]]);export{_ as __pageData,m as default};
diff --git a/v0.10.10/assets/introduction_resources.md.dY1QAXnW.lean.js b/v0.10.10/assets/introduction_resources.md.dY1QAXnW.lean.js
new file mode 100644
index 00000000..7c44fa1a
--- /dev/null
+++ b/v0.10.10/assets/introduction_resources.md.dY1QAXnW.lean.js
@@ -0,0 +1 @@
+import{_ as e,c as t,o as r}from"./chunks/framework.TrWZWXe1.js";const _=JSON.parse('{"title":"","description":"","frontmatter":{},"headers":[],"relativePath":"introduction/resources.md","filePath":"introduction/resources.md"}'),o={name:"introduction/resources.md"};function s(c,n,a,i,d,p){return r(),t("div")}const m=e(o,[["render",s]]);export{_ as __pageData,m as default};
diff --git a/v0.10.10/assets/kdaqeyg.y7rNhHvU.png b/v0.10.10/assets/kdaqeyg.y7rNhHvU.png
new file mode 100644
index 00000000..5f144b35
Binary files /dev/null and b/v0.10.10/assets/kdaqeyg.y7rNhHvU.png differ
diff --git a/v0.10.10/assets/lqzeigs.DzS6ncvi.png b/v0.10.10/assets/lqzeigs.DzS6ncvi.png
new file mode 100644
index 00000000..58b00bfe
Binary files /dev/null and b/v0.10.10/assets/lqzeigs.DzS6ncvi.png differ
diff --git a/v0.10.10/assets/ltfrlnq.TE4cNA4T.png b/v0.10.10/assets/ltfrlnq.TE4cNA4T.png
new file mode 100644
index 00000000..11573aea
Binary files /dev/null and b/v0.10.10/assets/ltfrlnq.TE4cNA4T.png differ
diff --git a/v0.10.10/assets/mamyecy.2MzQm7AU.png b/v0.10.10/assets/mamyecy.2MzQm7AU.png
new file mode 100644
index 00000000..d8ec9d0d
Binary files /dev/null and b/v0.10.10/assets/mamyecy.2MzQm7AU.png differ
diff --git a/v0.10.10/assets/manual_Krylov-Bogoliubov_method.md.g8YGi5oI.js b/v0.10.10/assets/manual_Krylov-Bogoliubov_method.md.g8YGi5oI.js
new file mode 100644
index 00000000..0a87bbe0
--- /dev/null
+++ b/v0.10.10/assets/manual_Krylov-Bogoliubov_method.md.g8YGi5oI.js
@@ -0,0 +1,29 @@
+import{_ as h,c as t,j as i,a,a4 as n,G as k,B as p,o as e}from"./chunks/framework.TrWZWXe1.js";const C=JSON.parse('{"title":"Krylov-Bogoliubov Averaging Method","description":"","frontmatter":{},"headers":[],"relativePath":"manual/Krylov-Bogoliubov_method.md","filePath":"manual/Krylov-Bogoliubov_method.md"}'),r={name:"manual/Krylov-Bogoliubov_method.md"},o={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},d={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"3.67ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 1622 1000","aria-hidden":"true"},g={class:"jldocstring custom-block",open:""};function E(y,s,c,F,m,u){const l=p("Badge");return e(),t("div",null,[s[11]||(s[11]=i("h1",{id:"Krylov-Bogoliubov",tabindex:"-1"},[a("Krylov-Bogoliubov Averaging Method "),i("a",{class:"header-anchor",href:"#Krylov-Bogoliubov","aria-label":'Permalink to "Krylov-Bogoliubov Averaging Method {#Krylov-Bogoliubov}"'},"")],-1)),i("p",null,[s[2]||(s[2]=a("The Krylov-Bogoliubov averaging method is an alternative high-frequency expansion technique used to analyze dynamical systems. Unlike the ")),s[3]||(s[3]=i("a",{href:"https://en.wikipedia.org/wiki/Harmonic_balance",target:"_blank",rel:"noreferrer"},"Harmonic Balance method",-1)),s[4]||(s[4]=a(", which is detailed in the ")),s[5]||(s[5]=i("a",{href:"/HarmonicBalance.jl/v0.10.10/background/harmonic_balance#intro_hb"},"background section",-1)),s[6]||(s[6]=a(", the Krylov-Bogoliubov method excels in computing higher orders in ")),i("mjx-container",o,[(e(),t("svg",d,s[0]||(s[0]=[n('',1)]))),s[1]||(s[1]=i("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[i("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[i("mn",null,"1"),i("mrow",{"data-mjx-texclass":"ORD"},[i("mo",null,"/")]),i("mi",null,"ω")])],-1))]),s[7]||(s[7]=a(", enabling the capture of faster dynamics within a system."))]),s[12]||(s[12]=n('
The primary advantage of the Krylov-Bogoliubov method lies in its ability to delve deeper into high-frequency components, allowing a more comprehensive understanding of fast dynamical behaviors. By leveraging this technique, one can obtain higher-order approximations that shed light on intricate system dynamics.
However, it's essential to note a limitation: this method cannot handle multiple harmonics within a single variable, unlike some other high-frequency expansion methods.
To compute the Krylov-Bogoliubov averaging method within your system, utilize the function get_krylov_equations. This function is designed specifically to implement the methodology and derive the equations necessary to analyze the system dynamics using this technique.
Apply the Krylov-Bogoliubov averaging method to a specific order to obtain a set of ODEs (the slow-flow equations) governing the harmonics of diff_eom.
The harmonics evolve in slow_time, the oscillating terms themselves in fast_time. If no input is used, a variable T is defined for slow_time and fast_time is taken as the independent variable of diff_eom.
Krylov-Bogoliubov averaging method can be applied up to order = 2.
Example
julia
julia> @variables t, x(t), ω0, ω, F;
+
+# enter the simple harmonic oscillator
+julia> diff_eom = DifferentialEquation( d(x,t,2) + ω0^2 * x ~ F *cos(ω*t), x);
+
+# expand x in the harmonic ω
+julia> add_harmonic!(diff_eom, x, ω);
+
+# get equations for the harmonics evolving in the slow time T to first order
+julia> harmonic_eom = get_krylov_equations(diff_eom, order = 1)
+
+A set of 2 harmonic equations
+Variables: u1(T), v1(T)
+Parameters: ω, F, ω0
+
+Harmonic ansatz:
+xˍt(t) =
+x(t) = u1(T)*cos(ωt) + v1(T)*sin(ωt)
+
+Harmonic equations:
+
+((1//2)*(ω^2)*v1(T) - (1//2)*(ω0^2)*v1(T)) / ω ~ Differential(T)(u1(T))
+
+((1//2)*(ω0^2)*u1(T) - (1//2)*F - (1//2)*(ω^2)*u1(T)) / ω ~ Differential(T)(v1(T))
`,7))]),s[13]||(s[13]=i("p",null,[a("For further information and a detailed understanding of this method, refer to "),i("a",{href:"https://en.wikipedia.org/wiki/Krylov%E2%80%93Bogoliubov_averaging_method",target:"_blank",rel:"noreferrer"},"Krylov-Bogoliubov averaging method on Wikipedia"),a(".")],-1))])}const f=h(r,[["render",E]]);export{C as __pageData,f as default};
diff --git a/v0.10.10/assets/manual_Krylov-Bogoliubov_method.md.g8YGi5oI.lean.js b/v0.10.10/assets/manual_Krylov-Bogoliubov_method.md.g8YGi5oI.lean.js
new file mode 100644
index 00000000..0a87bbe0
--- /dev/null
+++ b/v0.10.10/assets/manual_Krylov-Bogoliubov_method.md.g8YGi5oI.lean.js
@@ -0,0 +1,29 @@
+import{_ as h,c as t,j as i,a,a4 as n,G as k,B as p,o as e}from"./chunks/framework.TrWZWXe1.js";const C=JSON.parse('{"title":"Krylov-Bogoliubov Averaging Method","description":"","frontmatter":{},"headers":[],"relativePath":"manual/Krylov-Bogoliubov_method.md","filePath":"manual/Krylov-Bogoliubov_method.md"}'),r={name:"manual/Krylov-Bogoliubov_method.md"},o={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},d={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"3.67ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 1622 1000","aria-hidden":"true"},g={class:"jldocstring custom-block",open:""};function E(y,s,c,F,m,u){const l=p("Badge");return e(),t("div",null,[s[11]||(s[11]=i("h1",{id:"Krylov-Bogoliubov",tabindex:"-1"},[a("Krylov-Bogoliubov Averaging Method "),i("a",{class:"header-anchor",href:"#Krylov-Bogoliubov","aria-label":'Permalink to "Krylov-Bogoliubov Averaging Method {#Krylov-Bogoliubov}"'},"")],-1)),i("p",null,[s[2]||(s[2]=a("The Krylov-Bogoliubov averaging method is an alternative high-frequency expansion technique used to analyze dynamical systems. Unlike the ")),s[3]||(s[3]=i("a",{href:"https://en.wikipedia.org/wiki/Harmonic_balance",target:"_blank",rel:"noreferrer"},"Harmonic Balance method",-1)),s[4]||(s[4]=a(", which is detailed in the ")),s[5]||(s[5]=i("a",{href:"/HarmonicBalance.jl/v0.10.10/background/harmonic_balance#intro_hb"},"background section",-1)),s[6]||(s[6]=a(", the Krylov-Bogoliubov method excels in computing higher orders in ")),i("mjx-container",o,[(e(),t("svg",d,s[0]||(s[0]=[n('',1)]))),s[1]||(s[1]=i("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[i("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[i("mn",null,"1"),i("mrow",{"data-mjx-texclass":"ORD"},[i("mo",null,"/")]),i("mi",null,"ω")])],-1))]),s[7]||(s[7]=a(", enabling the capture of faster dynamics within a system."))]),s[12]||(s[12]=n('
The primary advantage of the Krylov-Bogoliubov method lies in its ability to delve deeper into high-frequency components, allowing a more comprehensive understanding of fast dynamical behaviors. By leveraging this technique, one can obtain higher-order approximations that shed light on intricate system dynamics.
However, it's essential to note a limitation: this method cannot handle multiple harmonics within a single variable, unlike some other high-frequency expansion methods.
To compute the Krylov-Bogoliubov averaging method within your system, utilize the function get_krylov_equations. This function is designed specifically to implement the methodology and derive the equations necessary to analyze the system dynamics using this technique.
Apply the Krylov-Bogoliubov averaging method to a specific order to obtain a set of ODEs (the slow-flow equations) governing the harmonics of diff_eom.
The harmonics evolve in slow_time, the oscillating terms themselves in fast_time. If no input is used, a variable T is defined for slow_time and fast_time is taken as the independent variable of diff_eom.
Krylov-Bogoliubov averaging method can be applied up to order = 2.
Example
julia
julia> @variables t, x(t), ω0, ω, F;
+
+# enter the simple harmonic oscillator
+julia> diff_eom = DifferentialEquation( d(x,t,2) + ω0^2 * x ~ F *cos(ω*t), x);
+
+# expand x in the harmonic ω
+julia> add_harmonic!(diff_eom, x, ω);
+
+# get equations for the harmonics evolving in the slow time T to first order
+julia> harmonic_eom = get_krylov_equations(diff_eom, order = 1)
+
+A set of 2 harmonic equations
+Variables: u1(T), v1(T)
+Parameters: ω, F, ω0
+
+Harmonic ansatz:
+xˍt(t) =
+x(t) = u1(T)*cos(ωt) + v1(T)*sin(ωt)
+
+Harmonic equations:
+
+((1//2)*(ω^2)*v1(T) - (1//2)*(ω0^2)*v1(T)) / ω ~ Differential(T)(u1(T))
+
+((1//2)*(ω0^2)*u1(T) - (1//2)*F - (1//2)*(ω^2)*u1(T)) / ω ~ Differential(T)(v1(T))
`,7))]),s[13]||(s[13]=i("p",null,[a("For further information and a detailed understanding of this method, refer to "),i("a",{href:"https://en.wikipedia.org/wiki/Krylov%E2%80%93Bogoliubov_averaging_method",target:"_blank",rel:"noreferrer"},"Krylov-Bogoliubov averaging method on Wikipedia"),a(".")],-1))])}const f=h(r,[["render",E]]);export{C as __pageData,f as default};
diff --git a/v0.10.10/assets/manual_entering_eom.md.DRq7l94o.js b/v0.10.10/assets/manual_entering_eom.md.DRq7l94o.js
new file mode 100644
index 00000000..2eda6d5b
--- /dev/null
+++ b/v0.10.10/assets/manual_entering_eom.md.DRq7l94o.js
@@ -0,0 +1,18 @@
+import{_ as e,c as h,j as s,a,G as t,a4 as l,B as k,o as p}from"./chunks/framework.TrWZWXe1.js";const C=JSON.parse('{"title":"Entering equations of motion","description":"","frontmatter":{},"headers":[],"relativePath":"manual/entering_eom.md","filePath":"manual/entering_eom.md"}'),r={name:"manual/entering_eom.md"},d={class:"jldocstring custom-block",open:""},E={class:"jldocstring custom-block",open:""},o={class:"jldocstring custom-block",open:""},g={class:"jldocstring custom-block",open:""};function y(c,i,F,u,f,m){const n=k("Badge");return p(),h("div",null,[i[12]||(i[12]=s("h1",{id:"Entering-equations-of-motion",tabindex:"-1"},[a("Entering equations of motion "),s("a",{class:"header-anchor",href:"#Entering-equations-of-motion","aria-label":'Permalink to "Entering equations of motion {#Entering-equations-of-motion}"'},"")],-1)),i[13]||(i[13]=s("p",null,[a("The struct "),s("code",null,"DifferentialEquation"),a(" is the primary input method; it holds an ODE or a coupled system of ODEs composed of terms with harmonic time-dependence The dependent variables are specified during input, any other symbols are identified as parameters. Information on which variable is to be expanded in which harmonic is specified using "),s("code",null,"add_harmonic!"),a(".")],-1)),i[14]||(i[14]=s("p",null,[s("code",null,"DifferentialEquation.equations"),a(" stores a dictionary assigning variables to equations. This information is necessary because the harmonics belonging to a variable are later used to Fourier-transform its corresponding ODE.")],-1)),s("details",d,[s("summary",null,[i[0]||(i[0]=s("a",{id:"HarmonicBalance.DifferentialEquation",href:"#HarmonicBalance.DifferentialEquation"},[s("span",{class:"jlbinding"},"HarmonicBalance.DifferentialEquation")],-1)),i[1]||(i[1]=a()),t(n,{type:"info",class:"jlObjectType jlType",text:"Type"})]),i[2]||(i[2]=l(`
julia
mutable struct DifferentialEquation
Holds differential equation(s) of motion and a set of harmonics to expand each variable. This is the primary input for HarmonicBalance.jl ; after inputting the equations, the harmonics ansatz needs to be specified using add_harmonic!.
Fields
equations::OrderedCollections.OrderedDict{Num, Equation}: Assigns to each variable an equation of motion.
harmonics::OrderedCollections.OrderedDict{Num, OrderedCollections.OrderedSet{Num}}: Assigns to each variable a set of harmonics.
Example
julia
julia> @variables t, x(t), y(t), ω0, ω, F, k;
+
+# equivalent ways to enter the simple harmonic oscillator
+julia> DifferentialEquation(d(x,t,2) + ω0^2 * x - F * cos(ω*t), x);
+julia> DifferentialEquation(d(x,t,2) + ω0^2 * x ~ F * cos(ω*t), x);
+
+# two coupled oscillators, one of them driven
+julia> DifferentialEquation([d(x,t,2) + ω0^2 * x - k*y, d(y,t,2) + ω0^2 * y - k*x] .~ [F * cos(ω*t), 0], [x,y]);
`,3))])])}const D=e(r,[["render",y]]);export{C as __pageData,D as default};
diff --git a/v0.10.10/assets/manual_entering_eom.md.DRq7l94o.lean.js b/v0.10.10/assets/manual_entering_eom.md.DRq7l94o.lean.js
new file mode 100644
index 00000000..2eda6d5b
--- /dev/null
+++ b/v0.10.10/assets/manual_entering_eom.md.DRq7l94o.lean.js
@@ -0,0 +1,18 @@
+import{_ as e,c as h,j as s,a,G as t,a4 as l,B as k,o as p}from"./chunks/framework.TrWZWXe1.js";const C=JSON.parse('{"title":"Entering equations of motion","description":"","frontmatter":{},"headers":[],"relativePath":"manual/entering_eom.md","filePath":"manual/entering_eom.md"}'),r={name:"manual/entering_eom.md"},d={class:"jldocstring custom-block",open:""},E={class:"jldocstring custom-block",open:""},o={class:"jldocstring custom-block",open:""},g={class:"jldocstring custom-block",open:""};function y(c,i,F,u,f,m){const n=k("Badge");return p(),h("div",null,[i[12]||(i[12]=s("h1",{id:"Entering-equations-of-motion",tabindex:"-1"},[a("Entering equations of motion "),s("a",{class:"header-anchor",href:"#Entering-equations-of-motion","aria-label":'Permalink to "Entering equations of motion {#Entering-equations-of-motion}"'},"")],-1)),i[13]||(i[13]=s("p",null,[a("The struct "),s("code",null,"DifferentialEquation"),a(" is the primary input method; it holds an ODE or a coupled system of ODEs composed of terms with harmonic time-dependence The dependent variables are specified during input, any other symbols are identified as parameters. Information on which variable is to be expanded in which harmonic is specified using "),s("code",null,"add_harmonic!"),a(".")],-1)),i[14]||(i[14]=s("p",null,[s("code",null,"DifferentialEquation.equations"),a(" stores a dictionary assigning variables to equations. This information is necessary because the harmonics belonging to a variable are later used to Fourier-transform its corresponding ODE.")],-1)),s("details",d,[s("summary",null,[i[0]||(i[0]=s("a",{id:"HarmonicBalance.DifferentialEquation",href:"#HarmonicBalance.DifferentialEquation"},[s("span",{class:"jlbinding"},"HarmonicBalance.DifferentialEquation")],-1)),i[1]||(i[1]=a()),t(n,{type:"info",class:"jlObjectType jlType",text:"Type"})]),i[2]||(i[2]=l(`
julia
mutable struct DifferentialEquation
Holds differential equation(s) of motion and a set of harmonics to expand each variable. This is the primary input for HarmonicBalance.jl ; after inputting the equations, the harmonics ansatz needs to be specified using add_harmonic!.
Fields
equations::OrderedCollections.OrderedDict{Num, Equation}: Assigns to each variable an equation of motion.
harmonics::OrderedCollections.OrderedDict{Num, OrderedCollections.OrderedSet{Num}}: Assigns to each variable a set of harmonics.
Example
julia
julia> @variables t, x(t), y(t), ω0, ω, F, k;
+
+# equivalent ways to enter the simple harmonic oscillator
+julia> DifferentialEquation(d(x,t,2) + ω0^2 * x - F * cos(ω*t), x);
+julia> DifferentialEquation(d(x,t,2) + ω0^2 * x ~ F * cos(ω*t), x);
+
+# two coupled oscillators, one of them driven
+julia> DifferentialEquation([d(x,t,2) + ω0^2 * x - k*y, d(y,t,2) + ω0^2 * y - k*x] .~ [F * cos(ω*t), 0], [x,y]);
Once a DifferentialEquation is defined and its harmonics specified, one can extract the harmonic equations using get_harmonic_equations, which itself is composed of the subroutines harmonic_ansatz, slow_flow, fourier_transform! and drop_powers.
The harmonic equations use an additional time variable specified as slow_time in get_harmonic_equations. This is essentially a label distinguishing the time dependence of the harmonic variables (expected to be slow) from that of the oscillating terms (expeted to be fast). When the equations are Fourier-transformed to remove oscillating terms, slow_time is treated as a constant. Such an approach is exact when looking for steady states.
Apply the harmonic ansatz, followed by the slow-flow, Fourier transform and dropping higher-order derivatives to obtain a set of ODEs (the harmonic equations) governing the harmonics of diff_eom.
The harmonics evolve in slow_time, the oscillating terms themselves in fast_time. If no input is used, a variable T is defined for slow_time and fast_time is taken as the independent variable of diff_eom.
By default, all products of order > 1 of slow_time-derivatives are dropped, which means the equations are linear in the time-derivatives.
Example
julia
julia> @variables t, x(t), ω0, ω, F;
+
+# enter the simple harmonic oscillator
+julia> diff_eom = DifferentialEquation( d(x,t,2) + ω0^2 * x ~ F *cos(ω*t), x);
+
+# expand x in the harmonic ω
+julia> add_harmonic!(diff_eom, x, ω);
+
+# get equations for the harmonics evolving in the slow time T
+julia> harmonic_eom = get_harmonic_equations(diff_eom)
+
+A set of 2 harmonic equations
+Variables: u1(T), v1(T)
+Parameters: ω0, ω, F
+
+Harmonic ansatz:
+x(t) = u1*cos(ωt) + v1*sin(ωt)
+
+Harmonic equations:
+
+(ω0^2)*u1(T) + (2//1)*ω*Differential(T)(v1(T)) - (ω^2)*u1(T) ~ F
+
+(ω0^2)*v1(T) - (ω^2)*v1(T) - (2//1)*ω*Differential(T)(u1(T)) ~ 0
Expand each variable of diff_eom using the harmonics assigned to it with time as the time variable. For each harmonic of each variable, instance(s) of HarmonicVariable are automatically created and named.
Extract the Fourier components of eom corresponding to the harmonics specified in eom.variables. For each non-zero harmonic of each variable, 2 equations are generated (cos and sin Fourier coefficients). For each zero (constant) harmonic, 1 equation is generated time does not appear in the resulting equations anymore.
Underlying assumption: all time-dependences are harmonic.
`,5))]),a[57]||(a[57]=s("h2",{id:"HarmonicVariable-and-HarmonicEquation-types",tabindex:"-1"},[i("HarmonicVariable and HarmonicEquation types "),s("a",{class:"header-anchor",href:"#HarmonicVariable-and-HarmonicEquation-types","aria-label":'Permalink to "HarmonicVariable and HarmonicEquation types {#HarmonicVariable-and-HarmonicEquation-types}"'},"")],-1)),s("p",null,[a[25]||(a[25]=i("The equations governing the harmonics are stored using the two following structs. When going from the original to the harmonic equations, the harmonic ansatz ")),s("mjx-container",g,[(n(),e("svg",c,a[15]||(a[15]=[t('',1)]))),a[16]||(a[16]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"x"),s("mi",null,"i")]),s("mo",{stretchy:"false"},"("),s("mi",null,"t"),s("mo",{stretchy:"false"},")"),s("mo",null,"="),s("munderover",null,[s("mo",{"data-mjx-texclass":"OP"},"∑"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",null,"j"),s("mo",null,"="),s("mn",null,"1")]),s("mi",null,"M")]),s("msub",null,[s("mi",null,"u"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",null,"i"),s("mo",null,","),s("mi",null,"j")])]),s("mo",{stretchy:"false"},"("),s("mi",null,"T"),s("mo",{stretchy:"false"},")"),s("mi",null,"cos"),s("mo",{"data-mjx-texclass":"NONE"},""),s("mo",{stretchy:"false"},"("),s("msub",null,[s("mi",null,"ω"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",null,"i"),s("mo",null,","),s("mi",null,"j")])]),s("mi",null,"t"),s("mo",{stretchy:"false"},")"),s("mo",null,"+"),s("msub",null,[s("mi",null,"v"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",null,"i"),s("mo",null,","),s("mi",null,"j")])]),s("mo",{stretchy:"false"},"("),s("mi",null,"T"),s("mo",{stretchy:"false"},")"),s("mi",null,"sin"),s("mo",{"data-mjx-texclass":"NONE"},""),s("mo",{stretchy:"false"},"("),s("msub",null,[s("mi",null,"ω"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",null,"i"),s("mo",null,","),s("mi",null,"j")])]),s("mi",null,"t"),s("mo",{stretchy:"false"},")")])],-1))]),a[26]||(a[26]=i(" is used. Internally, each pair ")),s("mjx-container",u,[(n(),e("svg",y,a[17]||(a[17]=[t('',1)]))),a[18]||(a[18]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mo",{stretchy:"false"},"("),s("msub",null,[s("mi",null,"u"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",null,"i"),s("mo",null,","),s("mi",null,"j")])]),s("mo",null,","),s("msub",null,[s("mi",null,"v"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",null,"i"),s("mo",null,","),s("mi",null,"j")])]),s("mo",{stretchy:"false"},")")])],-1))]),a[27]||(a[27]=i(" is stored as a ")),a[28]||(a[28]=s("code",null,"HarmonicVariable",-1)),a[29]||(a[29]=i(". This includes the identification of ")),s("mjx-container",E,[(n(),e("svg",f,a[19]||(a[19]=[t('',1)]))),a[20]||(a[20]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",null,"i"),s("mo",null,","),s("mi",null,"j")])])])],-1))]),a[30]||(a[30]=i(" and ")),s("mjx-container",x,[(n(),e("svg",b,a[21]||(a[21]=[t('',1)]))),a[22]||(a[22]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"x"),s("mi",null,"i")]),s("mo",{stretchy:"false"},"("),s("mi",null,"t"),s("mo",{stretchy:"false"},")")])],-1))]),a[31]||(a[31]=i(", which is needed to later reconstruct ")),s("mjx-container",w,[(n(),e("svg",H,a[23]||(a[23]=[t('',1)]))),a[24]||(a[24]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"x"),s("mi",null,"i")]),s("mo",{stretchy:"false"},"("),s("mi",null,"t"),s("mo",{stretchy:"false"},")")])],-1))]),a[32]||(a[32]=i("."))]),s("details",F,[s("summary",null,[a[33]||(a[33]=s("a",{id:"HarmonicBalance.HarmonicVariable",href:"#HarmonicBalance.HarmonicVariable"},[s("span",{class:"jlbinding"},"HarmonicBalance.HarmonicVariable")],-1)),a[34]||(a[34]=i()),o(l,{type:"info",class:"jlObjectType jlType",text:"Type"})]),a[35]||(a[35]=t('
julia
mutable struct HarmonicVariable
Holds a variable stored under symbol describing the harmonic ω of natural_variable.
Fields
symbol::Num: Symbol of the variable in the HarmonicBalance namespace.
name::String: Human-readable labels of the variable, used for plotting.
type::String: Type of the variable (u or v for quadratures, a for a constant, Hopf for Hopf etc.)
ω::Num: The harmonic being described.
natural_variable::Num: The natural variable whose harmonic is being described.
Once a DifferentialEquation is defined and its harmonics specified, one can extract the harmonic equations using get_harmonic_equations, which itself is composed of the subroutines harmonic_ansatz, slow_flow, fourier_transform! and drop_powers.
The harmonic equations use an additional time variable specified as slow_time in get_harmonic_equations. This is essentially a label distinguishing the time dependence of the harmonic variables (expected to be slow) from that of the oscillating terms (expeted to be fast). When the equations are Fourier-transformed to remove oscillating terms, slow_time is treated as a constant. Such an approach is exact when looking for steady states.
Apply the harmonic ansatz, followed by the slow-flow, Fourier transform and dropping higher-order derivatives to obtain a set of ODEs (the harmonic equations) governing the harmonics of diff_eom.
The harmonics evolve in slow_time, the oscillating terms themselves in fast_time. If no input is used, a variable T is defined for slow_time and fast_time is taken as the independent variable of diff_eom.
By default, all products of order > 1 of slow_time-derivatives are dropped, which means the equations are linear in the time-derivatives.
Example
julia
julia> @variables t, x(t), ω0, ω, F;
+
+# enter the simple harmonic oscillator
+julia> diff_eom = DifferentialEquation( d(x,t,2) + ω0^2 * x ~ F *cos(ω*t), x);
+
+# expand x in the harmonic ω
+julia> add_harmonic!(diff_eom, x, ω);
+
+# get equations for the harmonics evolving in the slow time T
+julia> harmonic_eom = get_harmonic_equations(diff_eom)
+
+A set of 2 harmonic equations
+Variables: u1(T), v1(T)
+Parameters: ω0, ω, F
+
+Harmonic ansatz:
+x(t) = u1*cos(ωt) + v1*sin(ωt)
+
+Harmonic equations:
+
+(ω0^2)*u1(T) + (2//1)*ω*Differential(T)(v1(T)) - (ω^2)*u1(T) ~ F
+
+(ω0^2)*v1(T) - (ω^2)*v1(T) - (2//1)*ω*Differential(T)(u1(T)) ~ 0
Expand each variable of diff_eom using the harmonics assigned to it with time as the time variable. For each harmonic of each variable, instance(s) of HarmonicVariable are automatically created and named.
Extract the Fourier components of eom corresponding to the harmonics specified in eom.variables. For each non-zero harmonic of each variable, 2 equations are generated (cos and sin Fourier coefficients). For each zero (constant) harmonic, 1 equation is generated time does not appear in the resulting equations anymore.
Underlying assumption: all time-dependences are harmonic.
`,5))]),a[57]||(a[57]=s("h2",{id:"HarmonicVariable-and-HarmonicEquation-types",tabindex:"-1"},[i("HarmonicVariable and HarmonicEquation types "),s("a",{class:"header-anchor",href:"#HarmonicVariable-and-HarmonicEquation-types","aria-label":'Permalink to "HarmonicVariable and HarmonicEquation types {#HarmonicVariable-and-HarmonicEquation-types}"'},"")],-1)),s("p",null,[a[25]||(a[25]=i("The equations governing the harmonics are stored using the two following structs. When going from the original to the harmonic equations, the harmonic ansatz ")),s("mjx-container",g,[(n(),e("svg",c,a[15]||(a[15]=[t('',1)]))),a[16]||(a[16]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"x"),s("mi",null,"i")]),s("mo",{stretchy:"false"},"("),s("mi",null,"t"),s("mo",{stretchy:"false"},")"),s("mo",null,"="),s("munderover",null,[s("mo",{"data-mjx-texclass":"OP"},"∑"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",null,"j"),s("mo",null,"="),s("mn",null,"1")]),s("mi",null,"M")]),s("msub",null,[s("mi",null,"u"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",null,"i"),s("mo",null,","),s("mi",null,"j")])]),s("mo",{stretchy:"false"},"("),s("mi",null,"T"),s("mo",{stretchy:"false"},")"),s("mi",null,"cos"),s("mo",{"data-mjx-texclass":"NONE"},""),s("mo",{stretchy:"false"},"("),s("msub",null,[s("mi",null,"ω"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",null,"i"),s("mo",null,","),s("mi",null,"j")])]),s("mi",null,"t"),s("mo",{stretchy:"false"},")"),s("mo",null,"+"),s("msub",null,[s("mi",null,"v"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",null,"i"),s("mo",null,","),s("mi",null,"j")])]),s("mo",{stretchy:"false"},"("),s("mi",null,"T"),s("mo",{stretchy:"false"},")"),s("mi",null,"sin"),s("mo",{"data-mjx-texclass":"NONE"},""),s("mo",{stretchy:"false"},"("),s("msub",null,[s("mi",null,"ω"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",null,"i"),s("mo",null,","),s("mi",null,"j")])]),s("mi",null,"t"),s("mo",{stretchy:"false"},")")])],-1))]),a[26]||(a[26]=i(" is used. Internally, each pair ")),s("mjx-container",u,[(n(),e("svg",y,a[17]||(a[17]=[t('',1)]))),a[18]||(a[18]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mo",{stretchy:"false"},"("),s("msub",null,[s("mi",null,"u"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",null,"i"),s("mo",null,","),s("mi",null,"j")])]),s("mo",null,","),s("msub",null,[s("mi",null,"v"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",null,"i"),s("mo",null,","),s("mi",null,"j")])]),s("mo",{stretchy:"false"},")")])],-1))]),a[27]||(a[27]=i(" is stored as a ")),a[28]||(a[28]=s("code",null,"HarmonicVariable",-1)),a[29]||(a[29]=i(". This includes the identification of ")),s("mjx-container",E,[(n(),e("svg",f,a[19]||(a[19]=[t('',1)]))),a[20]||(a[20]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"ω"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",null,"i"),s("mo",null,","),s("mi",null,"j")])])])],-1))]),a[30]||(a[30]=i(" and ")),s("mjx-container",x,[(n(),e("svg",b,a[21]||(a[21]=[t('',1)]))),a[22]||(a[22]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"x"),s("mi",null,"i")]),s("mo",{stretchy:"false"},"("),s("mi",null,"t"),s("mo",{stretchy:"false"},")")])],-1))]),a[31]||(a[31]=i(", which is needed to later reconstruct ")),s("mjx-container",w,[(n(),e("svg",H,a[23]||(a[23]=[t('',1)]))),a[24]||(a[24]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("msub",null,[s("mi",null,"x"),s("mi",null,"i")]),s("mo",{stretchy:"false"},"("),s("mi",null,"t"),s("mo",{stretchy:"false"},")")])],-1))]),a[32]||(a[32]=i("."))]),s("details",F,[s("summary",null,[a[33]||(a[33]=s("a",{id:"HarmonicBalance.HarmonicVariable",href:"#HarmonicBalance.HarmonicVariable"},[s("span",{class:"jlbinding"},"HarmonicBalance.HarmonicVariable")],-1)),a[34]||(a[34]=i()),o(l,{type:"info",class:"jlObjectType jlType",text:"Type"})]),a[35]||(a[35]=t('
julia
mutable struct HarmonicVariable
Holds a variable stored under symbol describing the harmonic ω of natural_variable.
Fields
symbol::Num: Symbol of the variable in the HarmonicBalance namespace.
name::String: Human-readable labels of the variable, used for plotting.
type::String: Type of the variable (u or v for quadratures, a for a constant, Hopf for Hopf etc.)
ω::Num: The harmonic being described.
natural_variable::Num: The natural variable whose harmonic is being described.
This module currently has two goals. One is calculating the first-order Jacobian, used to obtain stability and approximate (but inexpensive) the linear response of steady states. The other is calculating the full response matrix as a function of frequency; this is more accurate but more expensive.
Obtain the symbolic Jacobian matrix of eom (either a HarmonicEquation or a DifferentialEquation). This is the linearised left-hand side of F(u) = du/dT.
',7))]),e[32]||(e[32]=s("h2",{id:"Linear-response",tabindex:"-1"},[a("Linear response "),s("a",{class:"header-anchor",href:"#Linear-response","aria-label":'Permalink to "Linear response {#Linear-response}"'},"")],-1)),e[33]||(e[33]=s("p",null,[a("The response to white noise can be shown with "),s("code",null,"plot_linear_response"),a(". Depending on the "),s("code",null,"order"),a(" argument, different methods are used.")],-1)),s("details",c,[s("summary",null,[e[3]||(e[3]=s("a",{id:"HarmonicBalance.LinearResponse.plot_linear_response",href:"#HarmonicBalance.LinearResponse.plot_linear_response"},[s("span",{class:"jlbinding"},"HarmonicBalance.LinearResponse.plot_linear_response")],-1)),e[4]||(e[4]=a()),n(t,{type:"info",class:"jlObjectType jlFunction",text:"Function"})]),e[5]||(e[5]=i('
Plot the linear response to white noise of the variable nat_var for Result res on branch for input frequencies Ω_range. Slow-time derivatives up to order are kept in the process.
Any kwargs are fed to Plots' gr().
Solutions not belonging to the physical class are ignored.
',5))]),e[34]||(e[34]=s("h3",{id:"First-order",tabindex:"-1"},[a("First order "),s("a",{class:"header-anchor",href:"#First-order","aria-label":'Permalink to "First order {#First-order}"'},"")],-1)),s("p",null,[e[12]||(e[12]=a("The simplest way to extract the linear response of a steady state is to evaluate the Jacobian of the harmonic equations. Each of its eigenvalues ")),s("mjx-container",k,[(l(),o("svg",m,e[6]||(e[6]=[s("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[s("g",{"data-mml-node":"math"},[s("g",{"data-mml-node":"mi"},[s("path",{"data-c":"1D706",d:"M166 673Q166 685 183 694H202Q292 691 316 644Q322 629 373 486T474 207T524 67Q531 47 537 34T546 15T551 6T555 2T556 -2T550 -11H482Q457 3 450 18T399 152L354 277L340 262Q327 246 293 207T236 141Q211 112 174 69Q123 9 111 -1T83 -12Q47 -12 47 20Q47 37 61 52T199 187Q229 216 266 252T321 306L338 322Q338 323 288 462T234 612Q214 657 183 657Q166 657 166 673Z",style:{"stroke-width":"3"}})])])],-1)]))),e[7]||(e[7]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mi",null,"λ")])],-1))]),e[13]||(e[13]=a(" describes a Lorentzian peak in the response; ")),s("mjx-container",g,[(l(),o("svg",u,e[8]||(e[8]=[i('',1)]))),e[9]||(e[9]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mtext",null,"Re"),s("mo",{stretchy:"false"},"["),s("mi",null,"λ"),s("mo",{stretchy:"false"},"]")])],-1))]),e[14]||(e[14]=a(" gives its center and ")),s("mjx-container",b,[(l(),o("svg",f,e[10]||(e[10]=[i('',1)]))),e[11]||(e[11]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mtext",null,"Im"),s("mo",{stretchy:"false"},"["),s("mi",null,"λ"),s("mo",{stretchy:"false"},"]")])],-1))]),e[15]||(e[15]=a(" its width. Transforming the harmonic variables into the non-rotating frame (that is, inverting the harmonic ansatz) then gives the response as it would be observed in an experiment."))]),e[35]||(e[35]=s("p",null,"The advantage of this method is that for a given parameter set, only one matrix diagonalization is needed to fully describe the response spectrum. However, the method is inaccurate for response frequencies far from the frequencies used in the harmonic ansatz (it relies on the response oscillating slowly in the rotating frame).",-1)),e[36]||(e[36]=s("p",null,[a("Behind the scenes, the spectra are stored using the dedicated structs "),s("code",null,"Lorentzian"),a(" and "),s("code",null,"JacobianSpectrum"),a(".")],-1)),s("details",y,[s("summary",null,[e[16]||(e[16]=s("a",{id:"HarmonicBalance.LinearResponse.JacobianSpectrum",href:"#HarmonicBalance.LinearResponse.JacobianSpectrum"},[s("span",{class:"jlbinding"},"HarmonicBalance.LinearResponse.JacobianSpectrum")],-1)),e[17]||(e[17]=a()),n(t,{type:"info",class:"jlObjectType jlType",text:"Type"})]),e[18]||(e[18]=i('
julia
mutable struct JacobianSpectrum
Holds a set of Lorentzian objects belonging to a variable.
',5))]),e[37]||(e[37]=s("h3",{id:"Higher-orders",tabindex:"-1"},[a("Higher orders "),s("a",{class:"header-anchor",href:"#Higher-orders","aria-label":'Permalink to "Higher orders {#Higher-orders}"'},"")],-1)),e[38]||(e[38]=s("p",null,[a("Setting "),s("code",null,"order > 1"),a(" increases the accuracy of the response spectra. However, unlike for the Jacobian, here we must perform a matrix inversion for each response frequency.")],-1)),s("details",Q,[s("summary",null,[e[22]||(e[22]=s("a",{id:"HarmonicBalance.LinearResponse.ResponseMatrix",href:"#HarmonicBalance.LinearResponse.ResponseMatrix"},[s("span",{class:"jlbinding"},"HarmonicBalance.LinearResponse.ResponseMatrix")],-1)),e[23]||(e[23]=a()),n(t,{type:"info",class:"jlObjectType jlType",text:"Type"})]),e[24]||(e[24]=i('
julia
struct ResponseMatrix
Holds the compiled response matrix of a system.
Fields
matrix::Matrix{Function}: The response matrix (compiled).
symbols::Vector{Num}: Any symbolic variables in matrix to be substituted at evaluation.
variables::Vector{HarmonicVariable}: The frequencies of the harmonic variables underlying matrix. These are needed to transform the harmonic variables to the non-rotating frame.
Obtain the symbolic linear response matrix of a diff_eq corresponding to a perturbation frequency freq. This routine cannot accept a HarmonicEquation since there, some time-derivatives are already dropped. order denotes the highest differential order to be considered.
This module currently has two goals. One is calculating the first-order Jacobian, used to obtain stability and approximate (but inexpensive) the linear response of steady states. The other is calculating the full response matrix as a function of frequency; this is more accurate but more expensive.
Obtain the symbolic Jacobian matrix of eom (either a HarmonicEquation or a DifferentialEquation). This is the linearised left-hand side of F(u) = du/dT.
',7))]),e[32]||(e[32]=s("h2",{id:"Linear-response",tabindex:"-1"},[a("Linear response "),s("a",{class:"header-anchor",href:"#Linear-response","aria-label":'Permalink to "Linear response {#Linear-response}"'},"")],-1)),e[33]||(e[33]=s("p",null,[a("The response to white noise can be shown with "),s("code",null,"plot_linear_response"),a(". Depending on the "),s("code",null,"order"),a(" argument, different methods are used.")],-1)),s("details",c,[s("summary",null,[e[3]||(e[3]=s("a",{id:"HarmonicBalance.LinearResponse.plot_linear_response",href:"#HarmonicBalance.LinearResponse.plot_linear_response"},[s("span",{class:"jlbinding"},"HarmonicBalance.LinearResponse.plot_linear_response")],-1)),e[4]||(e[4]=a()),n(t,{type:"info",class:"jlObjectType jlFunction",text:"Function"})]),e[5]||(e[5]=i('
Plot the linear response to white noise of the variable nat_var for Result res on branch for input frequencies Ω_range. Slow-time derivatives up to order are kept in the process.
Any kwargs are fed to Plots' gr().
Solutions not belonging to the physical class are ignored.
',5))]),e[34]||(e[34]=s("h3",{id:"First-order",tabindex:"-1"},[a("First order "),s("a",{class:"header-anchor",href:"#First-order","aria-label":'Permalink to "First order {#First-order}"'},"")],-1)),s("p",null,[e[12]||(e[12]=a("The simplest way to extract the linear response of a steady state is to evaluate the Jacobian of the harmonic equations. Each of its eigenvalues ")),s("mjx-container",k,[(l(),o("svg",m,e[6]||(e[6]=[s("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[s("g",{"data-mml-node":"math"},[s("g",{"data-mml-node":"mi"},[s("path",{"data-c":"1D706",d:"M166 673Q166 685 183 694H202Q292 691 316 644Q322 629 373 486T474 207T524 67Q531 47 537 34T546 15T551 6T555 2T556 -2T550 -11H482Q457 3 450 18T399 152L354 277L340 262Q327 246 293 207T236 141Q211 112 174 69Q123 9 111 -1T83 -12Q47 -12 47 20Q47 37 61 52T199 187Q229 216 266 252T321 306L338 322Q338 323 288 462T234 612Q214 657 183 657Q166 657 166 673Z",style:{"stroke-width":"3"}})])])],-1)]))),e[7]||(e[7]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mi",null,"λ")])],-1))]),e[13]||(e[13]=a(" describes a Lorentzian peak in the response; ")),s("mjx-container",g,[(l(),o("svg",u,e[8]||(e[8]=[i('',1)]))),e[9]||(e[9]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mtext",null,"Re"),s("mo",{stretchy:"false"},"["),s("mi",null,"λ"),s("mo",{stretchy:"false"},"]")])],-1))]),e[14]||(e[14]=a(" gives its center and ")),s("mjx-container",b,[(l(),o("svg",f,e[10]||(e[10]=[i('',1)]))),e[11]||(e[11]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mtext",null,"Im"),s("mo",{stretchy:"false"},"["),s("mi",null,"λ"),s("mo",{stretchy:"false"},"]")])],-1))]),e[15]||(e[15]=a(" its width. Transforming the harmonic variables into the non-rotating frame (that is, inverting the harmonic ansatz) then gives the response as it would be observed in an experiment."))]),e[35]||(e[35]=s("p",null,"The advantage of this method is that for a given parameter set, only one matrix diagonalization is needed to fully describe the response spectrum. However, the method is inaccurate for response frequencies far from the frequencies used in the harmonic ansatz (it relies on the response oscillating slowly in the rotating frame).",-1)),e[36]||(e[36]=s("p",null,[a("Behind the scenes, the spectra are stored using the dedicated structs "),s("code",null,"Lorentzian"),a(" and "),s("code",null,"JacobianSpectrum"),a(".")],-1)),s("details",y,[s("summary",null,[e[16]||(e[16]=s("a",{id:"HarmonicBalance.LinearResponse.JacobianSpectrum",href:"#HarmonicBalance.LinearResponse.JacobianSpectrum"},[s("span",{class:"jlbinding"},"HarmonicBalance.LinearResponse.JacobianSpectrum")],-1)),e[17]||(e[17]=a()),n(t,{type:"info",class:"jlObjectType jlType",text:"Type"})]),e[18]||(e[18]=i('
julia
mutable struct JacobianSpectrum
Holds a set of Lorentzian objects belonging to a variable.
',5))]),e[37]||(e[37]=s("h3",{id:"Higher-orders",tabindex:"-1"},[a("Higher orders "),s("a",{class:"header-anchor",href:"#Higher-orders","aria-label":'Permalink to "Higher orders {#Higher-orders}"'},"")],-1)),e[38]||(e[38]=s("p",null,[a("Setting "),s("code",null,"order > 1"),a(" increases the accuracy of the response spectra. However, unlike for the Jacobian, here we must perform a matrix inversion for each response frequency.")],-1)),s("details",Q,[s("summary",null,[e[22]||(e[22]=s("a",{id:"HarmonicBalance.LinearResponse.ResponseMatrix",href:"#HarmonicBalance.LinearResponse.ResponseMatrix"},[s("span",{class:"jlbinding"},"HarmonicBalance.LinearResponse.ResponseMatrix")],-1)),e[23]||(e[23]=a()),n(t,{type:"info",class:"jlObjectType jlType",text:"Type"})]),e[24]||(e[24]=i('
julia
struct ResponseMatrix
Holds the compiled response matrix of a system.
Fields
matrix::Matrix{Function}: The response matrix (compiled).
symbols::Vector{Num}: Any symbolic variables in matrix to be substituted at evaluation.
variables::Vector{HarmonicVariable}: The frequencies of the harmonic variables underlying matrix. These are needed to transform the harmonic variables to the non-rotating frame.
Obtain the symbolic linear response matrix of a diff_eq corresponding to a perturbation frequency freq. This routine cannot accept a HarmonicEquation since there, some time-derivatives are already dropped. order denotes the highest differential order to be considered.
',3))])])}const V=r(d,[["render",H]]);export{B as __pageData,V as default};
diff --git a/v0.10.10/assets/manual_plotting.md.Ed07l47p.js b/v0.10.10/assets/manual_plotting.md.Ed07l47p.js
new file mode 100644
index 00000000..f93ccdcb
--- /dev/null
+++ b/v0.10.10/assets/manual_plotting.md.Ed07l47p.js
@@ -0,0 +1,10 @@
+import{_ as l,c as o,j as a,a as t,G as e,a4 as n,B as p,o as r}from"./chunks/framework.TrWZWXe1.js";const j=JSON.parse('{"title":"Analysis and plotting","description":"","frontmatter":{},"headers":[],"relativePath":"manual/plotting.md","filePath":"manual/plotting.md"}'),d={name:"manual/plotting.md"},h={class:"jldocstring custom-block",open:""},c={class:"jldocstring custom-block",open:""},g={class:"jldocstring custom-block",open:""},u={class:"jldocstring custom-block",open:""};function k(b,s,y,m,E,f){const i=p("Badge");return r(),o("div",null,[s[12]||(s[12]=a("h1",{id:"Analysis-and-plotting",tabindex:"-1"},[t("Analysis and plotting "),a("a",{class:"header-anchor",href:"#Analysis-and-plotting","aria-label":'Permalink to "Analysis and plotting {#Analysis-and-plotting}"'},"")],-1)),s[13]||(s[13]=a("p",null,[t("The key method for visualization is "),a("code",null,"transform_solutions"),t(", which parses a string into a symbolic expression and evaluates it for every steady state solution.")],-1)),a("details",h,[a("summary",null,[s[0]||(s[0]=a("a",{id:"HarmonicBalance.transform_solutions",href:"#HarmonicBalance.transform_solutions"},[a("span",{class:"jlbinding"},"HarmonicBalance.transform_solutions")],-1)),s[1]||(s[1]=t()),e(i,{type:"info",class:"jlObjectType jlFunction",text:"Function"})]),s[2]||(s[2]=n(`
Takes a Result object and a string f representing a Symbolics.jl expression. Returns an array with the values of f evaluated for the respective solutions. Additional substitution rules can be specified in rules in the format ("a" => val) or (a => val)
`,3))]),s[14]||(s[14]=a("h2",{id:"Plotting-solutions",tabindex:"-1"},[t("Plotting solutions "),a("a",{class:"header-anchor",href:"#Plotting-solutions","aria-label":'Permalink to "Plotting solutions {#Plotting-solutions}"'},"")],-1)),s[15]||(s[15]=a("p",null,[t("The function "),a("code",null,"plot"),t(" is multiple-dispatched to plot 1D and 2D datasets. In 1D, the solutions are colour-coded according to the branches obtained by "),a("code",null,"sort_solutions"),t(".")],-1)),a("details",c,[a("summary",null,[s[3]||(s[3]=a("a",{id:"RecipesBase.plot-Tuple{Result, Vararg{Any}}",href:"#RecipesBase.plot-Tuple{Result, Vararg{Any}}"},[a("span",{class:"jlbinding"},"RecipesBase.plot")],-1)),s[4]||(s[4]=t()),e(i,{type:"info",class:"jlObjectType jlMethod",text:"Method"})]),s[5]||(s[5]=n(`
Class selection done by passing String or Vector{String} as kwarg:
class : only plot solutions in this class(es) ("all" --> plot everything)
+not_class : do not plot solutions in this class(es)
Other kwargs are passed onto Plots.gr().
See also plot!
The x,y,z arguments are Strings compatible with Symbolics.jl, e.g., y=2*sqrt(u1^2+v1^2) plots the amplitude of the first quadratures multiplied by 2.
1D plots
plot(res::Result; x::String, y::String, class="default", not_class=[], kwargs...)
+plot(res::Result, y::String; kwargs...) # take x automatically from Result
Default behaviour is to plot stable solutions as full lines, unstable as dashed.
If a sweep in two parameters were done, i.e., dim(res)==2, a one dimensional cut can be plotted by using the keyword cut were it takes a Pair{Num, Float64} type entry. For example, plot(res, y="sqrt(u1^2+v1^2), cut=(λ => 0.2)) plots a cut at λ = 0.2.
`,17))]),s[16]||(s[16]=a("h2",{id:"Plotting-phase-diagrams",tabindex:"-1"},[t("Plotting phase diagrams "),a("a",{class:"header-anchor",href:"#Plotting-phase-diagrams","aria-label":'Permalink to "Plotting phase diagrams {#Plotting-phase-diagrams}"'},"")],-1)),s[17]||(s[17]=a("p",null,[t("In many problems, rather than in any property of the solutions themselves, we are interested in the phase diagrams, encoding the number of (stable) solutions in different regions of the parameter space. "),a("code",null,"plot_phase_diagram"),t(" handles this for 1D and 2D datasets.")],-1)),a("details",g,[a("summary",null,[s[6]||(s[6]=a("a",{id:"HarmonicBalance.plot_phase_diagram",href:"#HarmonicBalance.plot_phase_diagram"},[a("span",{class:"jlbinding"},"HarmonicBalance.plot_phase_diagram")],-1)),s[7]||(s[7]=t()),e(i,{type:"info",class:"jlObjectType jlFunction",text:"Function"})]),s[8]||(s[8]=n(`
`,6))]),s[18]||(s[18]=a("h2",{id:"Plot-spaghetti-plot",tabindex:"-1"},[t("Plot spaghetti plot "),a("a",{class:"header-anchor",href:"#Plot-spaghetti-plot","aria-label":'Permalink to "Plot spaghetti plot {#Plot-spaghetti-plot}"'},"")],-1)),s[19]||(s[19]=a("p",null,[t("Sometimes, it is useful to plot the quadratures of the steady states (u, v) in function of a swept parameter. This is done with "),a("code",null,"plot_spaghetti"),t(".")],-1)),a("details",u,[a("summary",null,[s[9]||(s[9]=a("a",{id:"HarmonicBalance.plot_spaghetti",href:"#HarmonicBalance.plot_spaghetti"},[a("span",{class:"jlbinding"},"HarmonicBalance.plot_spaghetti")],-1)),s[10]||(s[10]=t()),e(i,{type:"info",class:"jlObjectType jlFunction",text:"Function"})]),s[11]||(s[11]=n(`
julia
plot_spaghetti(res::Result; x, y, z, kwargs...)
Plot a three dimension line plot of a Result object as a function of the parameters. Works with 1D and 2D datasets.
Class selection done by passing String or Vector{String} as kwarg:
class::String : only count solutions in this class ("all" --> plot everything)
+not_class::String : do not count solutions in this class
`,6))])])}const C=l(d,[["render",k]]);export{j as __pageData,C as default};
diff --git a/v0.10.10/assets/manual_plotting.md.Ed07l47p.lean.js b/v0.10.10/assets/manual_plotting.md.Ed07l47p.lean.js
new file mode 100644
index 00000000..f93ccdcb
--- /dev/null
+++ b/v0.10.10/assets/manual_plotting.md.Ed07l47p.lean.js
@@ -0,0 +1,10 @@
+import{_ as l,c as o,j as a,a as t,G as e,a4 as n,B as p,o as r}from"./chunks/framework.TrWZWXe1.js";const j=JSON.parse('{"title":"Analysis and plotting","description":"","frontmatter":{},"headers":[],"relativePath":"manual/plotting.md","filePath":"manual/plotting.md"}'),d={name:"manual/plotting.md"},h={class:"jldocstring custom-block",open:""},c={class:"jldocstring custom-block",open:""},g={class:"jldocstring custom-block",open:""},u={class:"jldocstring custom-block",open:""};function k(b,s,y,m,E,f){const i=p("Badge");return r(),o("div",null,[s[12]||(s[12]=a("h1",{id:"Analysis-and-plotting",tabindex:"-1"},[t("Analysis and plotting "),a("a",{class:"header-anchor",href:"#Analysis-and-plotting","aria-label":'Permalink to "Analysis and plotting {#Analysis-and-plotting}"'},"")],-1)),s[13]||(s[13]=a("p",null,[t("The key method for visualization is "),a("code",null,"transform_solutions"),t(", which parses a string into a symbolic expression and evaluates it for every steady state solution.")],-1)),a("details",h,[a("summary",null,[s[0]||(s[0]=a("a",{id:"HarmonicBalance.transform_solutions",href:"#HarmonicBalance.transform_solutions"},[a("span",{class:"jlbinding"},"HarmonicBalance.transform_solutions")],-1)),s[1]||(s[1]=t()),e(i,{type:"info",class:"jlObjectType jlFunction",text:"Function"})]),s[2]||(s[2]=n(`
Takes a Result object and a string f representing a Symbolics.jl expression. Returns an array with the values of f evaluated for the respective solutions. Additional substitution rules can be specified in rules in the format ("a" => val) or (a => val)
`,3))]),s[14]||(s[14]=a("h2",{id:"Plotting-solutions",tabindex:"-1"},[t("Plotting solutions "),a("a",{class:"header-anchor",href:"#Plotting-solutions","aria-label":'Permalink to "Plotting solutions {#Plotting-solutions}"'},"")],-1)),s[15]||(s[15]=a("p",null,[t("The function "),a("code",null,"plot"),t(" is multiple-dispatched to plot 1D and 2D datasets. In 1D, the solutions are colour-coded according to the branches obtained by "),a("code",null,"sort_solutions"),t(".")],-1)),a("details",c,[a("summary",null,[s[3]||(s[3]=a("a",{id:"RecipesBase.plot-Tuple{Result, Vararg{Any}}",href:"#RecipesBase.plot-Tuple{Result, Vararg{Any}}"},[a("span",{class:"jlbinding"},"RecipesBase.plot")],-1)),s[4]||(s[4]=t()),e(i,{type:"info",class:"jlObjectType jlMethod",text:"Method"})]),s[5]||(s[5]=n(`
Class selection done by passing String or Vector{String} as kwarg:
class : only plot solutions in this class(es) ("all" --> plot everything)
+not_class : do not plot solutions in this class(es)
Other kwargs are passed onto Plots.gr().
See also plot!
The x,y,z arguments are Strings compatible with Symbolics.jl, e.g., y=2*sqrt(u1^2+v1^2) plots the amplitude of the first quadratures multiplied by 2.
1D plots
plot(res::Result; x::String, y::String, class="default", not_class=[], kwargs...)
+plot(res::Result, y::String; kwargs...) # take x automatically from Result
Default behaviour is to plot stable solutions as full lines, unstable as dashed.
If a sweep in two parameters were done, i.e., dim(res)==2, a one dimensional cut can be plotted by using the keyword cut were it takes a Pair{Num, Float64} type entry. For example, plot(res, y="sqrt(u1^2+v1^2), cut=(λ => 0.2)) plots a cut at λ = 0.2.
`,17))]),s[16]||(s[16]=a("h2",{id:"Plotting-phase-diagrams",tabindex:"-1"},[t("Plotting phase diagrams "),a("a",{class:"header-anchor",href:"#Plotting-phase-diagrams","aria-label":'Permalink to "Plotting phase diagrams {#Plotting-phase-diagrams}"'},"")],-1)),s[17]||(s[17]=a("p",null,[t("In many problems, rather than in any property of the solutions themselves, we are interested in the phase diagrams, encoding the number of (stable) solutions in different regions of the parameter space. "),a("code",null,"plot_phase_diagram"),t(" handles this for 1D and 2D datasets.")],-1)),a("details",g,[a("summary",null,[s[6]||(s[6]=a("a",{id:"HarmonicBalance.plot_phase_diagram",href:"#HarmonicBalance.plot_phase_diagram"},[a("span",{class:"jlbinding"},"HarmonicBalance.plot_phase_diagram")],-1)),s[7]||(s[7]=t()),e(i,{type:"info",class:"jlObjectType jlFunction",text:"Function"})]),s[8]||(s[8]=n(`
`,6))]),s[18]||(s[18]=a("h2",{id:"Plot-spaghetti-plot",tabindex:"-1"},[t("Plot spaghetti plot "),a("a",{class:"header-anchor",href:"#Plot-spaghetti-plot","aria-label":'Permalink to "Plot spaghetti plot {#Plot-spaghetti-plot}"'},"")],-1)),s[19]||(s[19]=a("p",null,[t("Sometimes, it is useful to plot the quadratures of the steady states (u, v) in function of a swept parameter. This is done with "),a("code",null,"plot_spaghetti"),t(".")],-1)),a("details",u,[a("summary",null,[s[9]||(s[9]=a("a",{id:"HarmonicBalance.plot_spaghetti",href:"#HarmonicBalance.plot_spaghetti"},[a("span",{class:"jlbinding"},"HarmonicBalance.plot_spaghetti")],-1)),s[10]||(s[10]=t()),e(i,{type:"info",class:"jlObjectType jlFunction",text:"Function"})]),s[11]||(s[11]=n(`
julia
plot_spaghetti(res::Result; x, y, z, kwargs...)
Plot a three dimension line plot of a Result object as a function of the parameters. Works with 1D and 2D datasets.
Class selection done by passing String or Vector{String} as kwarg:
class::String : only count solutions in this class ("all" --> plot everything)
+not_class::String : do not count solutions in this class
`,6))])])}const C=l(d,[["render",k]]);export{j as __pageData,C as default};
diff --git a/v0.10.10/assets/manual_saving.md.DzKvFFDJ.js b/v0.10.10/assets/manual_saving.md.DzKvFFDJ.js
new file mode 100644
index 00000000..2b9f04ca
--- /dev/null
+++ b/v0.10.10/assets/manual_saving.md.DzKvFFDJ.js
@@ -0,0 +1 @@
+import{_ as t,c as l,a4 as s,j as e,a as i,G as o,B as c,o as d}from"./chunks/framework.TrWZWXe1.js";const y=JSON.parse('{"title":"Saving and loading","description":"","frontmatter":{},"headers":[],"relativePath":"manual/saving.md","filePath":"manual/saving.md"}'),r={name:"manual/saving.md"},p={class:"jldocstring custom-block",open:""},b={class:"jldocstring custom-block",open:""},g={class:"jldocstring custom-block",open:""};function u(h,a,m,f,v,k){const n=c("Badge");return d(),l("div",null,[a[9]||(a[9]=s('
All of the types native to HarmonicBalance.jl can be saved into a .jld2 file using save and loaded using load. Most of the saving/loading is performed using the package JLD2.jl, with the addition of reinstating the symbolic variables in the HarmonicBalance namespace (needed to parse expressions used in the plotting functions) and recompiling stored functions (needed to evaluate Jacobians). As a consequence, composite objects such as Result can be saved and loaded with no loss of information.
The function export_csv saves a .csv file which can be plot elsewhere.
Saves object into .jld2 file filename (the suffix is added automatically if not entered). The resulting file contains a dictionary with a single entry.
Loads an object from filename. For objects containing symbolic expressions such as HarmonicEquation, the symbolic variables are reinstated in the HarmonicBalance namespace.
',1))])}const B=t(r,[["render",u]]);export{y as __pageData,B as default};
diff --git a/v0.10.10/assets/manual_saving.md.DzKvFFDJ.lean.js b/v0.10.10/assets/manual_saving.md.DzKvFFDJ.lean.js
new file mode 100644
index 00000000..2b9f04ca
--- /dev/null
+++ b/v0.10.10/assets/manual_saving.md.DzKvFFDJ.lean.js
@@ -0,0 +1 @@
+import{_ as t,c as l,a4 as s,j as e,a as i,G as o,B as c,o as d}from"./chunks/framework.TrWZWXe1.js";const y=JSON.parse('{"title":"Saving and loading","description":"","frontmatter":{},"headers":[],"relativePath":"manual/saving.md","filePath":"manual/saving.md"}'),r={name:"manual/saving.md"},p={class:"jldocstring custom-block",open:""},b={class:"jldocstring custom-block",open:""},g={class:"jldocstring custom-block",open:""};function u(h,a,m,f,v,k){const n=c("Badge");return d(),l("div",null,[a[9]||(a[9]=s('
All of the types native to HarmonicBalance.jl can be saved into a .jld2 file using save and loaded using load. Most of the saving/loading is performed using the package JLD2.jl, with the addition of reinstating the symbolic variables in the HarmonicBalance namespace (needed to parse expressions used in the plotting functions) and recompiling stored functions (needed to evaluate Jacobians). As a consequence, composite objects such as Result can be saved and loaded with no loss of information.
The function export_csv saves a .csv file which can be plot elsewhere.
Saves object into .jld2 file filename (the suffix is added automatically if not entered). The resulting file contains a dictionary with a single entry.
Loads an object from filename. For objects containing symbolic expressions such as HarmonicEquation, the symbolic variables are reinstated in the HarmonicBalance namespace.
Once a differential equation of motion has been defined in DifferentialEquation and converted to a HarmonicEquation, we may use the homotopy continuation method (as implemented in HomotopyContinuation.jl) to find steady states. This means that, having called get_harmonic_equations, we need to set all time-derivatives to zero and parse the resulting algebraic equations into a Problem.
Problem holds the steady-state equations, and (optionally) the symbolic Jacobian which is needed for stability / linear response calculations.
Once defined, a Problem can be solved for a set of input parameters using get_steady_states to obtain Result.
Holds a set of algebraic equations describing the steady state of a system.
Fields
variables::Vector{Num}: The harmonic variables to be solved for.
parameters::Vector{Num}: All symbols which are not the harmonic variables.
system::HomotopyContinuation.ModelKit.System: The input object for HomotopyContinuation.jl solver methods.
jacobian::Any: The Jacobian matrix (possibly symbolic). If false, the Jacobian is ignored (may be calculated implicitly after solving).
eom::HarmonicEquation: The HarmonicEquation object used to generate this Problem.
Constructors
julia
Problem(eom::HarmonicEquation; Jacobian=true) # find and store the symbolic Jacobian
+Problem(eom::HarmonicEquation; Jacobian="implicit") # ignore the Jacobian for now, compute implicitly later
+Problem(eom::HarmonicEquation; Jacobian=J) # use J as the Jacobian (a function that takes a Dict)
+Problem(eom::HarmonicEquation; Jacobian=false) # ignore the Jacobian
Solves prob over the ranges specified by swept_parameters, keeping fixed_parameters constant. swept_parameters accepts pairs mapping symbolic variables to arrays or LinRange. fixed_parameters accepts pairs mapping symbolic variables to numbers.
Keyword arguments
method: If :warmup (default), a problem similar to prob but with random complex parameters is first solved to find all non-singular paths. The subsequent tracking to find results for all swept_parameters is then much faster than the initial solving. If method=:total_degree, each parameter point is solved separately by tracking the maximum number of paths (employs a total degree homotopy).
This takes far longer but can be more reliable.
threading: If true, multithreaded support is activated. The number of available threads is set by the environment variable JULIA_NUM_THREADS.
sorting: the method used by sort_solutions to get continuous solutions branches. The current options are "hilbert" (1D sorting along a Hilbert curve), "nearest" (nearest-neighbor sorting) and "none".
show_progress: Indicate whether a progress bar should be displayed.
# having obtained a Problem object, let's find steady states
+julia> range = ParameterRange(ω => LinRange(0.8,1.2,100) ) # 100 parameter sets to solve
+julia> fixed = ParameterList(m => 1, γ => 0.01, F => 0.5, ω_0 => 1)
+julia> get_steady_states(problem, range, fixed)
+
+A steady state result for 100 parameter points
+
+ Solution branches: 1
+ of which real: 1
+ of which stable: 1
+
+ Classes: stable, physical, Hopf, binary_labels
It is also possible to create multi-dimensional solutions plots.
julia
# The swept parameters take precedence over fixed -> use the same fixed
+julia> range = ParameterRange(ω => LinRange(0.8,1.2,100), F => LinRange(0.1,1.0,10) ) # 100x10 parameter sets
+
+# The swept parameters take precedence over fixed -> the F in fixed is now ignored
+julia> get_steady_states(problem, range, fixed)
+
+A steady state result for 1000 parameter points
+
+ Solution branches: 1
+ of which real: 1
+ of which stable: 1
+
+ Classes: stable, physical, Hopf, binary_labels
solutions::Array{Vector{Vector{ComplexF64}}}: The variable values of steady-state solutions.
swept_parameters::OrderedCollections.OrderedDict{Num, Vector{Union{Float64, ComplexF64}}}: Values of all parameters for all solutions.
fixed_parameters::OrderedCollections.OrderedDict{Num, Float64}: The parameters fixed throughout the solutions.
problem::Problem: The Problem used to generate this.
classes::Dict{String, Array}: Maps strings such as "stable", "physical" etc to arrays of values, classifying the solutions (see method classify_solutions!).
jacobian::Function: The Jacobian with fixed_parameters already substituted. Accepts a dictionary specifying the solution. If problem.jacobian is a symbolic matrix, this holds a compiled function. If problem.jacobian was false, this holds a function that rearranges the equations to find J only after numerical values are inserted (preferable in cases where the symbolic J would be very large).
seed::Union{Nothing, UInt32}: Seed used for the solver
',5))]),i[23]||(i[23]=s("h2",{id:"Classifying-solutions",tabindex:"-1"},[a("Classifying solutions "),s("a",{class:"header-anchor",href:"#Classifying-solutions","aria-label":'Permalink to "Classifying solutions {#Classifying-solutions}"'},"")],-1)),i[24]||(i[24]=s("p",null,[a("The solutions in "),s("code",null,"Result"),a(" are accompanied by similarly-sized boolean arrays stored in the dictionary "),s("code",null,"Result.classes"),a(". The classes can be used by the plotting functions to show/hide/label certain solutions.")],-1)),i[25]||(i[25]=s("p",null,[a('By default, classes "physical", "stable" and "binary_labels" are created. User-defined classification is possible with '),s("code",null,"classify_solutions!"),a(".")],-1)),s("details",y,[s("summary",null,[i[16]||(i[16]=s("a",{id:"HarmonicBalance.classify_solutions!",href:"#HarmonicBalance.classify_solutions!"},[s("span",{class:"jlbinding"},"HarmonicBalance.classify_solutions!")],-1)),i[17]||(i[17]=a()),n(e,{type:"info",class:"jlObjectType jlFunction",text:"Function"})]),i[18]||(i[18]=t(`
Solving a steady-state problem over a range of parameters returns a solution set for each parameter. For a continuous change of parameters, each solution in a set usually also changes continuously; it is said to form a ''solution branch''. For an example, see the three colour-coded branches for the Duffing oscillator in Example 1.
For stable states, the branches describe a system's behaviour under adiabatic parameter changes.
Therefore, after solving for a parameter range, we want to order each solution set such that the solutions' order reflects the branches.
The function sort_solutions goes over the the raw output of get_steady_states and sorts each entry such that neighboring solution sets minimize Euclidean distance.
Currently, sort_solutions is compatible with 1D and 2D arrays of solution sets.
Sorts solutions into branches according to the method sorting.
solutions is an n-dimensional array of Vector{Vector}. Each element describes a set of solutions for a given parameter set. The output is a similar array, with each solution set rearranged such that neighboring solution sets have the smallest Euclidean distance.
Keyword arguments
sorting: the method used by sort_solutions to get continuous solutions branches. The current options are "hilbert" (1D sorting along a Hilbert curve), "nearest" (nearest-neighbor sorting) and "none".
show_progress: Indicate whether a progress bar should be displayed.
Once a differential equation of motion has been defined in DifferentialEquation and converted to a HarmonicEquation, we may use the homotopy continuation method (as implemented in HomotopyContinuation.jl) to find steady states. This means that, having called get_harmonic_equations, we need to set all time-derivatives to zero and parse the resulting algebraic equations into a Problem.
Problem holds the steady-state equations, and (optionally) the symbolic Jacobian which is needed for stability / linear response calculations.
Once defined, a Problem can be solved for a set of input parameters using get_steady_states to obtain Result.
Holds a set of algebraic equations describing the steady state of a system.
Fields
variables::Vector{Num}: The harmonic variables to be solved for.
parameters::Vector{Num}: All symbols which are not the harmonic variables.
system::HomotopyContinuation.ModelKit.System: The input object for HomotopyContinuation.jl solver methods.
jacobian::Any: The Jacobian matrix (possibly symbolic). If false, the Jacobian is ignored (may be calculated implicitly after solving).
eom::HarmonicEquation: The HarmonicEquation object used to generate this Problem.
Constructors
julia
Problem(eom::HarmonicEquation; Jacobian=true) # find and store the symbolic Jacobian
+Problem(eom::HarmonicEquation; Jacobian="implicit") # ignore the Jacobian for now, compute implicitly later
+Problem(eom::HarmonicEquation; Jacobian=J) # use J as the Jacobian (a function that takes a Dict)
+Problem(eom::HarmonicEquation; Jacobian=false) # ignore the Jacobian
Solves prob over the ranges specified by swept_parameters, keeping fixed_parameters constant. swept_parameters accepts pairs mapping symbolic variables to arrays or LinRange. fixed_parameters accepts pairs mapping symbolic variables to numbers.
Keyword arguments
method: If :warmup (default), a problem similar to prob but with random complex parameters is first solved to find all non-singular paths. The subsequent tracking to find results for all swept_parameters is then much faster than the initial solving. If method=:total_degree, each parameter point is solved separately by tracking the maximum number of paths (employs a total degree homotopy).
This takes far longer but can be more reliable.
threading: If true, multithreaded support is activated. The number of available threads is set by the environment variable JULIA_NUM_THREADS.
sorting: the method used by sort_solutions to get continuous solutions branches. The current options are "hilbert" (1D sorting along a Hilbert curve), "nearest" (nearest-neighbor sorting) and "none".
show_progress: Indicate whether a progress bar should be displayed.
# having obtained a Problem object, let's find steady states
+julia> range = ParameterRange(ω => LinRange(0.8,1.2,100) ) # 100 parameter sets to solve
+julia> fixed = ParameterList(m => 1, γ => 0.01, F => 0.5, ω_0 => 1)
+julia> get_steady_states(problem, range, fixed)
+
+A steady state result for 100 parameter points
+
+ Solution branches: 1
+ of which real: 1
+ of which stable: 1
+
+ Classes: stable, physical, Hopf, binary_labels
It is also possible to create multi-dimensional solutions plots.
julia
# The swept parameters take precedence over fixed -> use the same fixed
+julia> range = ParameterRange(ω => LinRange(0.8,1.2,100), F => LinRange(0.1,1.0,10) ) # 100x10 parameter sets
+
+# The swept parameters take precedence over fixed -> the F in fixed is now ignored
+julia> get_steady_states(problem, range, fixed)
+
+A steady state result for 1000 parameter points
+
+ Solution branches: 1
+ of which real: 1
+ of which stable: 1
+
+ Classes: stable, physical, Hopf, binary_labels
solutions::Array{Vector{Vector{ComplexF64}}}: The variable values of steady-state solutions.
swept_parameters::OrderedCollections.OrderedDict{Num, Vector{Union{Float64, ComplexF64}}}: Values of all parameters for all solutions.
fixed_parameters::OrderedCollections.OrderedDict{Num, Float64}: The parameters fixed throughout the solutions.
problem::Problem: The Problem used to generate this.
classes::Dict{String, Array}: Maps strings such as "stable", "physical" etc to arrays of values, classifying the solutions (see method classify_solutions!).
jacobian::Function: The Jacobian with fixed_parameters already substituted. Accepts a dictionary specifying the solution. If problem.jacobian is a symbolic matrix, this holds a compiled function. If problem.jacobian was false, this holds a function that rearranges the equations to find J only after numerical values are inserted (preferable in cases where the symbolic J would be very large).
seed::Union{Nothing, UInt32}: Seed used for the solver
',5))]),i[23]||(i[23]=s("h2",{id:"Classifying-solutions",tabindex:"-1"},[a("Classifying solutions "),s("a",{class:"header-anchor",href:"#Classifying-solutions","aria-label":'Permalink to "Classifying solutions {#Classifying-solutions}"'},"")],-1)),i[24]||(i[24]=s("p",null,[a("The solutions in "),s("code",null,"Result"),a(" are accompanied by similarly-sized boolean arrays stored in the dictionary "),s("code",null,"Result.classes"),a(". The classes can be used by the plotting functions to show/hide/label certain solutions.")],-1)),i[25]||(i[25]=s("p",null,[a('By default, classes "physical", "stable" and "binary_labels" are created. User-defined classification is possible with '),s("code",null,"classify_solutions!"),a(".")],-1)),s("details",y,[s("summary",null,[i[16]||(i[16]=s("a",{id:"HarmonicBalance.classify_solutions!",href:"#HarmonicBalance.classify_solutions!"},[s("span",{class:"jlbinding"},"HarmonicBalance.classify_solutions!")],-1)),i[17]||(i[17]=a()),n(e,{type:"info",class:"jlObjectType jlFunction",text:"Function"})]),i[18]||(i[18]=t(`
Solving a steady-state problem over a range of parameters returns a solution set for each parameter. For a continuous change of parameters, each solution in a set usually also changes continuously; it is said to form a ''solution branch''. For an example, see the three colour-coded branches for the Duffing oscillator in Example 1.
For stable states, the branches describe a system's behaviour under adiabatic parameter changes.
Therefore, after solving for a parameter range, we want to order each solution set such that the solutions' order reflects the branches.
The function sort_solutions goes over the the raw output of get_steady_states and sorts each entry such that neighboring solution sets minimize Euclidean distance.
Currently, sort_solutions is compatible with 1D and 2D arrays of solution sets.
Sorts solutions into branches according to the method sorting.
solutions is an n-dimensional array of Vector{Vector}. Each element describes a set of solutions for a given parameter set. The output is a similar array, with each solution set rearranged such that neighboring solution sets have the smallest Euclidean distance.
Keyword arguments
sorting: the method used by sort_solutions to get continuous solutions branches. The current options are "hilbert" (1D sorting along a Hilbert curve), "nearest" (nearest-neighbor sorting) and "none".
show_progress: Indicate whether a progress bar should be displayed.
`,6))])])}const D=h(r,[["render",T]]);export{w as __pageData,D as default};
diff --git a/v0.10.10/assets/manual_time_dependent.md.DWO2LPMA.js b/v0.10.10/assets/manual_time_dependent.md.DWO2LPMA.js
new file mode 100644
index 00000000..c5f49b5d
--- /dev/null
+++ b/v0.10.10/assets/manual_time_dependent.md.DWO2LPMA.js
@@ -0,0 +1,29 @@
+import{_ as l,c as p,a4 as e,j as i,a,G as t,B as h,o as k}from"./chunks/framework.TrWZWXe1.js";const f=JSON.parse('{"title":"Time evolution","description":"","frontmatter":{},"headers":[],"relativePath":"manual/time_dependent.md","filePath":"manual/time_dependent.md"}'),r={name:"manual/time_dependent.md"},o={class:"jldocstring custom-block",open:""},d={class:"jldocstring custom-block",open:""},E={class:"jldocstring custom-block",open:""},c={class:"jldocstring custom-block",open:""};function g(y,s,u,m,b,F){const n=h("Badge");return k(),p("div",null,[s[12]||(s[12]=e('
Generally, solving the ODE of oscillatory systems in time requires numerically tracking the oscillations. This is a computationally expensive process; however, using the harmonic ansatz removes the oscillatory time-dependence. Simulating instead the harmonic variables of a HarmonicEquation is vastly more efficient - a steady state of the system appears as a fixed point in multidimensional space rather than an oscillatory function.
The Extention TimeEvolution is used to interface HarmonicEquation with the solvers contained in OrdinaryDiffEq.jl. Time-dependent parameter sweeps are defined using the object ParameterSweep. To use the TimeEvolution extension, one must first load the OrdinaryDiffEq.jl package.
Creates an ODEProblem object used by OrdinaryDiffEqTsit5.jl from the equations in eom to simulate time-evolution within timespan. fixed_parameters must be a dictionary mapping parameters+variables to numbers (possible to use a solution index, e.g. solutions[x][y] for branch y of solution x). If x0 is specified, it is used as an initial condition; otherwise the values from fixed_parameters are used.
Represents a sweep of one or more parameters of a HarmonicEquation. During a sweep, the selected parameters vary linearly over some timespan and are constant elsewhere.
Sweeps of different variables can be combined using +.
Fields
functions::Dict{Num, Function}: Maps each swept parameter to a function.
Examples
julia
# create a sweep of parameter a from 0 to 1 over time 0 -> 100
+julia> @variables a,b;
+julia> sweep = ParameterSweep(a => [0., 1.], (0, 100));
+julia> sweep[a](50)
+0.5
+julia> sweep[a](200)
+1.0
+
+# do the same, varying two parameters simultaneously
+julia> sweep = ParameterSweep([a => [0.,1.], b => [0., 1.]], (0,100))
',10))]),s[14]||(s[14]=i("h2",{id:"miscellaneous",tabindex:"-1"},[a("Miscellaneous "),i("a",{class:"header-anchor",href:"#miscellaneous","aria-label":'Permalink to "Miscellaneous"'},"")],-1)),s[15]||(s[15]=i("p",null,"Using a time-dependent simulation can verify solution stability in cases where the Jacobian is too expensive to compute.",-1)),i("details",c,[i("summary",null,[s[9]||(s[9]=i("a",{id:"HarmonicBalance.is_stable",href:"#HarmonicBalance.is_stable"},[i("span",{class:"jlbinding"},"HarmonicBalance.is_stable")],-1)),s[10]||(s[10]=a()),t(n,{type:"info",class:"jlObjectType jlFunction",text:"Function"})]),s[11]||(s[11]=e(`
Returns true if the solution soln of the Result res is stable. Stable solutions are real and have all Jacobian eigenvalues Re[λ] <= 0. im_tol : an absolute threshold to distinguish real/complex numbers. rel_tol: Re(λ) considered <=0 if real.(λ) < rel_tol*abs(λmax)
`,7))])])}const v=l(r,[["render",g]]);export{f as __pageData,v as default};
diff --git a/v0.10.10/assets/manual_time_dependent.md.DWO2LPMA.lean.js b/v0.10.10/assets/manual_time_dependent.md.DWO2LPMA.lean.js
new file mode 100644
index 00000000..c5f49b5d
--- /dev/null
+++ b/v0.10.10/assets/manual_time_dependent.md.DWO2LPMA.lean.js
@@ -0,0 +1,29 @@
+import{_ as l,c as p,a4 as e,j as i,a,G as t,B as h,o as k}from"./chunks/framework.TrWZWXe1.js";const f=JSON.parse('{"title":"Time evolution","description":"","frontmatter":{},"headers":[],"relativePath":"manual/time_dependent.md","filePath":"manual/time_dependent.md"}'),r={name:"manual/time_dependent.md"},o={class:"jldocstring custom-block",open:""},d={class:"jldocstring custom-block",open:""},E={class:"jldocstring custom-block",open:""},c={class:"jldocstring custom-block",open:""};function g(y,s,u,m,b,F){const n=h("Badge");return k(),p("div",null,[s[12]||(s[12]=e('
Generally, solving the ODE of oscillatory systems in time requires numerically tracking the oscillations. This is a computationally expensive process; however, using the harmonic ansatz removes the oscillatory time-dependence. Simulating instead the harmonic variables of a HarmonicEquation is vastly more efficient - a steady state of the system appears as a fixed point in multidimensional space rather than an oscillatory function.
The Extention TimeEvolution is used to interface HarmonicEquation with the solvers contained in OrdinaryDiffEq.jl. Time-dependent parameter sweeps are defined using the object ParameterSweep. To use the TimeEvolution extension, one must first load the OrdinaryDiffEq.jl package.
Creates an ODEProblem object used by OrdinaryDiffEqTsit5.jl from the equations in eom to simulate time-evolution within timespan. fixed_parameters must be a dictionary mapping parameters+variables to numbers (possible to use a solution index, e.g. solutions[x][y] for branch y of solution x). If x0 is specified, it is used as an initial condition; otherwise the values from fixed_parameters are used.
Represents a sweep of one or more parameters of a HarmonicEquation. During a sweep, the selected parameters vary linearly over some timespan and are constant elsewhere.
Sweeps of different variables can be combined using +.
Fields
functions::Dict{Num, Function}: Maps each swept parameter to a function.
Examples
julia
# create a sweep of parameter a from 0 to 1 over time 0 -> 100
+julia> @variables a,b;
+julia> sweep = ParameterSweep(a => [0., 1.], (0, 100));
+julia> sweep[a](50)
+0.5
+julia> sweep[a](200)
+1.0
+
+# do the same, varying two parameters simultaneously
+julia> sweep = ParameterSweep([a => [0.,1.], b => [0., 1.]], (0,100))
',10))]),s[14]||(s[14]=i("h2",{id:"miscellaneous",tabindex:"-1"},[a("Miscellaneous "),i("a",{class:"header-anchor",href:"#miscellaneous","aria-label":'Permalink to "Miscellaneous"'},"")],-1)),s[15]||(s[15]=i("p",null,"Using a time-dependent simulation can verify solution stability in cases where the Jacobian is too expensive to compute.",-1)),i("details",c,[i("summary",null,[s[9]||(s[9]=i("a",{id:"HarmonicBalance.is_stable",href:"#HarmonicBalance.is_stable"},[i("span",{class:"jlbinding"},"HarmonicBalance.is_stable")],-1)),s[10]||(s[10]=a()),t(n,{type:"info",class:"jlObjectType jlFunction",text:"Function"})]),s[11]||(s[11]=e(`
Returns true if the solution soln of the Result res is stable. Stable solutions are real and have all Jacobian eigenvalues Re[λ] <= 0. im_tol : an absolute threshold to distinguish real/complex numbers. rel_tol: Re(λ) considered <=0 if real.(λ) < rel_tol*abs(λmax)
Given that you obtained some steady states for a parameter sweep of a specific model it can be useful to classify these solution. Let us consider a simple pametric oscillator
A steady state result for 10000 parameter points
+
+Solution branches: 5
+ of which real: 5
+ of which stable: 5
+
+Classes: stable, physical, Hopf, binary_labels
By default the steady states of the system are classified by four different catogaries:
physical: Solutions that are physical, i.e., all variables are purely real.
stable: Solutions that are stable, i.e., all eigenvalues of the Jacobian have negative real parts.
Hopf: Solutions that are physical and have exactly two Jacobian eigenvalues with positive real parts, which are complex conjugates of each other. The class can help to identify regions where a limit cycle is present due to a Hopf bifurcation. See also the tutorial on limit cycles.
binary_labels: each region in the parameter sweep receives an identifier based on its permutation of stable branches. This allows to distinguish between different phases, which may have the same number of stable solutions.
We can plot the number of stable solutions, giving the phase diagram
julia
plot_phase_diagram(result_2D, class="stable")
',7)),i("p",null,[s[9]||(s[9]=a("If we plot the a cut at ")),i("mjx-container",E,[(e(),t("svg",u,s[7]||(s[7]=[n('',1)]))),s[8]||(s[8]=i("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[i("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[i("mi",null,"λ"),i("mo",null,"="),i("mn",null,"0.01")])],-1))]),s[10]||(s[10]=a(", we see that in the blue region only one stable solution exists with zero amplitude:"))]),s[13]||(s[13]=n(`
This solution becomes stable again outside the green lobe. Also called Mathieu lobe. Indeed, we can classify the zero amplitude solution by adding an extra catagory as a class:
A steady state result for 10000 parameter points
+
+Solution branches: 5
+ of which real: 5
+ of which stable: 5
+
+Classes: zero, stable, physical, Hopf, binary_labels
Given that you obtained some steady states for a parameter sweep of a specific model it can be useful to classify these solution. Let us consider a simple pametric oscillator
A steady state result for 10000 parameter points
+
+Solution branches: 5
+ of which real: 5
+ of which stable: 5
+
+Classes: stable, physical, Hopf, binary_labels
By default the steady states of the system are classified by four different catogaries:
physical: Solutions that are physical, i.e., all variables are purely real.
stable: Solutions that are stable, i.e., all eigenvalues of the Jacobian have negative real parts.
Hopf: Solutions that are physical and have exactly two Jacobian eigenvalues with positive real parts, which are complex conjugates of each other. The class can help to identify regions where a limit cycle is present due to a Hopf bifurcation. See also the tutorial on limit cycles.
binary_labels: each region in the parameter sweep receives an identifier based on its permutation of stable branches. This allows to distinguish between different phases, which may have the same number of stable solutions.
We can plot the number of stable solutions, giving the phase diagram
julia
plot_phase_diagram(result_2D, class="stable")
',7)),i("p",null,[s[9]||(s[9]=a("If we plot the a cut at ")),i("mjx-container",E,[(e(),t("svg",u,s[7]||(s[7]=[n('',1)]))),s[8]||(s[8]=i("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[i("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[i("mi",null,"λ"),i("mo",null,"="),i("mn",null,"0.01")])],-1))]),s[10]||(s[10]=a(", we see that in the blue region only one stable solution exists with zero amplitude:"))]),s[13]||(s[13]=n(`
This solution becomes stable again outside the green lobe. Also called Mathieu lobe. Indeed, we can classify the zero amplitude solution by adding an extra catagory as a class:
A steady state result for 10000 parameter points
+
+Solution branches: 5
+ of which real: 5
+ of which stable: 5
+
+Classes: zero, stable, physical, Hopf, binary_labels
',13))])}const x=l(r,[["render",y]]);export{T as __pageData,x as default};
diff --git a/v0.10.10/assets/tutorials_index.md.B0jJeTpQ.js b/v0.10.10/assets/tutorials_index.md.B0jJeTpQ.js
new file mode 100644
index 00000000..71080546
--- /dev/null
+++ b/v0.10.10/assets/tutorials_index.md.B0jJeTpQ.js
@@ -0,0 +1 @@
+import{G as n}from"./chunks/Gallery.DAhutJQk.js";import{d as o,c as i,j as t,a as s,G as r,o as l}from"./chunks/framework.TrWZWXe1.js";const u=JSON.parse('{"title":"Tutorials","description":"","frontmatter":{},"headers":[],"relativePath":"tutorials/index.md","filePath":"tutorials/index.md"}'),c={name:"tutorials/index.md"},g=o({...c,setup(p){const a=[{href:"steady_states",src:"https://raw.githubusercontent.com/NonlinearOscillations/HarmonicBalance.jl/gh-pages/v0.10.2/assets/simple_Duffing/response_single.png",caption:"Steady states",desc:"How to get the steady states of the harmonic equations."},{href:"classification",src:"https://raw.githubusercontent.com/NonlinearOscillations/HarmonicBalance.jl/gh-pages/v0.10.2/assets/parametron/2d_phase_diagram.png",caption:"Classifying solutions",desc:"Learn how to add different types of drives."},{href:"linear_response",src:"https://raw.githubusercontent.com/NonlinearOscillations/HarmonicBalance.jl/gh-pages/v0.10.2/assets/linear_response/nonlin_F_noise.png",caption:"Linear response",desc:"Learn how to compute the linear response of a steady state."},{href:"time_dependent",src:"https://raw.githubusercontent.com/NonlinearOscillations/HarmonicBalance.jl/gh-pages/v0.10.2/assets/time_dependent/evo_to_steady.png",caption:"Stroboscopic evolution",desc:"Learn how to investigate stroboscopic time evolution."},{href:"limit_cycles",src:"https://raw.githubusercontent.com/NonlinearOscillations/HarmonicBalance.jl/gh-pages/v0.10.2/assets/limit_cycles/vdp_degenerate.png",caption:"Limit cycles",desc:"Learn how to find the limit cycles of your system."}];return(d,e)=>(l(),i("div",null,[e[0]||(e[0]=t("h1",{id:"tutorials",tabindex:"-1"},[s("Tutorials "),t("a",{class:"header-anchor",href:"#tutorials","aria-label":'Permalink to "Tutorials {#tutorials}"'},"")],-1)),e[1]||(e[1]=t("p",null,[s("We show the capabilities of the package by providing a series of tutorials. Examples of other systems can be found in the "),t("a",{href:"/HarmonicBalance.jl/v0.10.10/examples/index#examples"},"examples"),s(" tab.")],-1)),r(n,{images:a})]))}});export{u as __pageData,g as default};
diff --git a/v0.10.10/assets/tutorials_index.md.B0jJeTpQ.lean.js b/v0.10.10/assets/tutorials_index.md.B0jJeTpQ.lean.js
new file mode 100644
index 00000000..71080546
--- /dev/null
+++ b/v0.10.10/assets/tutorials_index.md.B0jJeTpQ.lean.js
@@ -0,0 +1 @@
+import{G as n}from"./chunks/Gallery.DAhutJQk.js";import{d as o,c as i,j as t,a as s,G as r,o as l}from"./chunks/framework.TrWZWXe1.js";const u=JSON.parse('{"title":"Tutorials","description":"","frontmatter":{},"headers":[],"relativePath":"tutorials/index.md","filePath":"tutorials/index.md"}'),c={name:"tutorials/index.md"},g=o({...c,setup(p){const a=[{href:"steady_states",src:"https://raw.githubusercontent.com/NonlinearOscillations/HarmonicBalance.jl/gh-pages/v0.10.2/assets/simple_Duffing/response_single.png",caption:"Steady states",desc:"How to get the steady states of the harmonic equations."},{href:"classification",src:"https://raw.githubusercontent.com/NonlinearOscillations/HarmonicBalance.jl/gh-pages/v0.10.2/assets/parametron/2d_phase_diagram.png",caption:"Classifying solutions",desc:"Learn how to add different types of drives."},{href:"linear_response",src:"https://raw.githubusercontent.com/NonlinearOscillations/HarmonicBalance.jl/gh-pages/v0.10.2/assets/linear_response/nonlin_F_noise.png",caption:"Linear response",desc:"Learn how to compute the linear response of a steady state."},{href:"time_dependent",src:"https://raw.githubusercontent.com/NonlinearOscillations/HarmonicBalance.jl/gh-pages/v0.10.2/assets/time_dependent/evo_to_steady.png",caption:"Stroboscopic evolution",desc:"Learn how to investigate stroboscopic time evolution."},{href:"limit_cycles",src:"https://raw.githubusercontent.com/NonlinearOscillations/HarmonicBalance.jl/gh-pages/v0.10.2/assets/limit_cycles/vdp_degenerate.png",caption:"Limit cycles",desc:"Learn how to find the limit cycles of your system."}];return(d,e)=>(l(),i("div",null,[e[0]||(e[0]=t("h1",{id:"tutorials",tabindex:"-1"},[s("Tutorials "),t("a",{class:"header-anchor",href:"#tutorials","aria-label":'Permalink to "Tutorials {#tutorials}"'},"")],-1)),e[1]||(e[1]=t("p",null,[s("We show the capabilities of the package by providing a series of tutorials. Examples of other systems can be found in the "),t("a",{href:"/HarmonicBalance.jl/v0.10.10/examples/index#examples"},"examples"),s(" tab.")],-1)),r(n,{images:a})]))}});export{u as __pageData,g as default};
diff --git a/v0.10.10/assets/tutorials_limit_cycles.md.DFBxkZPP.js b/v0.10.10/assets/tutorials_limit_cycles.md.DFBxkZPP.js
new file mode 100644
index 00000000..c96348ae
--- /dev/null
+++ b/v0.10.10/assets/tutorials_limit_cycles.md.DFBxkZPP.js
@@ -0,0 +1,91 @@
+import{_ as n,c as e,a4 as i,j as t,a,o as l}from"./chunks/framework.TrWZWXe1.js";const T="/HarmonicBalance.jl/v0.10.10/assets/oupuyzd.BpQQovsc.png",Q="/HarmonicBalance.jl/v0.10.10/assets/nskzule.B3J9_Und.png",r="/HarmonicBalance.jl/v0.10.10/assets/noooogl.BsfZD08c.png",o="/HarmonicBalance.jl/v0.10.10/assets/deafupc.CHIeT_aH.png",p="/HarmonicBalance.jl/v0.10.10/assets/zlfivvs.D8_LTNKe.png",u1=JSON.parse('{"title":"Limit cycles","description":"","frontmatter":{},"headers":[],"relativePath":"tutorials/limit_cycles.md","filePath":"tutorials/limit_cycles.md"}'),d={name:"tutorials/limit_cycles.md"},h={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},m={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"3.871ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 1711 1000","aria-hidden":"true"},k={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},u={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.357ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.764ex",height:"1.359ex",role:"img",focusable:"false",viewBox:"0 -443 1221.9 600.8","aria-hidden":"true"},g={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},c={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.357ex"},xmlns:"http://www.w3.org/2000/svg",width:"3.896ex",height:"1.861ex",role:"img",focusable:"false",viewBox:"0 -665 1721.9 822.8","aria-hidden":"true"},f={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},y={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.357ex"},xmlns:"http://www.w3.org/2000/svg",width:"3.896ex",height:"1.864ex",role:"img",focusable:"false",viewBox:"0 -666 1721.9 823.8","aria-hidden":"true"},v={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},x={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.357ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.764ex",height:"1.359ex",role:"img",focusable:"false",viewBox:"0 -443 1221.9 600.8","aria-hidden":"true"},w={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},E={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.357ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.764ex",height:"1.359ex",role:"img",focusable:"false",viewBox:"0 -443 1221.9 600.8","aria-hidden":"true"},H={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},D={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-1.575ex"},xmlns:"http://www.w3.org/2000/svg",width:"19.987ex",height:"4.878ex",role:"img",focusable:"false",viewBox:"0 -1460 8834.1 2156","aria-hidden":"true"},b={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},F={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"4.799ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 2121 1000","aria-hidden":"true"},M={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},L={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"4.844ex",height:"2.672ex",role:"img",focusable:"false",viewBox:"0 -931 2141 1181","aria-hidden":"true"},V={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},C={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"4.799ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 2121 1000","aria-hidden":"true"},Z={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},j={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.339ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.282ex",height:"1.339ex",role:"img",focusable:"false",viewBox:"0 -442 1008.6 592","aria-hidden":"true"},B={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},A={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.339ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.282ex",height:"1.339ex",role:"img",focusable:"false",viewBox:"0 -442 1008.6 592","aria-hidden":"true"},_={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},q={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-2.368ex"},xmlns:"http://www.w3.org/2000/svg",width:"50.887ex",height:"5.866ex",role:"img",focusable:"false",viewBox:"0 -1546.5 22491.9 2593","aria-hidden":"true"},J={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},O={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},R={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},S={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},z={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},G={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.375ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.442ex",height:"1.913ex",role:"img",focusable:"false",viewBox:"0 -680 1079.6 845.6","aria-hidden":"true"},X={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},P={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.375ex"},xmlns:"http://www.w3.org/2000/svg",width:"10.613ex",height:"1.913ex",role:"img",focusable:"false",viewBox:"0 -680 4691.1 845.6","aria-hidden":"true"},N={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},I={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.375ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.442ex",height:"1.913ex",role:"img",focusable:"false",viewBox:"0 -680 1079.6 845.6","aria-hidden":"true"},W={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},$={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.375ex"},xmlns:"http://www.w3.org/2000/svg",width:"10.613ex",height:"1.913ex",role:"img",focusable:"false",viewBox:"0 -680 4691.1 845.6","aria-hidden":"true"},K={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},U={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.375ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.442ex",height:"1.913ex",role:"img",focusable:"false",viewBox:"0 -680 1079.6 845.6","aria-hidden":"true"},Y={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},t1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.375ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.442ex",height:"1.913ex",role:"img",focusable:"false",viewBox:"0 -680 1079.6 845.6","aria-hidden":"true"},s1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},a1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.186ex"},xmlns:"http://www.w3.org/2000/svg",width:"7.927ex",height:"1.717ex",role:"img",focusable:"false",viewBox:"0 -677 3503.6 759","aria-hidden":"true"},i1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},e1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"5.635ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 2490.6 1000","aria-hidden":"true"},l1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},n1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.294ex",height:"1.025ex",role:"img",focusable:"false",viewBox:"0 -442 572 453","aria-hidden":"true"},T1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},Q1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.097ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 485 454","aria-hidden":"true"};function r1(o1,s,p1,d1,h1,m1){return l(),e("div",null,[s[103]||(s[103]=i(`
In contrast to the previous tutorials, limit cycle problems feature harmonic(s) whose numerical value is not imposed externally. We shall construct our HarmonicEquation as usual, but identify this harmonic as an extra variable, rather than a fixed parameter.
Here we solve the equation of motion of the van der Pol oscillator. This is a single-variable second-order ODE with continuous time-translation symmetry (i.e., no 'clock' imposing a frequency and/or phase), which displays periodic solutions known as relaxation oscillations. For more detail, refer also to arXiv:2308.06092.
`,4)),t("p",null,[s[15]||(s[15]=a("So far, ")),t("mjx-container",v,[(l(),e("svg",x,s[13]||(s[13]=[i('',1)]))),s[14]||(s[14]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"ω"),t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",null,"l"),t("mi",null,"c")])])])],-1))]),s[16]||(s[16]=a(" appears as any other harmonic. However, it is not fixed by any external drive or 'clock', instead, it emerges out of a Hopf instability in the system. We can verify that fixing ")),s[17]||(s[17]=t("code",null,"ω_lc",-1)),s[18]||(s[18]=a(" and calling ")),s[19]||(s[19]=t("code",null,"get_steady_states",-1)),s[20]||(s[20]=a("."))]),s[105]||(s[105]=i('
',2)),t("p",null,[s[23]||(s[23]=a("Taking instead ")),t("mjx-container",w,[(l(),e("svg",E,s[21]||(s[21]=[i('',1)]))),s[22]||(s[22]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"ω"),t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",null,"l"),t("mi",null,"c")])])])],-1))]),s[24]||(s[24]=a(" as a variable to be solved for ")),s[25]||(s[25]=t("a",{href:"/HarmonicBalance.jl/v0.10.10/background/limit_cycles#limit_cycles_bg"},"results in a phase freedom",-1)),s[26]||(s[26]=a(", implying an infinite number of solutions. To perform the ")),s[27]||(s[27]=t("a",{href:"/HarmonicBalance.jl/v0.10.10/background/limit_cycles#gauge_fixing"},"gauge-fixing procedure",-1)),s[28]||(s[28]=a(", we call ")),s[29]||(s[29]=t("code",null,"get_limit_cycles",-1)),s[30]||(s[30]=a(", marking the limit cycle harmonic as a keyword argument,"))]),s[106]||(s[106]=i(`
julia
result = get_limit_cycles(harmonic_eq, μ => 1:0.1:5, (), ω_lc)
A steady state result for 41 parameter points
+
+Solution branches: 100
+ of which real: 4
+ of which stable: 4
+
+Classes: unique_cycle, stable, physical, Hopf, binary_labels
So far, we have largely focused on finding and analysing steady states, i.e., fixed points of the harmonic equations, which satisfy
',10)),t("mjx-container",H,[(l(),e("svg",D,s[31]||(s[31]=[i('',1)]))),s[32]||(s[32]=t("mjx-assistive-mml",{unselectable:"on",display:"block",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",overflow:"hidden",width:"100%"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML",display:"block"},[t("mfrac",null,[t("mrow",null,[t("mi",null,"d"),t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",{mathvariant:"bold"},"u")]),t("mo",{stretchy:"false"},"("),t("mi",null,"T"),t("mo",{stretchy:"false"},")")]),t("mrow",null,[t("mi",null,"d"),t("mi",null,"T")])]),t("mo",null,"="),t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",{mathvariant:"bold"},"F")]),t("mo",{stretchy:"false"},"¯")])]),t("mo",{stretchy:"false"},"("),t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",{mathvariant:"bold"},"u")]),t("mo",{stretchy:"false"},")"),t("mo",null,"="),t("mn",null,"0"),t("mstyle",{scriptlevel:"0"},[t("mspace",{width:"0.167em"})]),t("mo",null,".")])],-1))]),t("p",null,[s[37]||(s[37]=a("Fixed points are however merely a subset of possible solutions of Eq. \\eqref{eq:harmeqfull} – strictly speaking, solutions where ")),t("mjx-container",b,[(l(),e("svg",F,s[33]||(s[33]=[i('',1)]))),s[34]||(s[34]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",{mathvariant:"bold"},"u")]),t("mo",{stretchy:"false"},"("),t("mi",null,"T"),t("mo",{stretchy:"false"},")")])],-1))]),s[38]||(s[38]=a(" remains time-dependent are allowed. These are quite unusual, since ")),t("mjx-container",M,[(l(),e("svg",L,s[35]||(s[35]=[i('',1)]))),s[36]||(s[36]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",{mathvariant:"bold"},"F")]),t("mo",{stretchy:"false"},"¯")])]),t("mo",{stretchy:"false"},"("),t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",{mathvariant:"bold"},"u")]),t("mo",{stretchy:"false"},")")])],-1))]),s[39]||(s[39]=a()),s[40]||(s[40]=t("a",{href:"/HarmonicBalance.jl/v0.10.10/background/harmonic_balance#intro_hb"},"is by construction time-independent",-1)),s[41]||(s[41]=a(" and Eq. \\eqref{eq:harmeqfull} thus possesses ")),s[42]||(s[42]=t("em",null,"continuous time-translation symmetry",-1)),s[43]||(s[43]=a(". The appearance of explicitly time-dependent solutions then consitutes spontaneous time-translation symmetry breaking."))]),t("p",null,[s[46]||(s[46]=a("Such solutions, known as ")),s[47]||(s[47]=t("em",null,"limit cycles",-1)),s[48]||(s[48]=a(", typically appear as closed periodic trajectories of the harmonic variables ")),t("mjx-container",V,[(l(),e("svg",C,s[44]||(s[44]=[i('',1)]))),s[45]||(s[45]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",{mathvariant:"bold"},"u")]),t("mo",{stretchy:"false"},"("),t("mi",null,"T"),t("mo",{stretchy:"false"},")")])],-1))]),s[49]||(s[49]=a(". The simplest way to numerically characterise them is a time-dependent simulation, using a steady-state diagram as a guide."))]),t("p",null,[s[54]||(s[54]=a("Here we reconstruct the results of ")),s[55]||(s[55]=t("a",{href:"https://journals.aps.org/pra/abstract/10.1103/PhysRevA.102.023526",target:"_blank",rel:"noreferrer"},"Zambon et al., Phys Rev. A 102, 023526 (2020)",-1)),s[56]||(s[56]=a(", where limit cycles are shown to appear in a system of two coupled nonlinear oscillators. In this problem, two oscillators ")),t("mjx-container",Z,[(l(),e("svg",j,s[50]||(s[50]=[i('',1)]))),s[51]||(s[51]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"x"),t("mn",null,"1")])])],-1))]),s[57]||(s[57]=a(" and ")),t("mjx-container",B,[(l(),e("svg",A,s[52]||(s[52]=[i('',1)]))),s[53]||(s[53]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"x"),t("mn",null,"2")])])],-1))]),s[58]||(s[58]=a(", have (the same) damping and Kerr nonlinearity and are linearly coupled,"))]),t("mjx-container",_,[(l(),e("svg",q,s[59]||(s[59]=[i('',1)]))),s[60]||(s[60]=t("mjx-assistive-mml",{unselectable:"on",display:"block",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",overflow:"hidden",width:"100%"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML",display:"block"},[t("mtable",{displaystyle:"true",columnalign:"right left",columnspacing:"0em",rowspacing:"3pt"},[t("mtr",null,[t("mtd",null,[t("msub",null,[t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"¨")])]),t("mn",null,"1")]),t("mo",null,"+"),t("mi",null,"γ"),t("msub",null,[t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"˙")])]),t("mn",null,"1")]),t("mo",null,"+"),t("msubsup",null,[t("mi",null,"ω"),t("mn",null,"0"),t("mn",null,"2")]),t("msub",null,[t("mi",null,"x"),t("mn",null,"1")]),t("mo",null,"+"),t("mi",null,"α"),t("msubsup",null,[t("mi",null,"x"),t("mn",null,"1"),t("mn",null,"3")]),t("mo",null,"+"),t("mn",null,"2"),t("mi",null,"J"),t("mo",{stretchy:"false"},"("),t("msub",null,[t("mi",null,"x"),t("mn",null,"1")]),t("mo",null,"−"),t("msub",null,[t("mi",null,"x"),t("mn",null,"2")]),t("mo",{stretchy:"false"},")")]),t("mtd",null,[t("mi"),t("mo",null,"="),t("msub",null,[t("mi",null,"F"),t("mn",null,"0")]),t("mi",null,"cos"),t("mo",{"data-mjx-texclass":"NONE"},""),t("mo",{stretchy:"false"},"("),t("mi",null,"ω"),t("mi",null,"t"),t("mo",{stretchy:"false"},")")])]),t("mtr",null,[t("mtd",null,[t("msub",null,[t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"¨")])]),t("mn",null,"2")]),t("mo",null,"+"),t("mi",null,"γ"),t("msub",null,[t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"˙")])]),t("mn",null,"2")]),t("mo",null,"+"),t("msubsup",null,[t("mi",null,"ω"),t("mn",null,"0"),t("mn",null,"2")]),t("msub",null,[t("mi",null,"x"),t("mn",null,"2")]),t("mo",null,"+"),t("mi",null,"α"),t("msubsup",null,[t("mi",null,"x"),t("mn",null,"2"),t("mn",null,"3")]),t("mo",null,"+"),t("mn",null,"2"),t("mi",null,"J"),t("mo",{stretchy:"false"},"("),t("msub",null,[t("mi",null,"x"),t("mn",null,"2")]),t("mo",null,"−"),t("msub",null,[t("mi",null,"x"),t("mn",null,"1")]),t("mo",{stretchy:"false"},")")]),t("mtd",null,[t("mi"),t("mo",null,"="),t("mi",null,"η"),t("msub",null,[t("mi",null,"F"),t("mn",null,"0")]),t("mi",null,"cos"),t("mo",{"data-mjx-texclass":"NONE"},""),t("mo",{stretchy:"false"},"("),t("mi",null,"ω"),t("mi",null,"t"),t("mo",{stretchy:"false"},")")])])])])],-1))]),s[107]||(s[107]=i(`
julia
using HarmonicBalance
+@variables γ F α ω0 F0 η ω J t x(t) y(t);
+eqs = [d(x,t,2) + γ*d(x,t) + ω0^2*x + α*x^3+ 2*J*ω0*(x-y) - F0*cos(ω*t),
+ d(y,t,2) + γ * d(y,t) + ω0^2 * y + α*y^3 + 2*J*ω0*(y-x) - η*F0*cos(ω*t)]
+diff_eq = DifferentialEquation(eqs, [x,y])
`,2)),t("p",null,[s[70]||(s[70]=a("Solving for a range of drive amplitudes ")),t("mjx-container",z,[(l(),e("svg",G,s[68]||(s[68]=[i('',1)]))),s[69]||(s[69]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"F"),t("mn",null,"0")])])],-1))]),s[71]||(s[71]=a(","))]),s[109]||(s[109]=i(`
julia
fixed = (
+ ω0 => 1.4504859, # natural frequency of separate modes (in paper's notation, ħω0 - J)
+ γ => 27.4e-6, # damping
+ J => 154.1e-6, # coupling term
+ α => 3.867e-7, # Kerr nonlinearity
+ ω => 1.4507941, # pump frequency, resonant with antisymmetric mode (in paper, ħω0 + J)
+ η => -0.08, # pumping leaking to site 2 (F2 = ηF1)
+ F0 => 0.002 # pump amplitude (overriden in sweeps)
+)
+varied = F0 => range(0.002, 0.03, 50)
+
+result = get_steady_states(harmonic_eq, varied, fixed)
A steady state result for 50 parameter points
+
+Solution branches: 9
+ of which real: 3
+ of which stable: 2
+
+Classes: stable, physical, Hopf, binary_labels
',5)),t("p",null,[s[78]||(s[78]=a("According to Zambon et al., a limit cycle solution exists around ")),t("mjx-container",X,[(l(),e("svg",P,s[72]||(s[72]=[i('',1)]))),s[73]||(s[73]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"F"),t("mn",null,"0")]),t("mo",null,"≅"),t("mn",null,"0.011")])],-1))]),s[79]||(s[79]=a(", which can be accessed by a jump from branch 1 in an upwards sweep of ")),t("mjx-container",N,[(l(),e("svg",I,s[74]||(s[74]=[i('',1)]))),s[75]||(s[75]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"F"),t("mn",null,"0")])])],-1))]),s[80]||(s[80]=a(". Since a limit cycle is not a steady state of our harmonic equations, it does not appear in the diagram. We do however see that branch 1 ceases to be stable around ")),t("mjx-container",W,[(l(),e("svg",$,s[76]||(s[76]=[i('',1)]))),s[77]||(s[77]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"F"),t("mn",null,"0")]),t("mo",null,"≅"),t("mn",null,"0.010")])],-1))]),s[81]||(s[81]=a(", meaning a jump should occur."))]),t("p",null,[s[86]||(s[86]=a("Let us try and simulate the limit cycle. We could in principle run a time-dependent simulation with a fixed value of ")),t("mjx-container",K,[(l(),e("svg",U,s[82]||(s[82]=[i('',1)]))),s[83]||(s[83]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"F"),t("mn",null,"0")])])],-1))]),s[87]||(s[87]=a(", but this would require a suitable initial condition. Instead, we will sweep ")),t("mjx-container",Y,[(l(),e("svg",t1,s[84]||(s[84]=[i('',1)]))),s[85]||(s[85]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"F"),t("mn",null,"0")])])],-1))]),s[88]||(s[88]=a(" upwards from a low starting value. To observe the dynamics just after the jump has occurred, we follow the sweep by a time interval where the system evolves under fixed parameters."))]),s[110]||(s[110]=i(`
julia
using OrdinaryDiffEqTsit5
+initial_state = result[1][1]
+
+T = 2e6
+sweep = ParameterSweep(F0 => (0.002, 0.011), (0,T))
+
+# start from initial_state, use sweep, total time is 2*T
+time_problem = ODEProblem(harmonic_eq, initial_state, sweep=sweep, timespan=(0,2*T))
+time_evo = solve(time_problem, Tsit5(), saveat=100);
Inspecting the amplitude as a function of time,
julia
plot(time_evo, "sqrt(u1^2 + v1^2)", harmonic_eq)
',4)),t("p",null,[s[93]||(s[93]=a("we see that initially the sweep is adiabatic as it proceeds along the steady-state branch 1. At around ")),t("mjx-container",s1,[(l(),e("svg",a1,s[89]||(s[89]=[i('',1)]))),s[90]||(s[90]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"T"),t("mo",null,"="),t("mn",null,"2"),t("mi",null,"e"),t("mn",null,"6")])],-1))]),s[94]||(s[94]=a(", an instability occurs and ")),t("mjx-container",i1,[(l(),e("svg",e1,s[91]||(s[91]=[i('',1)]))),s[92]||(s[92]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"u"),t("mn",null,"1")]),t("mo",{stretchy:"false"},"("),t("mi",null,"T"),t("mo",{stretchy:"false"},")")])],-1))]),s[95]||(s[95]=a(" starts to rapidly oscillate. At that point, the sweep is stopped. Under free time evolution, the system then settles into a limit-cycle solution where the coordinates move along closed trajectories."))]),t("p",null,[s[100]||(s[100]=a("By plotting the ")),t("mjx-container",l1,[(l(),e("svg",n1,s[96]||(s[96]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D462",d:"M21 287Q21 295 30 318T55 370T99 420T158 442Q204 442 227 417T250 358Q250 340 216 246T182 105Q182 62 196 45T238 27T291 44T328 78L339 95Q341 99 377 247Q407 367 413 387T427 416Q444 431 463 431Q480 431 488 421T496 402L420 84Q419 79 419 68Q419 43 426 35T447 26Q469 29 482 57T512 145Q514 153 532 153Q551 153 551 144Q550 139 549 130T540 98T523 55T498 17T462 -8Q454 -10 438 -10Q372 -10 347 46Q345 45 336 36T318 21T296 6T267 -6T233 -11Q189 -11 155 7Q103 38 103 113Q103 170 138 262T173 379Q173 380 173 381Q173 390 173 393T169 400T158 404H154Q131 404 112 385T82 344T65 302T57 280Q55 278 41 278H27Q21 284 21 287Z",style:{"stroke-width":"3"}})])])],-1)]))),s[97]||(s[97]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"u")])],-1))]),s[101]||(s[101]=a(" and ")),t("mjx-container",T1,[(l(),e("svg",Q1,s[98]||(s[98]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D463",d:"M173 380Q173 405 154 405Q130 405 104 376T61 287Q60 286 59 284T58 281T56 279T53 278T49 278T41 278H27Q21 284 21 287Q21 294 29 316T53 368T97 419T160 441Q202 441 225 417T249 361Q249 344 246 335Q246 329 231 291T200 202T182 113Q182 86 187 69Q200 26 250 26Q287 26 319 60T369 139T398 222T409 277Q409 300 401 317T383 343T365 361T357 383Q357 405 376 424T417 443Q436 443 451 425T467 367Q467 340 455 284T418 159T347 40T241 -11Q177 -11 139 22Q102 54 102 117Q102 148 110 181T151 298Q173 362 173 380Z",style:{"stroke-width":"3"}})])])],-1)]))),s[99]||(s[99]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"v")])],-1))]),s[102]||(s[102]=a(" variables against each other, we observe the limit cycle shapes in phase space,"))]),s[111]||(s[111]=i(`
In contrast to the previous tutorials, limit cycle problems feature harmonic(s) whose numerical value is not imposed externally. We shall construct our HarmonicEquation as usual, but identify this harmonic as an extra variable, rather than a fixed parameter.
Here we solve the equation of motion of the van der Pol oscillator. This is a single-variable second-order ODE with continuous time-translation symmetry (i.e., no 'clock' imposing a frequency and/or phase), which displays periodic solutions known as relaxation oscillations. For more detail, refer also to arXiv:2308.06092.
`,4)),t("p",null,[s[15]||(s[15]=a("So far, ")),t("mjx-container",v,[(l(),e("svg",x,s[13]||(s[13]=[i('',1)]))),s[14]||(s[14]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"ω"),t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",null,"l"),t("mi",null,"c")])])])],-1))]),s[16]||(s[16]=a(" appears as any other harmonic. However, it is not fixed by any external drive or 'clock', instead, it emerges out of a Hopf instability in the system. We can verify that fixing ")),s[17]||(s[17]=t("code",null,"ω_lc",-1)),s[18]||(s[18]=a(" and calling ")),s[19]||(s[19]=t("code",null,"get_steady_states",-1)),s[20]||(s[20]=a("."))]),s[105]||(s[105]=i('
',2)),t("p",null,[s[23]||(s[23]=a("Taking instead ")),t("mjx-container",w,[(l(),e("svg",E,s[21]||(s[21]=[i('',1)]))),s[22]||(s[22]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"ω"),t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",null,"l"),t("mi",null,"c")])])])],-1))]),s[24]||(s[24]=a(" as a variable to be solved for ")),s[25]||(s[25]=t("a",{href:"/HarmonicBalance.jl/v0.10.10/background/limit_cycles#limit_cycles_bg"},"results in a phase freedom",-1)),s[26]||(s[26]=a(", implying an infinite number of solutions. To perform the ")),s[27]||(s[27]=t("a",{href:"/HarmonicBalance.jl/v0.10.10/background/limit_cycles#gauge_fixing"},"gauge-fixing procedure",-1)),s[28]||(s[28]=a(", we call ")),s[29]||(s[29]=t("code",null,"get_limit_cycles",-1)),s[30]||(s[30]=a(", marking the limit cycle harmonic as a keyword argument,"))]),s[106]||(s[106]=i(`
julia
result = get_limit_cycles(harmonic_eq, μ => 1:0.1:5, (), ω_lc)
A steady state result for 41 parameter points
+
+Solution branches: 100
+ of which real: 4
+ of which stable: 4
+
+Classes: unique_cycle, stable, physical, Hopf, binary_labels
So far, we have largely focused on finding and analysing steady states, i.e., fixed points of the harmonic equations, which satisfy
',10)),t("mjx-container",H,[(l(),e("svg",D,s[31]||(s[31]=[i('',1)]))),s[32]||(s[32]=t("mjx-assistive-mml",{unselectable:"on",display:"block",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",overflow:"hidden",width:"100%"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML",display:"block"},[t("mfrac",null,[t("mrow",null,[t("mi",null,"d"),t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",{mathvariant:"bold"},"u")]),t("mo",{stretchy:"false"},"("),t("mi",null,"T"),t("mo",{stretchy:"false"},")")]),t("mrow",null,[t("mi",null,"d"),t("mi",null,"T")])]),t("mo",null,"="),t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",{mathvariant:"bold"},"F")]),t("mo",{stretchy:"false"},"¯")])]),t("mo",{stretchy:"false"},"("),t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",{mathvariant:"bold"},"u")]),t("mo",{stretchy:"false"},")"),t("mo",null,"="),t("mn",null,"0"),t("mstyle",{scriptlevel:"0"},[t("mspace",{width:"0.167em"})]),t("mo",null,".")])],-1))]),t("p",null,[s[37]||(s[37]=a("Fixed points are however merely a subset of possible solutions of Eq. \\eqref{eq:harmeqfull} – strictly speaking, solutions where ")),t("mjx-container",b,[(l(),e("svg",F,s[33]||(s[33]=[i('',1)]))),s[34]||(s[34]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",{mathvariant:"bold"},"u")]),t("mo",{stretchy:"false"},"("),t("mi",null,"T"),t("mo",{stretchy:"false"},")")])],-1))]),s[38]||(s[38]=a(" remains time-dependent are allowed. These are quite unusual, since ")),t("mjx-container",M,[(l(),e("svg",L,s[35]||(s[35]=[i('',1)]))),s[36]||(s[36]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",{mathvariant:"bold"},"F")]),t("mo",{stretchy:"false"},"¯")])]),t("mo",{stretchy:"false"},"("),t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",{mathvariant:"bold"},"u")]),t("mo",{stretchy:"false"},")")])],-1))]),s[39]||(s[39]=a()),s[40]||(s[40]=t("a",{href:"/HarmonicBalance.jl/v0.10.10/background/harmonic_balance#intro_hb"},"is by construction time-independent",-1)),s[41]||(s[41]=a(" and Eq. \\eqref{eq:harmeqfull} thus possesses ")),s[42]||(s[42]=t("em",null,"continuous time-translation symmetry",-1)),s[43]||(s[43]=a(". The appearance of explicitly time-dependent solutions then consitutes spontaneous time-translation symmetry breaking."))]),t("p",null,[s[46]||(s[46]=a("Such solutions, known as ")),s[47]||(s[47]=t("em",null,"limit cycles",-1)),s[48]||(s[48]=a(", typically appear as closed periodic trajectories of the harmonic variables ")),t("mjx-container",V,[(l(),e("svg",C,s[44]||(s[44]=[i('',1)]))),s[45]||(s[45]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mrow",{"data-mjx-texclass":"ORD"},[t("mi",{mathvariant:"bold"},"u")]),t("mo",{stretchy:"false"},"("),t("mi",null,"T"),t("mo",{stretchy:"false"},")")])],-1))]),s[49]||(s[49]=a(". The simplest way to numerically characterise them is a time-dependent simulation, using a steady-state diagram as a guide."))]),t("p",null,[s[54]||(s[54]=a("Here we reconstruct the results of ")),s[55]||(s[55]=t("a",{href:"https://journals.aps.org/pra/abstract/10.1103/PhysRevA.102.023526",target:"_blank",rel:"noreferrer"},"Zambon et al., Phys Rev. A 102, 023526 (2020)",-1)),s[56]||(s[56]=a(", where limit cycles are shown to appear in a system of two coupled nonlinear oscillators. In this problem, two oscillators ")),t("mjx-container",Z,[(l(),e("svg",j,s[50]||(s[50]=[i('',1)]))),s[51]||(s[51]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"x"),t("mn",null,"1")])])],-1))]),s[57]||(s[57]=a(" and ")),t("mjx-container",B,[(l(),e("svg",A,s[52]||(s[52]=[i('',1)]))),s[53]||(s[53]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"x"),t("mn",null,"2")])])],-1))]),s[58]||(s[58]=a(", have (the same) damping and Kerr nonlinearity and are linearly coupled,"))]),t("mjx-container",_,[(l(),e("svg",q,s[59]||(s[59]=[i('',1)]))),s[60]||(s[60]=t("mjx-assistive-mml",{unselectable:"on",display:"block",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",overflow:"hidden",width:"100%"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML",display:"block"},[t("mtable",{displaystyle:"true",columnalign:"right left",columnspacing:"0em",rowspacing:"3pt"},[t("mtr",null,[t("mtd",null,[t("msub",null,[t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"¨")])]),t("mn",null,"1")]),t("mo",null,"+"),t("mi",null,"γ"),t("msub",null,[t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"˙")])]),t("mn",null,"1")]),t("mo",null,"+"),t("msubsup",null,[t("mi",null,"ω"),t("mn",null,"0"),t("mn",null,"2")]),t("msub",null,[t("mi",null,"x"),t("mn",null,"1")]),t("mo",null,"+"),t("mi",null,"α"),t("msubsup",null,[t("mi",null,"x"),t("mn",null,"1"),t("mn",null,"3")]),t("mo",null,"+"),t("mn",null,"2"),t("mi",null,"J"),t("mo",{stretchy:"false"},"("),t("msub",null,[t("mi",null,"x"),t("mn",null,"1")]),t("mo",null,"−"),t("msub",null,[t("mi",null,"x"),t("mn",null,"2")]),t("mo",{stretchy:"false"},")")]),t("mtd",null,[t("mi"),t("mo",null,"="),t("msub",null,[t("mi",null,"F"),t("mn",null,"0")]),t("mi",null,"cos"),t("mo",{"data-mjx-texclass":"NONE"},""),t("mo",{stretchy:"false"},"("),t("mi",null,"ω"),t("mi",null,"t"),t("mo",{stretchy:"false"},")")])]),t("mtr",null,[t("mtd",null,[t("msub",null,[t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"¨")])]),t("mn",null,"2")]),t("mo",null,"+"),t("mi",null,"γ"),t("msub",null,[t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"˙")])]),t("mn",null,"2")]),t("mo",null,"+"),t("msubsup",null,[t("mi",null,"ω"),t("mn",null,"0"),t("mn",null,"2")]),t("msub",null,[t("mi",null,"x"),t("mn",null,"2")]),t("mo",null,"+"),t("mi",null,"α"),t("msubsup",null,[t("mi",null,"x"),t("mn",null,"2"),t("mn",null,"3")]),t("mo",null,"+"),t("mn",null,"2"),t("mi",null,"J"),t("mo",{stretchy:"false"},"("),t("msub",null,[t("mi",null,"x"),t("mn",null,"2")]),t("mo",null,"−"),t("msub",null,[t("mi",null,"x"),t("mn",null,"1")]),t("mo",{stretchy:"false"},")")]),t("mtd",null,[t("mi"),t("mo",null,"="),t("mi",null,"η"),t("msub",null,[t("mi",null,"F"),t("mn",null,"0")]),t("mi",null,"cos"),t("mo",{"data-mjx-texclass":"NONE"},""),t("mo",{stretchy:"false"},"("),t("mi",null,"ω"),t("mi",null,"t"),t("mo",{stretchy:"false"},")")])])])])],-1))]),s[107]||(s[107]=i(`
julia
using HarmonicBalance
+@variables γ F α ω0 F0 η ω J t x(t) y(t);
+eqs = [d(x,t,2) + γ*d(x,t) + ω0^2*x + α*x^3+ 2*J*ω0*(x-y) - F0*cos(ω*t),
+ d(y,t,2) + γ * d(y,t) + ω0^2 * y + α*y^3 + 2*J*ω0*(y-x) - η*F0*cos(ω*t)]
+diff_eq = DifferentialEquation(eqs, [x,y])
`,2)),t("p",null,[s[70]||(s[70]=a("Solving for a range of drive amplitudes ")),t("mjx-container",z,[(l(),e("svg",G,s[68]||(s[68]=[i('',1)]))),s[69]||(s[69]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"F"),t("mn",null,"0")])])],-1))]),s[71]||(s[71]=a(","))]),s[109]||(s[109]=i(`
julia
fixed = (
+ ω0 => 1.4504859, # natural frequency of separate modes (in paper's notation, ħω0 - J)
+ γ => 27.4e-6, # damping
+ J => 154.1e-6, # coupling term
+ α => 3.867e-7, # Kerr nonlinearity
+ ω => 1.4507941, # pump frequency, resonant with antisymmetric mode (in paper, ħω0 + J)
+ η => -0.08, # pumping leaking to site 2 (F2 = ηF1)
+ F0 => 0.002 # pump amplitude (overriden in sweeps)
+)
+varied = F0 => range(0.002, 0.03, 50)
+
+result = get_steady_states(harmonic_eq, varied, fixed)
A steady state result for 50 parameter points
+
+Solution branches: 9
+ of which real: 3
+ of which stable: 2
+
+Classes: stable, physical, Hopf, binary_labels
',5)),t("p",null,[s[78]||(s[78]=a("According to Zambon et al., a limit cycle solution exists around ")),t("mjx-container",X,[(l(),e("svg",P,s[72]||(s[72]=[i('',1)]))),s[73]||(s[73]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"F"),t("mn",null,"0")]),t("mo",null,"≅"),t("mn",null,"0.011")])],-1))]),s[79]||(s[79]=a(", which can be accessed by a jump from branch 1 in an upwards sweep of ")),t("mjx-container",N,[(l(),e("svg",I,s[74]||(s[74]=[i('',1)]))),s[75]||(s[75]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"F"),t("mn",null,"0")])])],-1))]),s[80]||(s[80]=a(". Since a limit cycle is not a steady state of our harmonic equations, it does not appear in the diagram. We do however see that branch 1 ceases to be stable around ")),t("mjx-container",W,[(l(),e("svg",$,s[76]||(s[76]=[i('',1)]))),s[77]||(s[77]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"F"),t("mn",null,"0")]),t("mo",null,"≅"),t("mn",null,"0.010")])],-1))]),s[81]||(s[81]=a(", meaning a jump should occur."))]),t("p",null,[s[86]||(s[86]=a("Let us try and simulate the limit cycle. We could in principle run a time-dependent simulation with a fixed value of ")),t("mjx-container",K,[(l(),e("svg",U,s[82]||(s[82]=[i('',1)]))),s[83]||(s[83]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"F"),t("mn",null,"0")])])],-1))]),s[87]||(s[87]=a(", but this would require a suitable initial condition. Instead, we will sweep ")),t("mjx-container",Y,[(l(),e("svg",t1,s[84]||(s[84]=[i('',1)]))),s[85]||(s[85]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"F"),t("mn",null,"0")])])],-1))]),s[88]||(s[88]=a(" upwards from a low starting value. To observe the dynamics just after the jump has occurred, we follow the sweep by a time interval where the system evolves under fixed parameters."))]),s[110]||(s[110]=i(`
julia
using OrdinaryDiffEqTsit5
+initial_state = result[1][1]
+
+T = 2e6
+sweep = ParameterSweep(F0 => (0.002, 0.011), (0,T))
+
+# start from initial_state, use sweep, total time is 2*T
+time_problem = ODEProblem(harmonic_eq, initial_state, sweep=sweep, timespan=(0,2*T))
+time_evo = solve(time_problem, Tsit5(), saveat=100);
Inspecting the amplitude as a function of time,
julia
plot(time_evo, "sqrt(u1^2 + v1^2)", harmonic_eq)
',4)),t("p",null,[s[93]||(s[93]=a("we see that initially the sweep is adiabatic as it proceeds along the steady-state branch 1. At around ")),t("mjx-container",s1,[(l(),e("svg",a1,s[89]||(s[89]=[i('',1)]))),s[90]||(s[90]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"T"),t("mo",null,"="),t("mn",null,"2"),t("mi",null,"e"),t("mn",null,"6")])],-1))]),s[94]||(s[94]=a(", an instability occurs and ")),t("mjx-container",i1,[(l(),e("svg",e1,s[91]||(s[91]=[i('',1)]))),s[92]||(s[92]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msub",null,[t("mi",null,"u"),t("mn",null,"1")]),t("mo",{stretchy:"false"},"("),t("mi",null,"T"),t("mo",{stretchy:"false"},")")])],-1))]),s[95]||(s[95]=a(" starts to rapidly oscillate. At that point, the sweep is stopped. Under free time evolution, the system then settles into a limit-cycle solution where the coordinates move along closed trajectories."))]),t("p",null,[s[100]||(s[100]=a("By plotting the ")),t("mjx-container",l1,[(l(),e("svg",n1,s[96]||(s[96]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D462",d:"M21 287Q21 295 30 318T55 370T99 420T158 442Q204 442 227 417T250 358Q250 340 216 246T182 105Q182 62 196 45T238 27T291 44T328 78L339 95Q341 99 377 247Q407 367 413 387T427 416Q444 431 463 431Q480 431 488 421T496 402L420 84Q419 79 419 68Q419 43 426 35T447 26Q469 29 482 57T512 145Q514 153 532 153Q551 153 551 144Q550 139 549 130T540 98T523 55T498 17T462 -8Q454 -10 438 -10Q372 -10 347 46Q345 45 336 36T318 21T296 6T267 -6T233 -11Q189 -11 155 7Q103 38 103 113Q103 170 138 262T173 379Q173 380 173 381Q173 390 173 393T169 400T158 404H154Q131 404 112 385T82 344T65 302T57 280Q55 278 41 278H27Q21 284 21 287Z",style:{"stroke-width":"3"}})])])],-1)]))),s[97]||(s[97]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"u")])],-1))]),s[101]||(s[101]=a(" and ")),t("mjx-container",T1,[(l(),e("svg",Q1,s[98]||(s[98]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D463",d:"M173 380Q173 405 154 405Q130 405 104 376T61 287Q60 286 59 284T58 281T56 279T53 278T49 278T41 278H27Q21 284 21 287Q21 294 29 316T53 368T97 419T160 441Q202 441 225 417T249 361Q249 344 246 335Q246 329 231 291T200 202T182 113Q182 86 187 69Q200 26 250 26Q287 26 319 60T369 139T398 222T409 277Q409 300 401 317T383 343T365 361T357 383Q357 405 376 424T417 443Q436 443 451 425T467 367Q467 340 455 284T418 159T347 40T241 -11Q177 -11 139 22Q102 54 102 117Q102 148 110 181T151 298Q173 362 173 380Z",style:{"stroke-width":"3"}})])])],-1)]))),s[99]||(s[99]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"v")])],-1))]),s[102]||(s[102]=a(" variables against each other, we observe the limit cycle shapes in phase space,"))]),s[111]||(s[111]=i(`
Here we calculate the white noise response of a simple nonlinear system. A set of reference results may be found in Huber et al. in Phys. Rev. X 10, 021066 (2020). We start by defining the Duffing oscillator
julia
using HarmonicBalance, Plots
+using Plots.Measures: mm
+@variables α, ω, ω0, F, γ, t, x(t); # declare constant variables and a function x(t)
+
+# define ODE
+diff_eq = DifferentialEquation(d(x,t,2) + ω0*x + α*x^3 + γ*d(x,t) ~ F*cos(ω*t), x)
+
+# specify the ansatz x = u(T) cos(ω*t) + v(T) sin(ω*t)
+add_harmonic!(diff_eq, x, ω)
+
+# implement ansatz to get harmonic equations
+harmonic_eq = get_harmonic_equations(diff_eq)
`,6)),i("p",null,[s[2]||(s[2]=a("When driven weakly, the Duffing resonator behaves quasi-linearly, i.e, its response to noise is independent of the applied drive. We see that for weak driving, ")),i("mjx-container",E,[(e(),t("svg",m,s[0]||(s[0]=[n('',1)]))),s[1]||(s[1]=i("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[i("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[i("mi",null,"F"),i("mo",null,"="),i("msup",null,[i("mn",null,"10"),i("mrow",{"data-mjx-texclass":"ORD"},[i("mo",null,"−"),i("mn",null,"4")])])])],-1))]),s[3]||(s[3]=a(", the amplitude is a Lorentzian."))]),s[51]||(s[51]=n(`
',2)),i("p",null,[s[6]||(s[6]=a("To find the fluctuation on the top of the steady state one often employs a ")),s[7]||(s[7]=i("a",{href:"https://en.wikipedia.org/wiki/Linear_dynamical_system",target:"_blank",rel:"noreferrer"},"Bogoliubov-de Gennes analyses",-1)),s[8]||(s[8]=a(". Here, we compute the eigenvalues ")),i("mjx-container",y,[(e(),t("svg",T,s[4]||(s[4]=[n('',1)]))),s[5]||(s[5]=i("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[i("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[i("msub",null,[i("mi",null,"λ"),i("mi",null,"k")])])],-1))]),s[9]||(s[9]=a(' of the Jacobian matrix at the steady state. The imaginary part of the eigenvalues gives characteristic frequencies of the "quasi-particle excitations". The real part gives the lifetime of these excitations.'))]),s[52]||(s[52]=n(`
We find a single pair of complex conjugate eigenvalues linearly changing with the driving frequency. Both real parts are negative, indicating stability.
',5)),i("p",null,[s[30]||(s[30]=a("Again every branch gives a single pair of complex conjugate eigenvalues. However, for branch 1, the characteristic frequencies due not change linearly with the driving frequency around ")),i("mjx-container",D,[(e(),t("svg",H,s[28]||(s[28]=[n('',1)]))),s[29]||(s[29]=i("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[i("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[i("mi",null,"ω"),i("mo",null,"="),i("msub",null,[i("mi",null,"ω"),i("mn",null,"0")])])],-1))]),s[31]||(s[31]=a(". This is a sign of steady state becoming nonlinear at large amplitudes."))]),s[55]||(s[55]=n(`
In branch 1 the linear response to white noise shows more than one peak. This is a distinctly nonlinear phenomenon, indicitive if the squeezing of the steady state. Branch 2 is again quasi-linear, which stems from its low amplitude.
',4)),i("p",null,[s[36]||(s[36]=a("Following ")),s[37]||(s[37]=i("a",{href:"https://doi.org/10.1103/PhysRevX.10.021066",target:"_blank",rel:"noreferrer"},"Huber et al.",-1)),s[38]||(s[38]=a(", we may also fix ")),i("mjx-container",A,[(e(),t("svg",M,s[32]||(s[32]=[n('',1)]))),s[33]||(s[33]=i("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[i("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[i("mi",null,"ω"),i("mo",null,"="),i("msub",null,[i("mi",null,"ω"),i("mn",null,"0")])])],-1))]),s[39]||(s[39]=a(" and plot the linear response as a function of ")),i("mjx-container",L,[(e(),t("svg",j,s[34]||(s[34]=[i("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[i("g",{"data-mml-node":"math"},[i("g",{"data-mml-node":"mi"},[i("path",{"data-c":"1D439",d:"M48 1Q31 1 31 11Q31 13 34 25Q38 41 42 43T65 46Q92 46 125 49Q139 52 144 61Q146 66 215 342T285 622Q285 629 281 629Q273 632 228 634H197Q191 640 191 642T193 659Q197 676 203 680H742Q749 676 749 669Q749 664 736 557T722 447Q720 440 702 440H690Q683 445 683 453Q683 454 686 477T689 530Q689 560 682 579T663 610T626 626T575 633T503 634H480Q398 633 393 631Q388 629 386 623Q385 622 352 492L320 363H375Q378 363 398 363T426 364T448 367T472 374T489 386Q502 398 511 419T524 457T529 475Q532 480 548 480H560Q567 475 567 470Q567 467 536 339T502 207Q500 200 482 200H470Q463 206 463 212Q463 215 468 234T473 274Q473 303 453 310T364 317H309L277 190Q245 66 245 60Q245 46 334 46H359Q365 40 365 39T363 19Q359 6 353 0H336Q295 2 185 2Q120 2 86 2T48 1Z",style:{"stroke-width":"3"}})])])],-1)]))),s[35]||(s[35]=i("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[i("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[i("mi",null,"F")])],-1))]),s[40]||(s[40]=a(". The response turns out to be single-valued over a large range of driving strengths. Using a log scale for the x-axis:"))]),s[56]||(s[56]=n(`
Here we calculate the white noise response of a simple nonlinear system. A set of reference results may be found in Huber et al. in Phys. Rev. X 10, 021066 (2020). We start by defining the Duffing oscillator
julia
using HarmonicBalance, Plots
+using Plots.Measures: mm
+@variables α, ω, ω0, F, γ, t, x(t); # declare constant variables and a function x(t)
+
+# define ODE
+diff_eq = DifferentialEquation(d(x,t,2) + ω0*x + α*x^3 + γ*d(x,t) ~ F*cos(ω*t), x)
+
+# specify the ansatz x = u(T) cos(ω*t) + v(T) sin(ω*t)
+add_harmonic!(diff_eq, x, ω)
+
+# implement ansatz to get harmonic equations
+harmonic_eq = get_harmonic_equations(diff_eq)
`,6)),i("p",null,[s[2]||(s[2]=a("When driven weakly, the Duffing resonator behaves quasi-linearly, i.e, its response to noise is independent of the applied drive. We see that for weak driving, ")),i("mjx-container",E,[(e(),t("svg",m,s[0]||(s[0]=[n('',1)]))),s[1]||(s[1]=i("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[i("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[i("mi",null,"F"),i("mo",null,"="),i("msup",null,[i("mn",null,"10"),i("mrow",{"data-mjx-texclass":"ORD"},[i("mo",null,"−"),i("mn",null,"4")])])])],-1))]),s[3]||(s[3]=a(", the amplitude is a Lorentzian."))]),s[51]||(s[51]=n(`
',2)),i("p",null,[s[6]||(s[6]=a("To find the fluctuation on the top of the steady state one often employs a ")),s[7]||(s[7]=i("a",{href:"https://en.wikipedia.org/wiki/Linear_dynamical_system",target:"_blank",rel:"noreferrer"},"Bogoliubov-de Gennes analyses",-1)),s[8]||(s[8]=a(". Here, we compute the eigenvalues ")),i("mjx-container",y,[(e(),t("svg",T,s[4]||(s[4]=[n('',1)]))),s[5]||(s[5]=i("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[i("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[i("msub",null,[i("mi",null,"λ"),i("mi",null,"k")])])],-1))]),s[9]||(s[9]=a(' of the Jacobian matrix at the steady state. The imaginary part of the eigenvalues gives characteristic frequencies of the "quasi-particle excitations". The real part gives the lifetime of these excitations.'))]),s[52]||(s[52]=n(`
We find a single pair of complex conjugate eigenvalues linearly changing with the driving frequency. Both real parts are negative, indicating stability.
',5)),i("p",null,[s[30]||(s[30]=a("Again every branch gives a single pair of complex conjugate eigenvalues. However, for branch 1, the characteristic frequencies due not change linearly with the driving frequency around ")),i("mjx-container",D,[(e(),t("svg",H,s[28]||(s[28]=[n('',1)]))),s[29]||(s[29]=i("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[i("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[i("mi",null,"ω"),i("mo",null,"="),i("msub",null,[i("mi",null,"ω"),i("mn",null,"0")])])],-1))]),s[31]||(s[31]=a(". This is a sign of steady state becoming nonlinear at large amplitudes."))]),s[55]||(s[55]=n(`
In branch 1 the linear response to white noise shows more than one peak. This is a distinctly nonlinear phenomenon, indicitive if the squeezing of the steady state. Branch 2 is again quasi-linear, which stems from its low amplitude.
',4)),i("p",null,[s[36]||(s[36]=a("Following ")),s[37]||(s[37]=i("a",{href:"https://doi.org/10.1103/PhysRevX.10.021066",target:"_blank",rel:"noreferrer"},"Huber et al.",-1)),s[38]||(s[38]=a(", we may also fix ")),i("mjx-container",A,[(e(),t("svg",M,s[32]||(s[32]=[n('',1)]))),s[33]||(s[33]=i("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[i("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[i("mi",null,"ω"),i("mo",null,"="),i("msub",null,[i("mi",null,"ω"),i("mn",null,"0")])])],-1))]),s[39]||(s[39]=a(" and plot the linear response as a function of ")),i("mjx-container",L,[(e(),t("svg",j,s[34]||(s[34]=[i("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[i("g",{"data-mml-node":"math"},[i("g",{"data-mml-node":"mi"},[i("path",{"data-c":"1D439",d:"M48 1Q31 1 31 11Q31 13 34 25Q38 41 42 43T65 46Q92 46 125 49Q139 52 144 61Q146 66 215 342T285 622Q285 629 281 629Q273 632 228 634H197Q191 640 191 642T193 659Q197 676 203 680H742Q749 676 749 669Q749 664 736 557T722 447Q720 440 702 440H690Q683 445 683 453Q683 454 686 477T689 530Q689 560 682 579T663 610T626 626T575 633T503 634H480Q398 633 393 631Q388 629 386 623Q385 622 352 492L320 363H375Q378 363 398 363T426 364T448 367T472 374T489 386Q502 398 511 419T524 457T529 475Q532 480 548 480H560Q567 475 567 470Q567 467 536 339T502 207Q500 200 482 200H470Q463 206 463 212Q463 215 468 234T473 274Q473 303 453 310T364 317H309L277 190Q245 66 245 60Q245 46 334 46H359Q365 40 365 39T363 19Q359 6 353 0H336Q295 2 185 2Q120 2 86 2T48 1Z",style:{"stroke-width":"3"}})])])],-1)]))),s[35]||(s[35]=i("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[i("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[i("mi",null,"F")])],-1))]),s[40]||(s[40]=a(". The response turns out to be single-valued over a large range of driving strengths. Using a log scale for the x-axis:"))]),s[56]||(s[56]=n(`
',2)),i("p",null,[s[45]||(s[45]=a("We see that for low ")),i("mjx-container",V,[(e(),t("svg",q,s[41]||(s[41]=[i("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[i("g",{"data-mml-node":"math"},[i("g",{"data-mml-node":"mi"},[i("path",{"data-c":"1D439",d:"M48 1Q31 1 31 11Q31 13 34 25Q38 41 42 43T65 46Q92 46 125 49Q139 52 144 61Q146 66 215 342T285 622Q285 629 281 629Q273 632 228 634H197Q191 640 191 642T193 659Q197 676 203 680H742Q749 676 749 669Q749 664 736 557T722 447Q720 440 702 440H690Q683 445 683 453Q683 454 686 477T689 530Q689 560 682 579T663 610T626 626T575 633T503 634H480Q398 633 393 631Q388 629 386 623Q385 622 352 492L320 363H375Q378 363 398 363T426 364T448 367T472 374T489 386Q502 398 511 419T524 457T529 475Q532 480 548 480H560Q567 475 567 470Q567 467 536 339T502 207Q500 200 482 200H470Q463 206 463 212Q463 215 468 234T473 274Q473 303 453 310T364 317H309L277 190Q245 66 245 60Q245 46 334 46H359Q365 40 365 39T363 19Q359 6 353 0H336Q295 2 185 2Q120 2 86 2T48 1Z",style:{"stroke-width":"3"}})])])],-1)]))),s[42]||(s[42]=i("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[i("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[i("mi",null,"F")])],-1))]),s[46]||(s[46]=a(", quasi-linear behaviour with a single Lorentzian response occurs, while for larger ")),i("mjx-container",Z,[(e(),t("svg",z,s[43]||(s[43]=[i("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[i("g",{"data-mml-node":"math"},[i("g",{"data-mml-node":"mi"},[i("path",{"data-c":"1D439",d:"M48 1Q31 1 31 11Q31 13 34 25Q38 41 42 43T65 46Q92 46 125 49Q139 52 144 61Q146 66 215 342T285 622Q285 629 281 629Q273 632 228 634H197Q191 640 191 642T193 659Q197 676 203 680H742Q749 676 749 669Q749 664 736 557T722 447Q720 440 702 440H690Q683 445 683 453Q683 454 686 477T689 530Q689 560 682 579T663 610T626 626T575 633T503 634H480Q398 633 393 631Q388 629 386 623Q385 622 352 492L320 363H375Q378 363 398 363T426 364T448 367T472 374T489 386Q502 398 511 419T524 457T529 475Q532 480 548 480H560Q567 475 567 470Q567 467 536 339T502 207Q500 200 482 200H470Q463 206 463 212Q463 215 468 234T473 274Q473 303 453 310T364 317H309L277 190Q245 66 245 60Q245 46 334 46H359Q365 40 365 39T363 19Q359 6 353 0H336Q295 2 185 2Q120 2 86 2T48 1Z",style:{"stroke-width":"3"}})])])],-1)]))),s[44]||(s[44]=i("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[i("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[i("mi",null,"F")])],-1))]),s[47]||(s[47]=a(", two peaks form in the noise response. The two peaks are strongly unequal in magnitude, which is an example of internal squeezing (See supplemental material of ")),s[48]||(s[48]=i("a",{href:"https://doi.org/10.1103/PhysRevX.10.021066",target:"_blank",rel:"noreferrer"},"Huber et al.",-1)),s[49]||(s[49]=a(")."))])])}const W=l(Q,[["render",S]]);export{O as __pageData,W as default};
diff --git a/v0.10.10/assets/tutorials_steady_states.md.DM-rMb_y.js b/v0.10.10/assets/tutorials_steady_states.md.DM-rMb_y.js
new file mode 100644
index 00000000..39393566
--- /dev/null
+++ b/v0.10.10/assets/tutorials_steady_states.md.DM-rMb_y.js
@@ -0,0 +1,52 @@
+import{_ as l,c as T,j as t,a as Q,a4 as e,o as s}from"./chunks/framework.TrWZWXe1.js";const n="/HarmonicBalance.jl/v0.10.10/assets/okkxwnb.B07IzMp6.png",i="/HarmonicBalance.jl/v0.10.10/assets/qemjqtj.CY3KP9Dg.png",o="/HarmonicBalance.jl/v0.10.10/assets/ucpiacu.UTcoxLl5.png",r="/HarmonicBalance.jl/v0.10.10/assets/nmhmsgf.BNXvpC22.png",N1=JSON.parse('{"title":"Finding the staedy states of a Duffing oscillator","description":"","frontmatter":{},"headers":[],"relativePath":"tutorials/steady_states.md","filePath":"tutorials/steady_states.md"}'),d={name:"tutorials/steady_states.md"},m={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},h={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"3.871ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 1711 1000","aria-hidden":"true"},p={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},g={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-4.03ex"},xmlns:"http://www.w3.org/2000/svg",width:"48.629ex",height:"6.03ex",role:"img",focusable:"false",viewBox:"0 -883.9 21494.2 2665.1","aria-hidden":"true"},H={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},u={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},c={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},k={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"28.664ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 12669.3 1000","aria-hidden":"true"},w={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},x={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"3.871ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 1711 1000","aria-hidden":"true"},y={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},f={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.735ex",height:"1.595ex",role:"img",focusable:"false",viewBox:"0 -683 767 705","aria-hidden":"true"},V={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},L={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.74ex",height:"1.595ex",role:"img",focusable:"false",viewBox:"0 -683 769 705","aria-hidden":"true"},M={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},v={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},b={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},Z={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.735ex",height:"1.595ex",role:"img",focusable:"false",viewBox:"0 -683 767 705","aria-hidden":"true"},E={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},D={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.74ex",height:"1.595ex",role:"img",focusable:"false",viewBox:"0 -683 769 705","aria-hidden":"true"},C={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},j={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.186ex"},xmlns:"http://www.w3.org/2000/svg",width:"6.267ex",height:"2.072ex",role:"img",focusable:"false",viewBox:"0 -833.9 2770.1 915.9","aria-hidden":"true"},F={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},B={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},A={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},q={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.212ex"},xmlns:"http://www.w3.org/2000/svg",width:"10.403ex",height:"2.398ex",role:"img",focusable:"false",viewBox:"0 -966.5 4598.1 1060","aria-hidden":"true"},z={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},S={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},O={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},J={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},G={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},N={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.448ex",height:"1.025ex",role:"img",focusable:"false",viewBox:"0 -442 640 453","aria-hidden":"true"},R={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},P={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.594ex"},xmlns:"http://www.w3.org/2000/svg",width:"42.859ex",height:"2.594ex",role:"img",focusable:"false",viewBox:"0 -883.9 18943.7 1146.5","aria-hidden":"true"},X={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},U={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"0.919ex",height:"1ex",role:"img",focusable:"false",viewBox:"0 -431 406 442","aria-hidden":"true"},W={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},I={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"23.227ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 10266.3 1000","aria-hidden":"true"},$={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},K={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"20.29ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 8968.1 1000","aria-hidden":"true"},Y={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},_={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"4.859ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 2147.6 1000","aria-hidden":"true"},t1={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},a1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-2.827ex"},xmlns:"http://www.w3.org/2000/svg",width:"58.986ex",height:"6.785ex",role:"img",focusable:"false",viewBox:"0 -1749.5 26071.8 2999","aria-hidden":"true"},Q1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},T1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"24.358ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 10766.3 1000","aria-hidden":"true"},s1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},e1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},l1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},n1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.538ex",height:"1.554ex",role:"img",focusable:"false",viewBox:"0 -665 1122 687","aria-hidden":"true"},i1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},o1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},r1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},d1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.538ex",height:"1.554ex",role:"img",focusable:"false",viewBox:"0 -665 1122 687","aria-hidden":"true"},m1={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},h1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"57.19ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 25277.8 1000","aria-hidden":"true"},p1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},g1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},H1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},u1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.538ex",height:"1.554ex",role:"img",focusable:"false",viewBox:"0 -665 1122 687","aria-hidden":"true"},c1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},k1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.186ex"},xmlns:"http://www.w3.org/2000/svg",width:"7.398ex",height:"2.09ex",role:"img",focusable:"false",viewBox:"0 -841.7 3270.1 923.7","aria-hidden":"true"},w1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},x1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},y1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},f1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.538ex",height:"1.554ex",role:"img",focusable:"false",viewBox:"0 -665 1122 687","aria-hidden":"true"},V1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},L1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"9.082ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 4014.1 1000","aria-hidden":"true"},M1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},v1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.375ex"},xmlns:"http://www.w3.org/2000/svg",width:"7.95ex",height:"1.879ex",role:"img",focusable:"false",viewBox:"0 -665 3514.1 830.6","aria-hidden":"true"},b1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},Z1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-1.287ex"},xmlns:"http://www.w3.org/2000/svg",width:"10.781ex",height:"4.208ex",role:"img",focusable:"false",viewBox:"0 -1291.1 4765.1 1860","aria-hidden":"true"},E1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},D1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-1.287ex"},xmlns:"http://www.w3.org/2000/svg",width:"10.781ex",height:"4.208ex",role:"img",focusable:"false",viewBox:"0 -1291.1 4765.1 1860","aria-hidden":"true"},C1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},j1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},F1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},B1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.538ex",height:"1.554ex",role:"img",focusable:"false",viewBox:"0 -665 1122 687","aria-hidden":"true"};function A1(q1,a,z1,S1,O1,J1){return s(),T("div",null,[a[162]||(a[162]=t("h1",{id:"Duffing",tabindex:"-1"},[Q("Finding the staedy states of a Duffing oscillator "),t("a",{class:"header-anchor",href:"#Duffing","aria-label":'Permalink to "Finding the staedy states of a Duffing oscillator {#Duffing}"'},"")],-1)),t("p",null,[a[2]||(a[2]=Q("Here we show the workflow of HarmonicBalance.jl on a simple example - the driven Duffing oscillator. The equation of motion for the displacement ")),t("mjx-container",m,[(s(),T("svg",h,a[0]||(a[0]=[e('',1)]))),a[1]||(a[1]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"x"),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")")])],-1))]),a[3]||(a[3]=Q(" reads"))]),t("mjx-container",p,[(s(),T("svg",g,a[4]||(a[4]=[e('',1)]))),a[5]||(a[5]=t("mjx-assistive-mml",{unselectable:"on",display:"block",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",overflow:"hidden",width:"100%"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML",display:"block"},[t("munder",null,[t("mrow",{"data-mjx-texclass":"OP"},[t("munder",null,[t("mrow",null,[t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"¨")])]),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mo",null,"+"),t("mi",null,"γ"),t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"˙")])]),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mo",null,"+"),t("msubsup",null,[t("mi",null,"ω"),t("mn",null,"0"),t("mn",null,"2")]),t("mi",null,"x"),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")")]),t("mo",null,"⏟")])]),t("mrow",{"data-mjx-texclass":"ORD"},[t("mtext",null,"damped harmonic oscillator")])]),t("mo",null,"+"),t("munder",null,[t("mrow",{"data-mjx-texclass":"OP"},[t("munder",null,[t("mrow",null,[t("mi",null,"α"),t("mi",null,"x"),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("msup",null,[t("mo",{stretchy:"false"},")"),t("mn",null,"3")])]),t("mo",null,"⏟")])]),t("mrow",{"data-mjx-texclass":"ORD"},[t("mtext",null,"Duffing coefficient")])]),t("mo",null,"="),t("munder",null,[t("mrow",{"data-mjx-texclass":"OP"},[t("munder",null,[t("mrow",null,[t("mi",null,"F"),t("mi",null,"cos"),t("mo",{"data-mjx-texclass":"NONE"},""),t("mo",{stretchy:"false"},"("),t("mi",null,"ω"),t("mi",null,"t"),t("mo",{stretchy:"false"},")")]),t("mo",null,"⏟")])]),t("mrow",{"data-mjx-texclass":"ORD"},[t("mtext",null,"periodic drive")])])])],-1))]),t("p",null,[a[8]||(a[8]=Q("In general, there is no analytical solution to the differential equation. Fortunately, some harmonics are more important than others. By truncating the infinite-dimensional Fourier space to a set of judiciously chosen harmonics, we may obtain a soluble system. For the Duffing resonator, we can well try to only consider the drive frequency ")),t("mjx-container",H,[(s(),T("svg",u,a[6]||(a[6]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D714",d:"M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z",style:{"stroke-width":"3"}})])])],-1)]))),a[7]||(a[7]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"ω")])],-1))]),a[9]||(a[9]=Q(". To implement this, we use the ")),a[10]||(a[10]=t("em",null,"harmonic ansatz",-1))]),t("mjx-container",c,[(s(),T("svg",k,a[11]||(a[11]=[e('',1)]))),a[12]||(a[12]=t("mjx-assistive-mml",{unselectable:"on",display:"block",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",overflow:"hidden",width:"100%"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML",display:"block"},[t("mi",null,"x"),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mo",null,"="),t("mi",null,"U"),t("mi",null,"cos"),t("mo",{"data-mjx-texclass":"NONE"},""),t("mo",{stretchy:"false"},"("),t("mi",null,"ω"),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mo",null,"+"),t("mi",null,"V"),t("mi",null,"sin"),t("mo",{"data-mjx-texclass":"NONE"},""),t("mo",{stretchy:"false"},"("),t("mi",null,"ω"),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mstyle",{scriptlevel:"0"},[t("mspace",{width:"0.167em"})]),t("mo",null,",")])],-1))]),t("p",null,[a[19]||(a[19]=Q("which constraints the spectrum of ")),t("mjx-container",w,[(s(),T("svg",x,a[13]||(a[13]=[e('',1)]))),a[14]||(a[14]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"x"),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")")])],-1))]),a[20]||(a[20]=Q(" to a single harmonic. Fixing the quadratures ")),t("mjx-container",y,[(s(),T("svg",f,a[15]||(a[15]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D448",d:"M107 637Q73 637 71 641Q70 643 70 649Q70 673 81 682Q83 683 98 683Q139 681 234 681Q268 681 297 681T342 682T362 682Q378 682 378 672Q378 670 376 658Q371 641 366 638H364Q362 638 359 638T352 638T343 637T334 637Q295 636 284 634T266 623Q265 621 238 518T184 302T154 169Q152 155 152 140Q152 86 183 55T269 24Q336 24 403 69T501 205L552 406Q599 598 599 606Q599 633 535 637Q511 637 511 648Q511 650 513 660Q517 676 519 679T529 683Q532 683 561 682T645 680Q696 680 723 681T752 682Q767 682 767 672Q767 650 759 642Q756 637 737 637Q666 633 648 597Q646 592 598 404Q557 235 548 205Q515 105 433 42T263 -22Q171 -22 116 34T60 167V183Q60 201 115 421Q164 622 164 628Q164 635 107 637Z",style:{"stroke-width":"3"}})])])],-1)]))),a[16]||(a[16]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"U")])],-1))]),a[21]||(a[21]=Q(" and ")),t("mjx-container",V,[(s(),T("svg",L,a[17]||(a[17]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D449",d:"M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z",style:{"stroke-width":"3"}})])])],-1)]))),a[18]||(a[18]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"V")])],-1))]),a[22]||(a[22]=Q(" to be constant then reduces the differential equation to two coupled cubic polynomial equations (for more details on this step, see the appendices in the ")),a[23]||(a[23]=t("a",{href:"https://scipost.org/SciPostPhysCodeb.6",target:"_blank",rel:"noreferrer"},"white paper",-1)),a[24]||(a[24]=Q("). Finding the roots of coupled polynomials is in general very hard. We here apply the method of homotopy continuation, as implemented in ")),a[25]||(a[25]=t("a",{href:"https://www.juliahomotopycontinuation.org/",target:"_blank",rel:"noreferrer"},"HomotopyContinuation.jl",-1)),a[26]||(a[26]=Q(" which is guaranteed to find the complete set of roots."))]),a[163]||(a[163]=e(`
First we need to declare the symbolic variables (the excellent Symbolics.jl is used here).
julia
using HarmonicBalance
+@variables α ω ω0 F γ t x(t) # declare constant variables and a function x(t)
Next, we have to input the equations of motion. This will be stored as a DifferentialEquation. The input needs to specify that only x is a mathematical variable, the other symbols are parameters:
The variables u1 and v1 were declared automatically to construct the harmonic ansatz. The slow time variable T describes variation of the quadratures on timescales much slower than ω. For a steady state, all derivatives w.r.t T vanish, leaving only algebraic equations to be solved.
We are ready to start plugging in numbers! Let us find steady states by solving harmonic_eq for numerical parameters. Homotopy continuation is especially suited to solving over a range of parameter values. Here we will solve over a range of driving frequencies ω – these are stored as Pairs{Sym, Vector{Float64}}:
julia
varied = ω => range(0.9, 1.2, 100); # range of parameter values
ω => 0.9:0.0030303030303030303:1.2
The other parameters we be fixed – these are declared as Pairs{Sym, Float64} pairs:
Now everything is ready to crank the handle. get_steady_states solves our harmonic_eq using the varied and fixed parameters:
julia
result = get_steady_states(harmonic_eq, varied, fixed)
A steady state result for 100 parameter points
+
+Solution branches: 3
+ of which real: 3
+ of which stable: 2
+
+Classes: stable, physical, Hopf, binary_labels
`,12)),t("p",null,[a[48]||(a[48]=Q("The algorithm has found 3 solution branches in total (out of the ")),a[49]||(a[49]=t("a",{href:"https://en.wikipedia.org/wiki/B%C3%A9zout%27s_theorem",target:"_blank",rel:"noreferrer"},"hypothetically admissible",-1)),a[50]||(a[50]=Q()),t("mjx-container",C,[(s(),T("svg",j,a[44]||(a[44]=[e('',1)]))),a[45]||(a[45]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msup",null,[t("mn",null,"3"),t("mrow",{"data-mjx-texclass":"ORD"},[t("mn",null,"2")])]),t("mo",null,"="),t("mn",null,"9")])],-1))]),a[51]||(a[51]=Q("). All of these are real – and thefore physically observable – for at least some values of ")),t("mjx-container",F,[(s(),T("svg",B,a[46]||(a[46]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D714",d:"M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z",style:{"stroke-width":"3"}})])])],-1)]))),a[47]||(a[47]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"ω")])],-1))]),a[52]||(a[52]=Q('. Only 2 branches are stable under infinitesimal perturbations. The "Classes" are boolean labels classifying each solution point, which may be used to select results for plotting.'))]),t("p",null,[a[57]||(a[57]=Q("We now want to visualize the results. Here we plot the solution amplitude, ")),t("mjx-container",A,[(s(),T("svg",q,a[53]||(a[53]=[e('',1)]))),a[54]||(a[54]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msqrt",null,[t("msup",null,[t("mi",null,"U"),t("mn",null,"2")]),t("mo",null,"+"),t("msup",null,[t("mi",null,"V"),t("mn",null,"2")])])])],-1))]),a[58]||(a[58]=Q(" against the drive frequency ")),t("mjx-container",z,[(s(),T("svg",S,a[55]||(a[55]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D714",d:"M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z",style:{"stroke-width":"3"}})])])],-1)]))),a[56]||(a[56]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"ω")])],-1))]),a[59]||(a[59]=Q(":"))]),a[166]||(a[166]=e('
julia
plot(result, "sqrt(u1^2 + v1^2)")
This is the expected response curve for the Duffing equation.
`,2)),t("p",null,[a[116]||(a[116]=Q("The variables ")),a[117]||(a[117]=t("code",null,"u1",-1)),a[118]||(a[118]=Q(", ")),a[119]||(a[119]=t("code",null,"v1",-1)),a[120]||(a[120]=Q(" now encode ")),a[121]||(a[121]=t("code",null,"ω",-1)),a[122]||(a[122]=Q(" and ")),a[123]||(a[123]=t("code",null,"u2",-1)),a[124]||(a[124]=Q(", ")),a[125]||(a[125]=t("code",null,"v2",-1)),a[126]||(a[126]=Q(" encode ")),a[127]||(a[127]=t("code",null,"3ω",-1)),a[128]||(a[128]=Q(". We see this system is much harder to solve as we now have 4 harmonic variables, resulting in 4 coupled cubic equations. A maximum of ")),t("mjx-container",c1,[(s(),T("svg",k1,a[114]||(a[114]=[e('',1)]))),a[115]||(a[115]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msup",null,[t("mn",null,"3"),t("mn",null,"4")]),t("mo",null,"="),t("mn",null,"81")])],-1))]),a[129]||(a[129]=Q(" solutions ")),a[130]||(a[130]=t("a",{href:"https://en.wikipedia.org/wiki/B%C3%A9zout%27s_theorem",target:"_blank",rel:"noreferrer"},"may appear",-1)),a[131]||(a[131]=Q("!"))]),a[168]||(a[168]=e(`
julia
result = get_steady_states(harmonic_eq, varied, fixed)
+plot(result, "sqrt(u1^2 + v1^2)")
',2)),t("p",null,[a[136]||(a[136]=Q("For the above parameters (where a perturbative treatment would have been reasonable), the principal response at ")),t("mjx-container",w1,[(s(),T("svg",x1,a[132]||(a[132]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D714",d:"M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z",style:{"stroke-width":"3"}})])])],-1)]))),a[133]||(a[133]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"ω")])],-1))]),a[137]||(a[137]=Q(" looks rather similar, with a much smaller upconverted component appearing at ")),t("mjx-container",y1,[(s(),T("svg",f1,a[134]||(a[134]=[e('',1)]))),a[135]||(a[135]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mn",null,"3"),t("mi",null,"ω")])],-1))]),a[138]||(a[138]=Q(":"))]),a[169]||(a[169]=e(`
',2)),t("p",null,[a[143]||(a[143]=Q("The non-perturbative nature of the ansatz allows us to capture some behaviour which is ")),a[144]||(a[144]=t("em",null,"not",-1)),a[145]||(a[145]=Q(" a mere extension of the usual single-harmonic Duffing response. Suppose we drive a strongly nonlinear resonator at frequency ")),t("mjx-container",V1,[(s(),T("svg",L1,a[139]||(a[139]=[e('',1)]))),a[140]||(a[140]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"ω"),t("mo",null,"≅"),t("msub",null,[t("mi",null,"ω"),t("mn",null,"0")]),t("mrow",{"data-mjx-texclass":"ORD"},[t("mo",null,"/")]),t("mn",null,"3")])],-1))]),a[146]||(a[146]=Q(". Such a drive is far out of resonance, however, the upconverted harmonic ")),t("mjx-container",M1,[(s(),T("svg",v1,a[141]||(a[141]=[e('',1)]))),a[142]||(a[142]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mn",null,"3"),t("mi",null,"ω"),t("mo",null,"="),t("msub",null,[t("mi",null,"ω"),t("mn",null,"0")])])],-1))]),a[147]||(a[147]=Q(" is not and may play an important role! Let us try this out:"))]),a[170]||(a[170]=e(`
A steady state result for 100 parameter points
+
+Solution branches: 9
+ of which real: 3
+ of which stable: 2
+
+Classes: stable, physical, Hopf, binary_labels
`,2)),t("p",null,[a[152]||(a[152]=Q("Although 9 branches were found in total, only 3 remain physical (real-valued). Let us visualise the amplitudes corresponding to the two harmonics, ")),t("mjx-container",b1,[(s(),T("svg",Z1,a[148]||(a[148]=[e('',1)]))),a[149]||(a[149]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msqrt",null,[t("msubsup",null,[t("mi",null,"U"),t("mn",null,"1"),t("mn",null,"2")]),t("mo",null,"+"),t("msubsup",null,[t("mi",null,"V"),t("mn",null,"1"),t("mn",null,"2")])])])],-1))]),a[153]||(a[153]=Q(" and ")),t("mjx-container",E1,[(s(),T("svg",D1,a[150]||(a[150]=[e('',1)]))),a[151]||(a[151]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msqrt",null,[t("msubsup",null,[t("mi",null,"U"),t("mn",null,"2"),t("mn",null,"2")]),t("mo",null,"+"),t("msubsup",null,[t("mi",null,"V"),t("mn",null,"2"),t("mn",null,"2")])])])],-1))]),a[154]||(a[154]=Q(" :"))]),a[171]||(a[171]=e(`
',2)),t("p",null,[a[159]||(a[159]=Q("The contributions of ")),t("mjx-container",C1,[(s(),T("svg",j1,a[155]||(a[155]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D714",d:"M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z",style:{"stroke-width":"3"}})])])],-1)]))),a[156]||(a[156]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"ω")])],-1))]),a[160]||(a[160]=Q(" and ")),t("mjx-container",F1,[(s(),T("svg",B1,a[157]||(a[157]=[e('',1)]))),a[158]||(a[158]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mn",null,"3"),t("mi",null,"ω")])],-1))]),a[161]||(a[161]=Q(" are now comparable and the system shows some fairly complex behaviour! This demonstrates how an exact solution within an extended Fourier subspace goes beyond a perturbative treatment."))])])}const R1=l(d,[["render",A1]]);export{N1 as __pageData,R1 as default};
diff --git a/v0.10.10/assets/tutorials_steady_states.md.DM-rMb_y.lean.js b/v0.10.10/assets/tutorials_steady_states.md.DM-rMb_y.lean.js
new file mode 100644
index 00000000..39393566
--- /dev/null
+++ b/v0.10.10/assets/tutorials_steady_states.md.DM-rMb_y.lean.js
@@ -0,0 +1,52 @@
+import{_ as l,c as T,j as t,a as Q,a4 as e,o as s}from"./chunks/framework.TrWZWXe1.js";const n="/HarmonicBalance.jl/v0.10.10/assets/okkxwnb.B07IzMp6.png",i="/HarmonicBalance.jl/v0.10.10/assets/qemjqtj.CY3KP9Dg.png",o="/HarmonicBalance.jl/v0.10.10/assets/ucpiacu.UTcoxLl5.png",r="/HarmonicBalance.jl/v0.10.10/assets/nmhmsgf.BNXvpC22.png",N1=JSON.parse('{"title":"Finding the staedy states of a Duffing oscillator","description":"","frontmatter":{},"headers":[],"relativePath":"tutorials/steady_states.md","filePath":"tutorials/steady_states.md"}'),d={name:"tutorials/steady_states.md"},m={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},h={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"3.871ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 1711 1000","aria-hidden":"true"},p={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},g={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-4.03ex"},xmlns:"http://www.w3.org/2000/svg",width:"48.629ex",height:"6.03ex",role:"img",focusable:"false",viewBox:"0 -883.9 21494.2 2665.1","aria-hidden":"true"},H={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},u={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},c={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},k={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"28.664ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 12669.3 1000","aria-hidden":"true"},w={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},x={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"3.871ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 1711 1000","aria-hidden":"true"},y={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},f={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.735ex",height:"1.595ex",role:"img",focusable:"false",viewBox:"0 -683 767 705","aria-hidden":"true"},V={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},L={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.74ex",height:"1.595ex",role:"img",focusable:"false",viewBox:"0 -683 769 705","aria-hidden":"true"},M={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},v={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},b={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},Z={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.735ex",height:"1.595ex",role:"img",focusable:"false",viewBox:"0 -683 767 705","aria-hidden":"true"},E={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},D={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.74ex",height:"1.595ex",role:"img",focusable:"false",viewBox:"0 -683 769 705","aria-hidden":"true"},C={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},j={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.186ex"},xmlns:"http://www.w3.org/2000/svg",width:"6.267ex",height:"2.072ex",role:"img",focusable:"false",viewBox:"0 -833.9 2770.1 915.9","aria-hidden":"true"},F={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},B={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},A={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},q={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.212ex"},xmlns:"http://www.w3.org/2000/svg",width:"10.403ex",height:"2.398ex",role:"img",focusable:"false",viewBox:"0 -966.5 4598.1 1060","aria-hidden":"true"},z={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},S={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},O={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},J={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},G={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},N={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.448ex",height:"1.025ex",role:"img",focusable:"false",viewBox:"0 -442 640 453","aria-hidden":"true"},R={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},P={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.594ex"},xmlns:"http://www.w3.org/2000/svg",width:"42.859ex",height:"2.594ex",role:"img",focusable:"false",viewBox:"0 -883.9 18943.7 1146.5","aria-hidden":"true"},X={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},U={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"0.919ex",height:"1ex",role:"img",focusable:"false",viewBox:"0 -431 406 442","aria-hidden":"true"},W={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},I={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"23.227ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 10266.3 1000","aria-hidden":"true"},$={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},K={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"20.29ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 8968.1 1000","aria-hidden":"true"},Y={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},_={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"4.859ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 2147.6 1000","aria-hidden":"true"},t1={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},a1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-2.827ex"},xmlns:"http://www.w3.org/2000/svg",width:"58.986ex",height:"6.785ex",role:"img",focusable:"false",viewBox:"0 -1749.5 26071.8 2999","aria-hidden":"true"},Q1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},T1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"24.358ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 10766.3 1000","aria-hidden":"true"},s1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},e1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},l1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},n1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.538ex",height:"1.554ex",role:"img",focusable:"false",viewBox:"0 -665 1122 687","aria-hidden":"true"},i1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},o1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},r1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},d1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.538ex",height:"1.554ex",role:"img",focusable:"false",viewBox:"0 -665 1122 687","aria-hidden":"true"},m1={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},h1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"57.19ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 25277.8 1000","aria-hidden":"true"},p1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},g1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},H1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},u1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.538ex",height:"1.554ex",role:"img",focusable:"false",viewBox:"0 -665 1122 687","aria-hidden":"true"},c1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},k1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.186ex"},xmlns:"http://www.w3.org/2000/svg",width:"7.398ex",height:"2.09ex",role:"img",focusable:"false",viewBox:"0 -841.7 3270.1 923.7","aria-hidden":"true"},w1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},x1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},y1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},f1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.538ex",height:"1.554ex",role:"img",focusable:"false",viewBox:"0 -665 1122 687","aria-hidden":"true"},V1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},L1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"9.082ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 4014.1 1000","aria-hidden":"true"},M1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},v1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.375ex"},xmlns:"http://www.w3.org/2000/svg",width:"7.95ex",height:"1.879ex",role:"img",focusable:"false",viewBox:"0 -665 3514.1 830.6","aria-hidden":"true"},b1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},Z1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-1.287ex"},xmlns:"http://www.w3.org/2000/svg",width:"10.781ex",height:"4.208ex",role:"img",focusable:"false",viewBox:"0 -1291.1 4765.1 1860","aria-hidden":"true"},E1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},D1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-1.287ex"},xmlns:"http://www.w3.org/2000/svg",width:"10.781ex",height:"4.208ex",role:"img",focusable:"false",viewBox:"0 -1291.1 4765.1 1860","aria-hidden":"true"},C1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},j1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},F1={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},B1={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.05ex"},xmlns:"http://www.w3.org/2000/svg",width:"2.538ex",height:"1.554ex",role:"img",focusable:"false",viewBox:"0 -665 1122 687","aria-hidden":"true"};function A1(q1,a,z1,S1,O1,J1){return s(),T("div",null,[a[162]||(a[162]=t("h1",{id:"Duffing",tabindex:"-1"},[Q("Finding the staedy states of a Duffing oscillator "),t("a",{class:"header-anchor",href:"#Duffing","aria-label":'Permalink to "Finding the staedy states of a Duffing oscillator {#Duffing}"'},"")],-1)),t("p",null,[a[2]||(a[2]=Q("Here we show the workflow of HarmonicBalance.jl on a simple example - the driven Duffing oscillator. The equation of motion for the displacement ")),t("mjx-container",m,[(s(),T("svg",h,a[0]||(a[0]=[e('',1)]))),a[1]||(a[1]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"x"),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")")])],-1))]),a[3]||(a[3]=Q(" reads"))]),t("mjx-container",p,[(s(),T("svg",g,a[4]||(a[4]=[e('',1)]))),a[5]||(a[5]=t("mjx-assistive-mml",{unselectable:"on",display:"block",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",overflow:"hidden",width:"100%"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML",display:"block"},[t("munder",null,[t("mrow",{"data-mjx-texclass":"OP"},[t("munder",null,[t("mrow",null,[t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"¨")])]),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mo",null,"+"),t("mi",null,"γ"),t("mrow",{"data-mjx-texclass":"ORD"},[t("mover",null,[t("mi",null,"x"),t("mo",null,"˙")])]),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mo",null,"+"),t("msubsup",null,[t("mi",null,"ω"),t("mn",null,"0"),t("mn",null,"2")]),t("mi",null,"x"),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")")]),t("mo",null,"⏟")])]),t("mrow",{"data-mjx-texclass":"ORD"},[t("mtext",null,"damped harmonic oscillator")])]),t("mo",null,"+"),t("munder",null,[t("mrow",{"data-mjx-texclass":"OP"},[t("munder",null,[t("mrow",null,[t("mi",null,"α"),t("mi",null,"x"),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("msup",null,[t("mo",{stretchy:"false"},")"),t("mn",null,"3")])]),t("mo",null,"⏟")])]),t("mrow",{"data-mjx-texclass":"ORD"},[t("mtext",null,"Duffing coefficient")])]),t("mo",null,"="),t("munder",null,[t("mrow",{"data-mjx-texclass":"OP"},[t("munder",null,[t("mrow",null,[t("mi",null,"F"),t("mi",null,"cos"),t("mo",{"data-mjx-texclass":"NONE"},""),t("mo",{stretchy:"false"},"("),t("mi",null,"ω"),t("mi",null,"t"),t("mo",{stretchy:"false"},")")]),t("mo",null,"⏟")])]),t("mrow",{"data-mjx-texclass":"ORD"},[t("mtext",null,"periodic drive")])])])],-1))]),t("p",null,[a[8]||(a[8]=Q("In general, there is no analytical solution to the differential equation. Fortunately, some harmonics are more important than others. By truncating the infinite-dimensional Fourier space to a set of judiciously chosen harmonics, we may obtain a soluble system. For the Duffing resonator, we can well try to only consider the drive frequency ")),t("mjx-container",H,[(s(),T("svg",u,a[6]||(a[6]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D714",d:"M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z",style:{"stroke-width":"3"}})])])],-1)]))),a[7]||(a[7]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"ω")])],-1))]),a[9]||(a[9]=Q(". To implement this, we use the ")),a[10]||(a[10]=t("em",null,"harmonic ansatz",-1))]),t("mjx-container",c,[(s(),T("svg",k,a[11]||(a[11]=[e('',1)]))),a[12]||(a[12]=t("mjx-assistive-mml",{unselectable:"on",display:"block",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",overflow:"hidden",width:"100%"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML",display:"block"},[t("mi",null,"x"),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mo",null,"="),t("mi",null,"U"),t("mi",null,"cos"),t("mo",{"data-mjx-texclass":"NONE"},""),t("mo",{stretchy:"false"},"("),t("mi",null,"ω"),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mo",null,"+"),t("mi",null,"V"),t("mi",null,"sin"),t("mo",{"data-mjx-texclass":"NONE"},""),t("mo",{stretchy:"false"},"("),t("mi",null,"ω"),t("mi",null,"t"),t("mo",{stretchy:"false"},")"),t("mstyle",{scriptlevel:"0"},[t("mspace",{width:"0.167em"})]),t("mo",null,",")])],-1))]),t("p",null,[a[19]||(a[19]=Q("which constraints the spectrum of ")),t("mjx-container",w,[(s(),T("svg",x,a[13]||(a[13]=[e('',1)]))),a[14]||(a[14]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"x"),t("mo",{stretchy:"false"},"("),t("mi",null,"t"),t("mo",{stretchy:"false"},")")])],-1))]),a[20]||(a[20]=Q(" to a single harmonic. Fixing the quadratures ")),t("mjx-container",y,[(s(),T("svg",f,a[15]||(a[15]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D448",d:"M107 637Q73 637 71 641Q70 643 70 649Q70 673 81 682Q83 683 98 683Q139 681 234 681Q268 681 297 681T342 682T362 682Q378 682 378 672Q378 670 376 658Q371 641 366 638H364Q362 638 359 638T352 638T343 637T334 637Q295 636 284 634T266 623Q265 621 238 518T184 302T154 169Q152 155 152 140Q152 86 183 55T269 24Q336 24 403 69T501 205L552 406Q599 598 599 606Q599 633 535 637Q511 637 511 648Q511 650 513 660Q517 676 519 679T529 683Q532 683 561 682T645 680Q696 680 723 681T752 682Q767 682 767 672Q767 650 759 642Q756 637 737 637Q666 633 648 597Q646 592 598 404Q557 235 548 205Q515 105 433 42T263 -22Q171 -22 116 34T60 167V183Q60 201 115 421Q164 622 164 628Q164 635 107 637Z",style:{"stroke-width":"3"}})])])],-1)]))),a[16]||(a[16]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"U")])],-1))]),a[21]||(a[21]=Q(" and ")),t("mjx-container",V,[(s(),T("svg",L,a[17]||(a[17]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D449",d:"M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z",style:{"stroke-width":"3"}})])])],-1)]))),a[18]||(a[18]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"V")])],-1))]),a[22]||(a[22]=Q(" to be constant then reduces the differential equation to two coupled cubic polynomial equations (for more details on this step, see the appendices in the ")),a[23]||(a[23]=t("a",{href:"https://scipost.org/SciPostPhysCodeb.6",target:"_blank",rel:"noreferrer"},"white paper",-1)),a[24]||(a[24]=Q("). Finding the roots of coupled polynomials is in general very hard. We here apply the method of homotopy continuation, as implemented in ")),a[25]||(a[25]=t("a",{href:"https://www.juliahomotopycontinuation.org/",target:"_blank",rel:"noreferrer"},"HomotopyContinuation.jl",-1)),a[26]||(a[26]=Q(" which is guaranteed to find the complete set of roots."))]),a[163]||(a[163]=e(`
First we need to declare the symbolic variables (the excellent Symbolics.jl is used here).
julia
using HarmonicBalance
+@variables α ω ω0 F γ t x(t) # declare constant variables and a function x(t)
Next, we have to input the equations of motion. This will be stored as a DifferentialEquation. The input needs to specify that only x is a mathematical variable, the other symbols are parameters:
The variables u1 and v1 were declared automatically to construct the harmonic ansatz. The slow time variable T describes variation of the quadratures on timescales much slower than ω. For a steady state, all derivatives w.r.t T vanish, leaving only algebraic equations to be solved.
We are ready to start plugging in numbers! Let us find steady states by solving harmonic_eq for numerical parameters. Homotopy continuation is especially suited to solving over a range of parameter values. Here we will solve over a range of driving frequencies ω – these are stored as Pairs{Sym, Vector{Float64}}:
julia
varied = ω => range(0.9, 1.2, 100); # range of parameter values
ω => 0.9:0.0030303030303030303:1.2
The other parameters we be fixed – these are declared as Pairs{Sym, Float64} pairs:
Now everything is ready to crank the handle. get_steady_states solves our harmonic_eq using the varied and fixed parameters:
julia
result = get_steady_states(harmonic_eq, varied, fixed)
A steady state result for 100 parameter points
+
+Solution branches: 3
+ of which real: 3
+ of which stable: 2
+
+Classes: stable, physical, Hopf, binary_labels
`,12)),t("p",null,[a[48]||(a[48]=Q("The algorithm has found 3 solution branches in total (out of the ")),a[49]||(a[49]=t("a",{href:"https://en.wikipedia.org/wiki/B%C3%A9zout%27s_theorem",target:"_blank",rel:"noreferrer"},"hypothetically admissible",-1)),a[50]||(a[50]=Q()),t("mjx-container",C,[(s(),T("svg",j,a[44]||(a[44]=[e('',1)]))),a[45]||(a[45]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msup",null,[t("mn",null,"3"),t("mrow",{"data-mjx-texclass":"ORD"},[t("mn",null,"2")])]),t("mo",null,"="),t("mn",null,"9")])],-1))]),a[51]||(a[51]=Q("). All of these are real – and thefore physically observable – for at least some values of ")),t("mjx-container",F,[(s(),T("svg",B,a[46]||(a[46]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D714",d:"M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z",style:{"stroke-width":"3"}})])])],-1)]))),a[47]||(a[47]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"ω")])],-1))]),a[52]||(a[52]=Q('. Only 2 branches are stable under infinitesimal perturbations. The "Classes" are boolean labels classifying each solution point, which may be used to select results for plotting.'))]),t("p",null,[a[57]||(a[57]=Q("We now want to visualize the results. Here we plot the solution amplitude, ")),t("mjx-container",A,[(s(),T("svg",q,a[53]||(a[53]=[e('',1)]))),a[54]||(a[54]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msqrt",null,[t("msup",null,[t("mi",null,"U"),t("mn",null,"2")]),t("mo",null,"+"),t("msup",null,[t("mi",null,"V"),t("mn",null,"2")])])])],-1))]),a[58]||(a[58]=Q(" against the drive frequency ")),t("mjx-container",z,[(s(),T("svg",S,a[55]||(a[55]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D714",d:"M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z",style:{"stroke-width":"3"}})])])],-1)]))),a[56]||(a[56]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"ω")])],-1))]),a[59]||(a[59]=Q(":"))]),a[166]||(a[166]=e('
julia
plot(result, "sqrt(u1^2 + v1^2)")
This is the expected response curve for the Duffing equation.
`,2)),t("p",null,[a[116]||(a[116]=Q("The variables ")),a[117]||(a[117]=t("code",null,"u1",-1)),a[118]||(a[118]=Q(", ")),a[119]||(a[119]=t("code",null,"v1",-1)),a[120]||(a[120]=Q(" now encode ")),a[121]||(a[121]=t("code",null,"ω",-1)),a[122]||(a[122]=Q(" and ")),a[123]||(a[123]=t("code",null,"u2",-1)),a[124]||(a[124]=Q(", ")),a[125]||(a[125]=t("code",null,"v2",-1)),a[126]||(a[126]=Q(" encode ")),a[127]||(a[127]=t("code",null,"3ω",-1)),a[128]||(a[128]=Q(". We see this system is much harder to solve as we now have 4 harmonic variables, resulting in 4 coupled cubic equations. A maximum of ")),t("mjx-container",c1,[(s(),T("svg",k1,a[114]||(a[114]=[e('',1)]))),a[115]||(a[115]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msup",null,[t("mn",null,"3"),t("mn",null,"4")]),t("mo",null,"="),t("mn",null,"81")])],-1))]),a[129]||(a[129]=Q(" solutions ")),a[130]||(a[130]=t("a",{href:"https://en.wikipedia.org/wiki/B%C3%A9zout%27s_theorem",target:"_blank",rel:"noreferrer"},"may appear",-1)),a[131]||(a[131]=Q("!"))]),a[168]||(a[168]=e(`
julia
result = get_steady_states(harmonic_eq, varied, fixed)
+plot(result, "sqrt(u1^2 + v1^2)")
',2)),t("p",null,[a[136]||(a[136]=Q("For the above parameters (where a perturbative treatment would have been reasonable), the principal response at ")),t("mjx-container",w1,[(s(),T("svg",x1,a[132]||(a[132]=[t("g",{stroke:"currentColor",fill:"currentColor","stroke-width":"0",transform:"scale(1,-1)"},[t("g",{"data-mml-node":"math"},[t("g",{"data-mml-node":"mi"},[t("path",{"data-c":"1D714",d:"M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z",style:{"stroke-width":"3"}})])])],-1)]))),a[133]||(a[133]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"ω")])],-1))]),a[137]||(a[137]=Q(" looks rather similar, with a much smaller upconverted component appearing at ")),t("mjx-container",y1,[(s(),T("svg",f1,a[134]||(a[134]=[e('',1)]))),a[135]||(a[135]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mn",null,"3"),t("mi",null,"ω")])],-1))]),a[138]||(a[138]=Q(":"))]),a[169]||(a[169]=e(`
',2)),t("p",null,[a[143]||(a[143]=Q("The non-perturbative nature of the ansatz allows us to capture some behaviour which is ")),a[144]||(a[144]=t("em",null,"not",-1)),a[145]||(a[145]=Q(" a mere extension of the usual single-harmonic Duffing response. Suppose we drive a strongly nonlinear resonator at frequency ")),t("mjx-container",V1,[(s(),T("svg",L1,a[139]||(a[139]=[e('',1)]))),a[140]||(a[140]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mi",null,"ω"),t("mo",null,"≅"),t("msub",null,[t("mi",null,"ω"),t("mn",null,"0")]),t("mrow",{"data-mjx-texclass":"ORD"},[t("mo",null,"/")]),t("mn",null,"3")])],-1))]),a[146]||(a[146]=Q(". Such a drive is far out of resonance, however, the upconverted harmonic ")),t("mjx-container",M1,[(s(),T("svg",v1,a[141]||(a[141]=[e('',1)]))),a[142]||(a[142]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("mn",null,"3"),t("mi",null,"ω"),t("mo",null,"="),t("msub",null,[t("mi",null,"ω"),t("mn",null,"0")])])],-1))]),a[147]||(a[147]=Q(" is not and may play an important role! Let us try this out:"))]),a[170]||(a[170]=e(`
A steady state result for 100 parameter points
+
+Solution branches: 9
+ of which real: 3
+ of which stable: 2
+
+Classes: stable, physical, Hopf, binary_labels
`,2)),t("p",null,[a[152]||(a[152]=Q("Although 9 branches were found in total, only 3 remain physical (real-valued). Let us visualise the amplitudes corresponding to the two harmonics, ")),t("mjx-container",b1,[(s(),T("svg",Z1,a[148]||(a[148]=[e('',1)]))),a[149]||(a[149]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msqrt",null,[t("msubsup",null,[t("mi",null,"U"),t("mn",null,"1"),t("mn",null,"2")]),t("mo",null,"+"),t("msubsup",null,[t("mi",null,"V"),t("mn",null,"1"),t("mn",null,"2")])])])],-1))]),a[153]||(a[153]=Q(" and ")),t("mjx-container",E1,[(s(),T("svg",D1,a[150]||(a[150]=[e('',1)]))),a[151]||(a[151]=t("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[t("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[t("msqrt",null,[t("msubsup",null,[t("mi",null,"U"),t("mn",null,"2"),t("mn",null,"2")]),t("mo",null,"+"),t("msubsup",null,[t("mi",null,"V"),t("mn",null,"2"),t("mn",null,"2")])])])],-1))]),a[154]||(a[154]=Q(" :"))]),a[171]||(a[171]=e(`
Most of HarmonicBalance.jl is focused on finding and analysing the steady states. Such states contain no information about transient behaviour, which is crucial to answer the following.
Given an initial condition, which steady state does the system evolve into?
How does the system behave if its parameters are varied in time?
It is straightforward to evolve the full equation of motion using an ODE solver. However, tracking oscillatory behaviour is computationally expensive.
In the background, we showed that nonlinear driven systems may be reduced to harmonic equations
',5)),s("mjx-container",k,[(n(),e("svg",Q,i[0]||(i[0]=[t('',1)]))),i[1]||(i[1]=s("mjx-assistive-mml",{unselectable:"on",display:"block",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",overflow:"hidden",width:"100%"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML",display:"block"},[s("mfrac",null,[s("mrow",null,[s("mi",null,"d"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",{mathvariant:"bold"},"u")]),s("mo",{stretchy:"false"},"("),s("mi",null,"T"),s("mo",{stretchy:"false"},")")]),s("mrow",null,[s("mi",null,"d"),s("mi",null,"T")])]),s("mo",null,"="),s("mrow",{"data-mjx-texclass":"ORD"},[s("mover",null,[s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",{mathvariant:"bold"},"F")]),s("mo",{stretchy:"false"},"¯")])]),s("mo",{stretchy:"false"},"("),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",{mathvariant:"bold"},"u")]),s("mo",{stretchy:"false"},")"),s("mstyle",{scriptlevel:"0"},[s("mspace",{width:"0.167em"})]),s("mo",null,",")])],-1))]),s("p",null,[i[6]||(i[6]=a("As long as the chosen harmonics constituting ")),s("mjx-container",m,[(n(),e("svg",T,i[2]||(i[2]=[t('',1)]))),i[3]||(i[3]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",{mathvariant:"bold"},"u")]),s("mo",{stretchy:"false"},"("),s("mi",null,"T"),s("mo",{stretchy:"false"},")")])],-1))]),i[7]||(i[7]=a(" capture the system's behaviour, we may numerically evolve the new effective differential equations instead of the full problem. Since the components of ")),s("mjx-container",g,[(n(),e("svg",E,i[4]||(i[4]=[t('',1)]))),i[5]||(i[5]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",{mathvariant:"bold"},"u")]),s("mo",{stretchy:"false"},"("),s("mi",null,"T"),s("mo",{stretchy:"false"},")")])],-1))]),i[8]||(i[8]=a(" only vary very slowly (and are constant in a steady state), this is usually ")),i[9]||(i[9]=s("em",null,"vastly",-1)),i[10]||(i[10]=a(" more efficient than evolving the full problem."))]),i[33]||(i[33]=t(`
Here we primarily demonstrate on the parametrically driven oscillator.
The object harmonic_eq encodes the new effective differential equations.
We now wish to parse this input into OrdinaryDiffEq.jl and use its powerful ODE solvers. The desired object here is OrdinaryDiffEq.ODEProblem, which is then fed into OrdinaryDiffEq.solve.
Experimentally, the primary means of exploring the steady state landscape is an adiabatic sweep one or more of the system parameters. This takes the system along a solution branch. If this branch disappears or becomes unstable, a jump occurs.
The object ParameterSweep specifies a sweep, which is then used as an optional sweep keyword in the ODEProblem constructor.
',3)),s("p",null,[i[30]||(i[30]=a("We see the system first evolves from the initial condition towards the low-amplitude steady state. The amplitude increases as the sweep proceeds, with a jump occurring around ")),s("mjx-container",C,[(n(),e("svg",D,i[28]||(i[28]=[t('',1)]))),i[29]||(i[29]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mi",null,"ω"),s("mo",null,"="),s("mn",null,"1.08")])],-1))]),i[31]||(i[31]=a(" (i.e., time 18000)."))])])}const O=l(d,[["render",L]]);export{q as __pageData,O as default};
diff --git a/v0.10.10/assets/tutorials_time_dependent.md.CBmy_h33.lean.js b/v0.10.10/assets/tutorials_time_dependent.md.CBmy_h33.lean.js
new file mode 100644
index 00000000..b9d0d610
--- /dev/null
+++ b/v0.10.10/assets/tutorials_time_dependent.md.CBmy_h33.lean.js
@@ -0,0 +1,36 @@
+import{_ as l,c as e,a4 as t,j as s,a,o as n}from"./chunks/framework.TrWZWXe1.js";const h="/HarmonicBalance.jl/v0.10.10/assets/nmezmfs.DG1iaM9b.png",p="/HarmonicBalance.jl/v0.10.10/assets/frnvjsq.C1saRSuo.png",r="/HarmonicBalance.jl/v0.10.10/assets/cqedvtw.dPeTlm0F.png",o="/HarmonicBalance.jl/v0.10.10/assets/qbfgfrf.Bl1qALVt.png",q=JSON.parse('{"title":"Time-dependent simulations","description":"","frontmatter":{},"headers":[],"relativePath":"tutorials/time_dependent.md","filePath":"tutorials/time_dependent.md"}'),d={name:"tutorials/time_dependent.md"},k={class:"MathJax",jax:"SVG",display:"true",style:{direction:"ltr",display:"block","text-align":"center",margin:"1em 0",position:"relative"}},Q={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-1.575ex"},xmlns:"http://www.w3.org/2000/svg",width:"15.838ex",height:"4.878ex",role:"img",focusable:"false",viewBox:"0 -1460 7000.6 2156","aria-hidden":"true"},m={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},T={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"4.799ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 2121 1000","aria-hidden":"true"},g={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},E={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"4.799ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 2121 1000","aria-hidden":"true"},c={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},y={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"5.515ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 2437.6 1000","aria-hidden":"true"},u={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},x={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.566ex"},xmlns:"http://www.w3.org/2000/svg",width:"4.799ex",height:"2.262ex",role:"img",focusable:"false",viewBox:"0 -750 2121 1000","aria-hidden":"true"},w={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},v={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.186ex"},xmlns:"http://www.w3.org/2000/svg",width:"7.316ex",height:"1.692ex",role:"img",focusable:"false",viewBox:"0 -666 3233.6 748","aria-hidden":"true"},f={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},F={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.186ex"},xmlns:"http://www.w3.org/2000/svg",width:"7.316ex",height:"1.692ex",role:"img",focusable:"false",viewBox:"0 -666 3233.6 748","aria-hidden":"true"},b={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},H={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.025ex"},xmlns:"http://www.w3.org/2000/svg",width:"1.407ex",height:"1.027ex",role:"img",focusable:"false",viewBox:"0 -443 622 454","aria-hidden":"true"},C={class:"MathJax",jax:"SVG",style:{direction:"ltr",position:"relative"}},D={style:{overflow:"visible","min-height":"1px","min-width":"1px","vertical-align":"-0.186ex"},xmlns:"http://www.w3.org/2000/svg",width:"8.447ex",height:"1.692ex",role:"img",focusable:"false",viewBox:"0 -666 3733.6 748","aria-hidden":"true"};function L(M,i,V,B,A,j){return n(),e("div",null,[i[32]||(i[32]=t('
Most of HarmonicBalance.jl is focused on finding and analysing the steady states. Such states contain no information about transient behaviour, which is crucial to answer the following.
Given an initial condition, which steady state does the system evolve into?
How does the system behave if its parameters are varied in time?
It is straightforward to evolve the full equation of motion using an ODE solver. However, tracking oscillatory behaviour is computationally expensive.
In the background, we showed that nonlinear driven systems may be reduced to harmonic equations
',5)),s("mjx-container",k,[(n(),e("svg",Q,i[0]||(i[0]=[t('',1)]))),i[1]||(i[1]=s("mjx-assistive-mml",{unselectable:"on",display:"block",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",overflow:"hidden",width:"100%"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML",display:"block"},[s("mfrac",null,[s("mrow",null,[s("mi",null,"d"),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",{mathvariant:"bold"},"u")]),s("mo",{stretchy:"false"},"("),s("mi",null,"T"),s("mo",{stretchy:"false"},")")]),s("mrow",null,[s("mi",null,"d"),s("mi",null,"T")])]),s("mo",null,"="),s("mrow",{"data-mjx-texclass":"ORD"},[s("mover",null,[s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",{mathvariant:"bold"},"F")]),s("mo",{stretchy:"false"},"¯")])]),s("mo",{stretchy:"false"},"("),s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",{mathvariant:"bold"},"u")]),s("mo",{stretchy:"false"},")"),s("mstyle",{scriptlevel:"0"},[s("mspace",{width:"0.167em"})]),s("mo",null,",")])],-1))]),s("p",null,[i[6]||(i[6]=a("As long as the chosen harmonics constituting ")),s("mjx-container",m,[(n(),e("svg",T,i[2]||(i[2]=[t('',1)]))),i[3]||(i[3]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",{mathvariant:"bold"},"u")]),s("mo",{stretchy:"false"},"("),s("mi",null,"T"),s("mo",{stretchy:"false"},")")])],-1))]),i[7]||(i[7]=a(" capture the system's behaviour, we may numerically evolve the new effective differential equations instead of the full problem. Since the components of ")),s("mjx-container",g,[(n(),e("svg",E,i[4]||(i[4]=[t('',1)]))),i[5]||(i[5]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mrow",{"data-mjx-texclass":"ORD"},[s("mi",{mathvariant:"bold"},"u")]),s("mo",{stretchy:"false"},"("),s("mi",null,"T"),s("mo",{stretchy:"false"},")")])],-1))]),i[8]||(i[8]=a(" only vary very slowly (and are constant in a steady state), this is usually ")),i[9]||(i[9]=s("em",null,"vastly",-1)),i[10]||(i[10]=a(" more efficient than evolving the full problem."))]),i[33]||(i[33]=t(`
Here we primarily demonstrate on the parametrically driven oscillator.
The object harmonic_eq encodes the new effective differential equations.
We now wish to parse this input into OrdinaryDiffEq.jl and use its powerful ODE solvers. The desired object here is OrdinaryDiffEq.ODEProblem, which is then fed into OrdinaryDiffEq.solve.
Experimentally, the primary means of exploring the steady state landscape is an adiabatic sweep one or more of the system parameters. This takes the system along a solution branch. If this branch disappears or becomes unstable, a jump occurs.
The object ParameterSweep specifies a sweep, which is then used as an optional sweep keyword in the ODEProblem constructor.
',3)),s("p",null,[i[30]||(i[30]=a("We see the system first evolves from the initial condition towards the low-amplitude steady state. The amplitude increases as the sweep proceeds, with a jump occurring around ")),s("mjx-container",C,[(n(),e("svg",D,i[28]||(i[28]=[t('',1)]))),i[29]||(i[29]=s("mjx-assistive-mml",{unselectable:"on",display:"inline",style:{top:"0px",left:"0px",clip:"rect(1px, 1px, 1px, 1px)","-webkit-touch-callout":"none","-webkit-user-select":"none","-khtml-user-select":"none","-moz-user-select":"none","-ms-user-select":"none","user-select":"none",position:"absolute",padding:"1px 0px 0px 0px",border:"0px",display:"block",width:"auto",overflow:"hidden"}},[s("math",{xmlns:"http://www.w3.org/1998/Math/MathML"},[s("mi",null,"ω"),s("mo",null,"="),s("mn",null,"1.08")])],-1))]),i[31]||(i[31]=a(" (i.e., time 18000)."))])])}const O=l(d,[["render",L]]);export{q as __pageData,O as default};
diff --git a/v0.10.10/assets/ucpiacu.UTcoxLl5.png b/v0.10.10/assets/ucpiacu.UTcoxLl5.png
new file mode 100644
index 00000000..74a9001a
Binary files /dev/null and b/v0.10.10/assets/ucpiacu.UTcoxLl5.png differ
diff --git a/v0.10.10/assets/vfypvvi.BWuHbhjm.png b/v0.10.10/assets/vfypvvi.BWuHbhjm.png
new file mode 100644
index 00000000..63627f64
Binary files /dev/null and b/v0.10.10/assets/vfypvvi.BWuHbhjm.png differ
diff --git a/v0.10.10/assets/wbqfhcb.CDefs9HS.png b/v0.10.10/assets/wbqfhcb.CDefs9HS.png
new file mode 100644
index 00000000..aa00ce97
Binary files /dev/null and b/v0.10.10/assets/wbqfhcb.CDefs9HS.png differ
diff --git a/v0.10.10/assets/wstquaq.CF_iK7k1.png b/v0.10.10/assets/wstquaq.CF_iK7k1.png
new file mode 100644
index 00000000..6104875a
Binary files /dev/null and b/v0.10.10/assets/wstquaq.CF_iK7k1.png differ
diff --git a/v0.10.10/assets/xdobcae.mO0PYFPf.png b/v0.10.10/assets/xdobcae.mO0PYFPf.png
new file mode 100644
index 00000000..171b6718
Binary files /dev/null and b/v0.10.10/assets/xdobcae.mO0PYFPf.png differ
diff --git a/v0.10.10/assets/xumgmjw.C91AM-T5.png b/v0.10.10/assets/xumgmjw.C91AM-T5.png
new file mode 100644
index 00000000..fc875af1
Binary files /dev/null and b/v0.10.10/assets/xumgmjw.C91AM-T5.png differ
diff --git a/v0.10.10/assets/zlfivvs.D8_LTNKe.png b/v0.10.10/assets/zlfivvs.D8_LTNKe.png
new file mode 100644
index 00000000..41983b11
Binary files /dev/null and b/v0.10.10/assets/zlfivvs.D8_LTNKe.png differ
diff --git a/v0.10.10/background/harmonic_balance.html b/v0.10.10/background/harmonic_balance.html
new file mode 100644
index 00000000..df2d90e5
--- /dev/null
+++ b/v0.10.10/background/harmonic_balance.html
@@ -0,0 +1,28 @@
+
+
+
+
+
+ The method of harmonic balance | HarmonicBalance.jl
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Frequency conversion in oscillating nonlinear systems
HarmonicBalance.jl focuses on harmonically-driven nonlinear systems, i.e., dynamical systems governed by equations of motion where all explicitly time-dependent terms are harmonic. Let us take a general nonlinear system of second-order ODEs with real variables , and time as the independent variable,
The vector fully describes the state of the system. Physically, encompasses the amplitudes of either point-like or collective oscillators (e.g., mechanical resonators, voltage oscillations in RLC circuits, an oscillating electrical dipole moment, or standing modes of an optical cavity).
As the simplest example, let us first solve the harmonic oscillator in frequency space. The equation of motion is
where is the damping coefficient and the natural frequency. Fourier-transforming both sides of this equation gives
Evidently, is only nonvanishing for . The system thus responds at the driving frequency only - the behaviour can be captured by a single harmonic. This illustrates the general point that linear systems are exactly solvable by transforming to Fourier space, where the equations are diagonal.
The situation becomes more complex if nonlinear terms are present, as these cause frequency conversion. Suppose we add a quadratic nonlinearity to the equations of motion; an attempt to Fourier-transform gives
which couples all harmonics such that . To lowest order, this means the induced motion at the drive frequency generates a higher harmonic, . To higher orders however, the frequency conversion propagates through the spectrum, coupling an infinite number of harmonics. The system is not solvable in Fourier space anymore!
Even though we need an infinity of Fourier components to describe our system exactly, some components are more important than others. The strategy of harmonic balance is to describe the motion of any variable in a truncated Fourier space
Within this space, the system is described by a finite-dimensional vector
Under the assumption that evolves at much slower timescales than the oscillatory terms , we may neglect all of its higher order time derivatives. Notice that once ansatz \eqref{eq:harmansatz} is used in Eq. \eqref{eq:ode}, all terms become oscillatory - each prefactor of and thus generates a separate equation. Collecting these, we obtain a 1st order nonlinear ODEs,
which we call the harmonic equations. The main purpose of HarmonicBalance.jl is to obtain and solve them. We are primarily interested in steady states defined by .
The process of obtaining the harmonic equations is best shown on an example.
Here, we derive the harmonic equations for a single Duffing resonator, governed by the equation
As explained in above, for a periodic driving at frequency and a weak nonlinearity , we expect the response at frequency to dominate, followed by a response at due to frequency conversion.
We first attempt to describe the steady states of Eq. \eqref{eq:duffing} using only one harmonic, . The starting point is the harmonic ansatz for
with the harmonic variables and . The slow time is, for now, equivalent to . Substituting this ansatz into mechanical equations of motion results in
We see that the term has generated terms that oscillate at , describing the process of frequency upconversion. We now Fourier-transform both sides of Eq. \eqref{eq:ansatz1} with respect to to obtain the harmonic equations. This process is equivalent to extracting the respective coefficients of and . Here the distinction between and becomes important: since the evolution of and is assumed to be slow, they are treated as constant for the purpose of the Fourier transformation. Since we are interested in steady states, we drop the higher-order derivatives and rearrange the resulting equation to
Steady states can now be found by setting the l.h.s. to zero, i.e., assuming and constant and neglecting any transient behaviour. This results in a set of 2 nonlinear polynomial equations of order 3, for which the maximum number of solutions set by Bézout's theorem is . Depending on the parameters, the number of real solutions is known to be between 1 and 3.
The steady states describe a response that may be recast as , where and . Frequency conversion from to can be found by setting with and expanding Eq. \eqref{eq:duffing} to first-order in . The resulting equation
describes a simple harmonic oscillator, which is exactly soluble. Correspondingly, a response of at frequency is observed. Since this response is obtained 'on top of' each steady state of the equations of motion, no previously-unknown solutions are generated in the process.
An approach in the spirit of harmonic balance is to use both harmonics and on the same footing, i.e., to insert the ansatz
with being the harmonic variables. As before we substitute the ansatz into Eq. \eqref{eq:duffing}, drop second derivatives with respect to and Fourier-transform both sides. Now, the respective coefficients correspond to , , and . Rearranging, we obtain
In contrast to the single-frequency ansatz, we now have 4 equations of order 3, allowing up to solutions (the number of unique real ones is again generally far smaller). The larger number of solutions is explained by higher harmonics which cannot be captured perturbatively by the single-frequency ansatz. In particular, those where the component is significant. Such solutions appear, e.g., for where the generated harmonic is close to the natural resonant frequency. See the examples for numerical results.
+
+
+
+
\ No newline at end of file
diff --git a/v0.10.10/background/limit_cycles.html b/v0.10.10/background/limit_cycles.html
new file mode 100644
index 00000000..9159ca40
--- /dev/null
+++ b/v0.10.10/background/limit_cycles.html
@@ -0,0 +1,28 @@
+
+
+
+
+
+ Limit cycles | HarmonicBalance.jl
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
We explain how HarmonicBalance.jl uses a new technique to find limit cycles in systems of nonlinear ODEs. For a more in depth overwiew see Chapter 6 in Jan Košata's PhD theses or del_Pino_2024.
The end product of the harmonic balance technique are what we call the harmonic equations, i.e., first-order ODEs for the harmonic variables :
These Odes have no explicit time-dependence - they are autonomous. We have mostly been searching for steady states, which likewise show no time dependence. However, time-dependent solutions to autonomous ODEs can also exist. One mechanism for their creation is a Hopf bifurcation - a critical point where a stable solution transitions into an unstable one. For a stable solution, the associated eigenvalues of the linearisation all satisfy . When a Hopf bifurcation takes place, one complex-conjugate pair of eigenvalues crosses the real axis such that . The state is then, strictly speaking, unstable. However, instead of evolving into another steady state, the system may assume a periodic orbit in phase space, giving a solution of the form
which is an example of a limit cycle. We denote the originating steady state as Hopf-unstable.
We can continue to use harmonic balance as the solution still describes a harmonic response Allwright (1977). If we translate back to the the lab frame [variable ], clearly, each frequency constituting our harmonic ansatz [], we obtain frequencies as well as in the lab frame. Furthermore, as multiple harmonics now co-exist in the system, frequency conversion may take place, spawning further pairs with integer . Therefore, to construct a harmonic ansatz capturing limit cycles, we simply add an integer number of such pairs to our existing set of harmonics,
Having seen how limit cycles are formed, we now proceed to tackle a key problem: how to find their frequency . We again demonstrate by considering a single variable . We may try the simplest ansatz for a system driven at frequency ,
In this formulation, limit cycles may be obtained by solving the resulting harmonic equations with a Runge-Kutta type solver to obtain the time evolution of and . See the limit cycle tutorial for an example.
Including newly-emergent pairs of harmonics is in principle straightforward. Suppose a limit cycle has formed in our system with a frequency , prompting the ansatz
where each of the pairs contributes 4 harmonic variables. The limit cycle frequency is also a variable in this formulation, but does not contribute a harmonic equation, since by construction. We thus arrive at a total of harmonic equations in variables. To obtain steady states, we must thus solve an underdetermined system, which has an infinite number of solutions. Given that we expect the limit cycles to possess gauge freedom, this is a sensible observation. We may still use iterative numerical procedures such as the Newton method to find solutions one by one, but homotopy continuation is not applicable. In this formulation, steady staes states are characterised by zero entries for . The variable is redundant and may take any value - the states therefore also appear infinitely degenerate, which, however, has no physical grounds. Oppositely, solutions may appear for which some of the limit cycle variables are nonzero, but . These violate our assumption of distinct harmonic variables corresponding to distinct frequencies and are therefore discarded.
We now constrain the system to remove the gauge freedom. This is best done by explicitly writing out the free phase. Recall that our solution must be symmetric under a time translation symmetry, that is, taking . Applying this times transforms into
where we defined . Since is free, we can fix it to, for example,
which turns into
We see that fixing the free phase has effectively removed one of the variables, since does not appear any more. Discarding , we can therefore use variables as our harmonic ansatz, i.e.,
to remove the infinite degeneracy. Note that is only defined modulo , but its effect on the harmonic variables is not. Choosing would invert the signs of . As a result, each solution is doubly degenerate. Combined with the sign ambiguity of , we conclude that under the new ansatz, a limit cycle solution appears as a fourfold-degenerate steady state.
The harmonic equations can now be solved using homotopy continuation to obtain all steady states. Compared to the single-harmonic ansatz however, we have significantly enlarged the polynomial system to be solved. As the number of solutions scales exponentially (Bézout bound), we expect vast numbers of solutions even for fairly small systems.
+
+
+
+
\ No newline at end of file
diff --git a/v0.10.10/background/stability_response.html b/v0.10.10/background/stability_response.html
new file mode 100644
index 00000000..318cd88e
--- /dev/null
+++ b/v0.10.10/background/stability_response.html
@@ -0,0 +1,28 @@
+
+
+
+
+
+ Stability and linear response | HarmonicBalance.jl
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
The core of the harmonic balance method is expressing the system's behaviour in terms of Fourier components or harmonics. For an -coordinate system, we choose a set of harmonics to describe each coordinate :
This means the system is now described using a discrete set of variables and . Constructing the vector
Let us assume that we found a steady state . When the system is in this state, it responds to small perturbations either by returning to over some characteristic timescale (stable state) or by evolving away from (unstable state). To analyze the stability of , we linearize the equations of motion around for a small perturbation to obtain
where is the Jacobian matrix of the system evaluated at .
The linearised system is exactly solvable for given an initial condition . The solution can be expanded in terms of the complex eigenvalues and eigenvectors of , namely
The dynamical behaviour near the steady states is thus governed by : if for all , the state is stable. Conversely, if for at least one , the state is unstable - perturbations such as noise or a small applied drive will force the system away from .
The response of a stable steady state to an additional oscillatory force, caused by weak probes or noise, is often of interest. It can be calculated by solving for the perturbation in the presence of an additional drive term.
Suppose we have found an eigenvector of such that . To solve the linearised equations of motion, we insert . Projecting each side onto gives
We see that each eigenvalue results in a linear response that is a Lorentzian centered at . Effectively, the linear response matches that of a harmonic oscillator with resonance frequency and damping .
Knowing the response of the harmonic variables , what is the corresponding behaviour of the "natural" variables ? To find this out, we insert the perturbation back into the harmonic ansatz. Since we require real variables, let us use . Plugging this into
and multiplying out the sines and cosines gives
where and are the components of corresponding to the respective harmonics .
We see that a motion of the harmonic variables at frequency appears as motion of at frequencies .
To make sense of this, we normalize the vector and use normalised components and . We also define the Lorentzian distribution
We see that all components of are proportional to . The first and last two summands are Lorentzians centered at which oscillate at , respectively. From this, we can extract the linear response function in Fourier space,
Keeping in mind that and the normalization , we can rewrite this as
where
The above solution applies to every eigenvalue of the Jacobian. It is now clear that the linear response function contains for each eigenvalue and harmonic :
A Lorentzian centered at with amplitude
A Lorentzian centered at with amplitude
Sidenote: As a real matrix, there is an eigenvalue for each . The maximum number of peaks in the linear response is thus equal to the dimensionality of .
The linear response of the system in the state is thus fully specified by the complex eigenvalues and eigenvectors of . In HarmonicBalance.jl, the module LinearResponse creates a set of plottable Lorentzian objects to represent this.
If we set the cubic nonlinearity to zero, we recover the driven damped harmonic oscillator. Indeed, thefirst order the quadratic nonlinearity has no affect on the system.
The quadratic nonlinearity together with the drive at 2ω gives the effective parametric drive . But the cubic nonlinearity is still needed to get the period doubling bifurcation through .
julia
@variables β α ω ω0 F γ t x(t)
+diff_eq = DifferentialEquation(
+ d(x, t, 2) + ω0^2 * x + β * x^2 + α * x^3 + γ * d(x, t) ~ F * cos(2ω * t), x
+)
+
+add_harmonic!(diff_eq, x, ω)
+harmonic_eq2 = get_krylov_equations(diff_eq; order=2)
One of the most famous effects displaced by nonlinear oscillators is parametric resonance, where the frequency of the linear resonator is modulated in time Phys. Rev. E 94, 022201 (2016). In the following we analyse this system, governed by the equations
where for completeness we also considered an external drive term and a nonlinear damping term
To implement this system in Harmonic Balance, we first import the library
julia
using HarmonicBalance
Subsequently, we type define parameters in the problem and the oscillating amplitude function using the variables macro from Symbolics.jl
We are interested in studying the response of the oscillator to parametric driving and forcing. In particular, we focus on the first parametric resonance of the system, i.e. operating around twice the bare frequency of the undriven oscillator while the frequency of the external drive is also . For this purpose, we consider a harmonic ansatz which contains a single frequency: . In HarmonicBalance, we can do this via add_harmonic command:
julia
add_harmonic!(diff_eq, x, ω);
and replacing this by the time independent (averaged) equations of motion. This can be simply done by writing
The output of these equations are consistent with the result found in the literature. Now we are interested in the linear response spectrum, which we can obtain from the solutions to the averaged equations (rotating frame) as a function of the external drive, after fixing all other parameters in the system. A call to get_steady_states then retrieves all steadystates found allong the sweep employing the homotopy continuation method, which occurs in a complex space (see the nice HomotopyContinuation.jl docs)
A steady state result for 100 parameter points
+
+Solution branches: 5
+ of which real: 5
+ of which stable: 3
+
+Classes: stable, physical, Hopf, binary_labels
In get_steady_states, the default value for the keyword method=:random_warmup initiates the homotopy in a generalised version of the harmonic equations, where parameters become random complex numbers. A parameter homotopy then follows to each of the frequency values in sweep. This offers speed-up, but requires to be tested in each scenario againts the method :total_degree, which initializes the homotopy in a total degree system (maximum number of roots), but needs to track significantly more homotopy paths and there is slower. The threading keyword enables parallel tracking of homotopy paths, and it's set to false simply because we are using a single core computer for now.
After solving the system, we can save the full output of the simulation and the model (e.g. symbolic expressions for the harmonic equations) into a file
During the execution of get_steady_states, different solution branches are classified by their proximity in complex space, with subsequent filtering of real (physically accceptable solutions). In addition, the stability properties of each steady state is assesed from the eigenvalues of the Jacobian matrix. All this information can be succintly represented in a 1D plot via
julia
plot(result; x="ω", y="sqrt(u1^2 + v1^2)")
The user can also introduce custom clases based on parameter conditions via classify_solutions!. Plots can be overlaid and use keywords from Plots, MarkdownAST.LineBreak()
The parametrically driven oscillator boasts a stability diagram called "Arnold's tongues" delineating zones where the oscillator is stable from those where it is exponentially unstable (if the nonlinearity was absence). We can retrieve this diagram by calculating the steady states as a function of external detuning and the parametric drive strength .
To perform a 2D sweep over driving frequency and parametric drive strength , we keep fixed from before but include 2 variables in varied
Now, we count the number of solutions for each point and represent the corresponding phase diagram in parameter space. This is done using plot_phase_diagram. Only counting stable solutions,
julia
plot_phase_diagram(result_2D; class="stable")
In addition to phase diagrams, we can plot functions of the solution. The syntax is identical to 1D plotting. Let us overlay 2 branches into a single plot,
Note that solutions are ordered in parameter space according to their closest neighbors. Plots can again be limited to a given class (e.g stable solutions only) through the keyword argument class.
If we only have a cubic nonlineariy , we observe the normal duffing oscillator response with no response at .
We would like to investigate the three-wave mixing of the driven Duffing oscillator. This means we can excite the system resonantly if the oscillation frequencies and fullfil the conditions . Here, we will especially focus on the degenerate three wave mixing, where such that . This is a very important process in quantum optics, since it allows us to generate photons with a frequency in the visible range from photons with a frequency in the infrared range. This is called frequency doubling and is used in many applications, e.g. in laser pointers.
If we only have a cubic nonlineariy , we observe the normal duffing oscillator response with no response at .
We would like to investigate the three-wave mixing of the driven Duffing oscillator. This means we can excite the system resonantly if the oscillation frequencies and fullfil the conditions . Here, we will especially focus on the degenerate three wave mixing, where such that . This is a very important process in quantum optics, since it allows us to generate photons with a frequency in the visible range from photons with a frequency in the infrared range. This is called frequency doubling and is used in many applications, e.g. in laser pointers.
If you use HarmonicBalance.jl in your project, we kindly ask you to cite this paper, namely:
HarmonicBalance.jl: A Julia suite for nonlinear dynamics using harmonic balance, Jan Košata, Javier del Pino, Toni L. Heugel, Oded Zilberberg, SciPost Phys. Codebases 6 (2022)
The limit cycle finding algorithm is based on the work of this paper:
Limit cycles as stationary states of an extended harmonic balance ansatz J. del Pino, J. Košata, and O. Zilberberg, Phys. Rev. Res. 6, 033180 (2024).
+
+
+
+
\ No newline at end of file
diff --git a/v0.10.10/introduction/index.html b/v0.10.10/introduction/index.html
new file mode 100644
index 00000000..12bab9ae
--- /dev/null
+++ b/v0.10.10/introduction/index.html
@@ -0,0 +1,48 @@
+
+
+
+
+
+ Installation | HarmonicBalance.jl
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
It is easy to install HarmonicBalance.jl as we are registered in the Julia General registry. You can simply run the following command in the Julia REPL:
julia
julia> using Pkg
+julia> Pkg.add("HarmonicBalance")
or
julia
julia> ] # `]` should be pressed
+julia> Pkg.add("HarmonicBalance")
You can check which version you have installled with the command
Let us find the steady states of an external driven Duffing oscillator with nonlinear damping. Its equation of motion is:
julia
using HarmonicBalance
+@variables α ω ω0 F t η x(t) # declare constant variables and a function x(t)
+eom = d(x,t,2) + ω0^2*x + α*x^3 + η*d(x,t)*x^2 ~ F*cos(ω*t)
+diff_eq = DifferentialEquation(eom, x)
+add_harmonic!(diff_eq, x, ω) # specify the ansatz x = u(T) cos(ωt) + v(T) sin(ωt)
+
+# implement ansatz to get harmonic equations
+harmonic_eq = get_harmonic_equations(diff_eq)
+
+fixed = (α => 1.0, ω0 => 1.0, F => 0.01, η => 0.1) # fixed parameters
+varied = ω => range(0.9, 1.2, 100) # range of parameter values
+result = get_steady_states(harmonic_eq, varied, fixed)
A steady state result for 100 parameter points
+
+Solution branches: 3
+ of which real: 3
+ of which stable: 2
+
+Classes: stable, physical, Hopf, binary_labels
The obtained steady states can be plotted as a function of the driving frequency:
julia
plot(result, "sqrt(u1^2 + v1^2)")
If you want learn more on what you can do with HarmonicBalance.jl, check out the tutorials. We also have collected some examples of different physical systems.
+
+
+
+
\ No newline at end of file
diff --git a/v0.10.10/introduction/resources.html b/v0.10.10/introduction/resources.html
new file mode 100644
index 00000000..fea0a6f8
--- /dev/null
+++ b/v0.10.10/introduction/resources.html
@@ -0,0 +1,28 @@
+
+
+
+
+
+ HarmonicBalance.jl
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
The Krylov-Bogoliubov averaging method is an alternative high-frequency expansion technique used to analyze dynamical systems. Unlike the Harmonic Balance method, which is detailed in the background section, the Krylov-Bogoliubov method excels in computing higher orders in , enabling the capture of faster dynamics within a system.
The primary advantage of the Krylov-Bogoliubov method lies in its ability to delve deeper into high-frequency components, allowing a more comprehensive understanding of fast dynamical behaviors. By leveraging this technique, one can obtain higher-order approximations that shed light on intricate system dynamics.
However, it's essential to note a limitation: this method cannot handle multiple harmonics within a single variable, unlike some other high-frequency expansion methods.
To compute the Krylov-Bogoliubov averaging method within your system, utilize the function get_krylov_equations. This function is designed specifically to implement the methodology and derive the equations necessary to analyze the system dynamics using this technique.
Apply the Krylov-Bogoliubov averaging method to a specific order to obtain a set of ODEs (the slow-flow equations) governing the harmonics of diff_eom.
The harmonics evolve in slow_time, the oscillating terms themselves in fast_time. If no input is used, a variable T is defined for slow_time and fast_time is taken as the independent variable of diff_eom.
Krylov-Bogoliubov averaging method can be applied up to order = 2.
Example
julia
julia> @variables t, x(t), ω0, ω, F;
+
+# enter the simple harmonic oscillator
+julia> diff_eom = DifferentialEquation( d(x,t,2) + ω0^2 * x ~ F *cos(ω*t), x);
+
+# expand x in the harmonic ω
+julia> add_harmonic!(diff_eom, x, ω);
+
+# get equations for the harmonics evolving in the slow time T to first order
+julia> harmonic_eom = get_krylov_equations(diff_eom, order = 1)
+
+A set of 2 harmonic equations
+Variables: u1(T), v1(T)
+Parameters: ω, F, ω0
+
+Harmonic ansatz:
+xˍt(t) =
+x(t) = u1(T)*cos(ωt) + v1(T)*sin(ωt)
+
+Harmonic equations:
+
+((1//2)*(ω^2)*v1(T) - (1//2)*(ω0^2)*v1(T)) / ω ~ Differential(T)(u1(T))
+
+((1//2)*(ω0^2)*u1(T) - (1//2)*F - (1//2)*(ω^2)*u1(T)) / ω ~ Differential(T)(v1(T))
The struct DifferentialEquation is the primary input method; it holds an ODE or a coupled system of ODEs composed of terms with harmonic time-dependence The dependent variables are specified during input, any other symbols are identified as parameters. Information on which variable is to be expanded in which harmonic is specified using add_harmonic!.
DifferentialEquation.equations stores a dictionary assigning variables to equations. This information is necessary because the harmonics belonging to a variable are later used to Fourier-transform its corresponding ODE.
Holds differential equation(s) of motion and a set of harmonics to expand each variable. This is the primary input for HarmonicBalance.jl ; after inputting the equations, the harmonics ansatz needs to be specified using add_harmonic!.
Fields
equations::OrderedCollections.OrderedDict{Num, Equation}: Assigns to each variable an equation of motion.
harmonics::OrderedCollections.OrderedDict{Num, OrderedCollections.OrderedSet{Num}}: Assigns to each variable a set of harmonics.
Example
julia
julia> @variables t, x(t), y(t), ω0, ω, F, k;
+
+# equivalent ways to enter the simple harmonic oscillator
+julia> DifferentialEquation(d(x,t,2) + ω0^2 * x - F * cos(ω*t), x);
+julia> DifferentialEquation(d(x,t,2) + ω0^2 * x ~ F * cos(ω*t), x);
+
+# two coupled oscillators, one of them driven
+julia> DifferentialEquation([d(x,t,2) + ω0^2 * x - k*y, d(y,t,2) + ω0^2 * y - k*x] .~ [F * cos(ω*t), 0], [x,y]);
Once a DifferentialEquation is defined and its harmonics specified, one can extract the harmonic equations using get_harmonic_equations, which itself is composed of the subroutines harmonic_ansatz, slow_flow, fourier_transform! and drop_powers.
The harmonic equations use an additional time variable specified as slow_time in get_harmonic_equations. This is essentially a label distinguishing the time dependence of the harmonic variables (expected to be slow) from that of the oscillating terms (expeted to be fast). When the equations are Fourier-transformed to remove oscillating terms, slow_time is treated as a constant. Such an approach is exact when looking for steady states.
Apply the harmonic ansatz, followed by the slow-flow, Fourier transform and dropping higher-order derivatives to obtain a set of ODEs (the harmonic equations) governing the harmonics of diff_eom.
The harmonics evolve in slow_time, the oscillating terms themselves in fast_time. If no input is used, a variable T is defined for slow_time and fast_time is taken as the independent variable of diff_eom.
By default, all products of order > 1 of slow_time-derivatives are dropped, which means the equations are linear in the time-derivatives.
Example
julia
julia> @variables t, x(t), ω0, ω, F;
+
+# enter the simple harmonic oscillator
+julia> diff_eom = DifferentialEquation( d(x,t,2) + ω0^2 * x ~ F *cos(ω*t), x);
+
+# expand x in the harmonic ω
+julia> add_harmonic!(diff_eom, x, ω);
+
+# get equations for the harmonics evolving in the slow time T
+julia> harmonic_eom = get_harmonic_equations(diff_eom)
+
+A set of 2 harmonic equations
+Variables: u1(T), v1(T)
+Parameters: ω0, ω, F
+
+Harmonic ansatz:
+x(t) = u1*cos(ωt) + v1*sin(ωt)
+
+Harmonic equations:
+
+(ω0^2)*u1(T) + (2//1)*ω*Differential(T)(v1(T)) - (ω^2)*u1(T) ~ F
+
+(ω0^2)*v1(T) - (ω^2)*v1(T) - (2//1)*ω*Differential(T)(u1(T)) ~ 0
Expand each variable of diff_eom using the harmonics assigned to it with time as the time variable. For each harmonic of each variable, instance(s) of HarmonicVariable are automatically created and named.
Extract the Fourier components of eom corresponding to the harmonics specified in eom.variables. For each non-zero harmonic of each variable, 2 equations are generated (cos and sin Fourier coefficients). For each zero (constant) harmonic, 1 equation is generated time does not appear in the resulting equations anymore.
Underlying assumption: all time-dependences are harmonic.
The equations governing the harmonics are stored using the two following structs. When going from the original to the harmonic equations, the harmonic ansatz is used. Internally, each pair is stored as a HarmonicVariable. This includes the identification of and , which is needed to later reconstruct .
When the full set of equations of motion is expanded using the harmonic ansatz, the result is stored as a HarmonicEquation. For an initial equation of motion consisting of variables, each expanded in harmonics, the resulting HarmonicEquation holds equations of variables. Each symbol not corresponding to a variable is identified as a parameter.
A HarmonicEquation can be either parsed into a steady-state Problem or solved using a dynamical ODE solver.
This module currently has two goals. One is calculating the first-order Jacobian, used to obtain stability and approximate (but inexpensive) the linear response of steady states. The other is calculating the full response matrix as a function of frequency; this is more accurate but more expensive.
Obtain the symbolic Jacobian matrix of eom (either a HarmonicEquation or a DifferentialEquation). This is the linearised left-hand side of F(u) = du/dT.
Plot the linear response to white noise of the variable nat_var for Result res on branch for input frequencies Ω_range. Slow-time derivatives up to order are kept in the process.
Any kwargs are fed to Plots' gr().
Solutions not belonging to the physical class are ignored.
The simplest way to extract the linear response of a steady state is to evaluate the Jacobian of the harmonic equations. Each of its eigenvalues describes a Lorentzian peak in the response; gives its center and its width. Transforming the harmonic variables into the non-rotating frame (that is, inverting the harmonic ansatz) then gives the response as it would be observed in an experiment.
The advantage of this method is that for a given parameter set, only one matrix diagonalization is needed to fully describe the response spectrum. However, the method is inaccurate for response frequencies far from the frequencies used in the harmonic ansatz (it relies on the response oscillating slowly in the rotating frame).
Behind the scenes, the spectra are stored using the dedicated structs Lorentzian and JacobianSpectrum.
Setting order > 1 increases the accuracy of the response spectra. However, unlike for the Jacobian, here we must perform a matrix inversion for each response frequency.
matrix::Matrix{Function}: The response matrix (compiled).
symbols::Vector{Num}: Any symbolic variables in matrix to be substituted at evaluation.
variables::Vector{HarmonicVariable}: The frequencies of the harmonic variables underlying matrix. These are needed to transform the harmonic variables to the non-rotating frame.
Obtain the symbolic linear response matrix of a diff_eq corresponding to a perturbation frequency freq. This routine cannot accept a HarmonicEquation since there, some time-derivatives are already dropped. order denotes the highest differential order to be considered.
The key method for visualization is transform_solutions, which parses a string into a symbolic expression and evaluates it for every steady state solution.
Takes a Result object and a string f representing a Symbolics.jl expression. Returns an array with the values of f evaluated for the respective solutions. Additional substitution rules can be specified in rules in the format ("a" => val) or (a => val)
The function plot is multiple-dispatched to plot 1D and 2D datasets. In 1D, the solutions are colour-coded according to the branches obtained by sort_solutions.
Class selection done by passing String or Vector{String} as kwarg:
class : only plot solutions in this class(es) ("all" --> plot everything)
+not_class : do not plot solutions in this class(es)
Other kwargs are passed onto Plots.gr().
See also plot!
The x,y,z arguments are Strings compatible with Symbolics.jl, e.g., y=2*sqrt(u1^2+v1^2) plots the amplitude of the first quadratures multiplied by 2.
1D plots
plot(res::Result; x::String, y::String, class="default", not_class=[], kwargs...)
+plot(res::Result, y::String; kwargs...) # take x automatically from Result
Default behaviour is to plot stable solutions as full lines, unstable as dashed.
If a sweep in two parameters were done, i.e., dim(res)==2, a one dimensional cut can be plotted by using the keyword cut were it takes a Pair{Num, Float64} type entry. For example, plot(res, y="sqrt(u1^2+v1^2), cut=(λ => 0.2)) plots a cut at λ = 0.2.
In many problems, rather than in any property of the solutions themselves, we are interested in the phase diagrams, encoding the number of (stable) solutions in different regions of the parameter space. plot_phase_diagram handles this for 1D and 2D datasets.
All of the types native to HarmonicBalance.jl can be saved into a .jld2 file using save and loaded using load. Most of the saving/loading is performed using the package JLD2.jl, with the addition of reinstating the symbolic variables in the HarmonicBalance namespace (needed to parse expressions used in the plotting functions) and recompiling stored functions (needed to evaluate Jacobians). As a consequence, composite objects such as Result can be saved and loaded with no loss of information.
The function export_csv saves a .csv file which can be plot elsewhere.
Saves object into .jld2 file filename (the suffix is added automatically if not entered). The resulting file contains a dictionary with a single entry.
Loads an object from filename. For objects containing symbolic expressions such as HarmonicEquation, the symbolic variables are reinstated in the HarmonicBalance namespace.
Once a differential equation of motion has been defined in DifferentialEquation and converted to a HarmonicEquation, we may use the homotopy continuation method (as implemented in HomotopyContinuation.jl) to find steady states. This means that, having called get_harmonic_equations, we need to set all time-derivatives to zero and parse the resulting algebraic equations into a Problem.
Problem holds the steady-state equations, and (optionally) the symbolic Jacobian which is needed for stability / linear response calculations.
Once defined, a Problem can be solved for a set of input parameters using get_steady_states to obtain Result.
Holds a set of algebraic equations describing the steady state of a system.
Fields
variables::Vector{Num}: The harmonic variables to be solved for.
parameters::Vector{Num}: All symbols which are not the harmonic variables.
system::HomotopyContinuation.ModelKit.System: The input object for HomotopyContinuation.jl solver methods.
jacobian::Any: The Jacobian matrix (possibly symbolic). If false, the Jacobian is ignored (may be calculated implicitly after solving).
eom::HarmonicEquation: The HarmonicEquation object used to generate this Problem.
Constructors
julia
Problem(eom::HarmonicEquation; Jacobian=true) # find and store the symbolic Jacobian
+Problem(eom::HarmonicEquation; Jacobian="implicit") # ignore the Jacobian for now, compute implicitly later
+Problem(eom::HarmonicEquation; Jacobian=J) # use J as the Jacobian (a function that takes a Dict)
+Problem(eom::HarmonicEquation; Jacobian=false) # ignore the Jacobian
Solves prob over the ranges specified by swept_parameters, keeping fixed_parameters constant. swept_parameters accepts pairs mapping symbolic variables to arrays or LinRange. fixed_parameters accepts pairs mapping symbolic variables to numbers.
Keyword arguments
method: If :warmup (default), a problem similar to prob but with random complex parameters is first solved to find all non-singular paths. The subsequent tracking to find results for all swept_parameters is then much faster than the initial solving. If method=:total_degree, each parameter point is solved separately by tracking the maximum number of paths (employs a total degree homotopy).
This takes far longer but can be more reliable.
threading: If true, multithreaded support is activated. The number of available threads is set by the environment variable JULIA_NUM_THREADS.
sorting: the method used by sort_solutions to get continuous solutions branches. The current options are "hilbert" (1D sorting along a Hilbert curve), "nearest" (nearest-neighbor sorting) and "none".
show_progress: Indicate whether a progress bar should be displayed.
Example: solving a simple harmonic oscillator to obtain the response as a function of
julia
# having obtained a Problem object, let's find steady states
+julia> range = ParameterRange(ω => LinRange(0.8,1.2,100) ) # 100 parameter sets to solve
+julia> fixed = ParameterList(m => 1, γ => 0.01, F => 0.5, ω_0 => 1)
+julia> get_steady_states(problem, range, fixed)
+
+A steady state result for 100 parameter points
+
+ Solution branches: 1
+ of which real: 1
+ of which stable: 1
+
+ Classes: stable, physical, Hopf, binary_labels
It is also possible to create multi-dimensional solutions plots.
julia
# The swept parameters take precedence over fixed -> use the same fixed
+julia> range = ParameterRange(ω => LinRange(0.8,1.2,100), F => LinRange(0.1,1.0,10) ) # 100x10 parameter sets
+
+# The swept parameters take precedence over fixed -> the F in fixed is now ignored
+julia> get_steady_states(problem, range, fixed)
+
+A steady state result for 1000 parameter points
+
+ Solution branches: 1
+ of which real: 1
+ of which stable: 1
+
+ Classes: stable, physical, Hopf, binary_labels
solutions::Array{Vector{Vector{ComplexF64}}}: The variable values of steady-state solutions.
swept_parameters::OrderedCollections.OrderedDict{Num, Vector{Union{Float64, ComplexF64}}}: Values of all parameters for all solutions.
fixed_parameters::OrderedCollections.OrderedDict{Num, Float64}: The parameters fixed throughout the solutions.
problem::Problem: The Problem used to generate this.
classes::Dict{String, Array}: Maps strings such as "stable", "physical" etc to arrays of values, classifying the solutions (see method classify_solutions!).
jacobian::Function: The Jacobian with fixed_parameters already substituted. Accepts a dictionary specifying the solution. If problem.jacobian is a symbolic matrix, this holds a compiled function. If problem.jacobian was false, this holds a function that rearranges the equations to find J only after numerical values are inserted (preferable in cases where the symbolic J would be very large).
seed::Union{Nothing, UInt32}: Seed used for the solver
The solutions in Result are accompanied by similarly-sized boolean arrays stored in the dictionary Result.classes. The classes can be used by the plotting functions to show/hide/label certain solutions.
By default, classes "physical", "stable" and "binary_labels" are created. User-defined classification is possible with classify_solutions!.
Solving a steady-state problem over a range of parameters returns a solution set for each parameter. For a continuous change of parameters, each solution in a set usually also changes continuously; it is said to form a ''solution branch''. For an example, see the three colour-coded branches for the Duffing oscillator in Example 1.
For stable states, the branches describe a system's behaviour under adiabatic parameter changes.
Therefore, after solving for a parameter range, we want to order each solution set such that the solutions' order reflects the branches.
The function sort_solutions goes over the the raw output of get_steady_states and sorts each entry such that neighboring solution sets minimize Euclidean distance.
Currently, sort_solutions is compatible with 1D and 2D arrays of solution sets.
Sorts solutions into branches according to the method sorting.
solutions is an n-dimensional array of Vector{Vector}. Each element describes a set of solutions for a given parameter set. The output is a similar array, with each solution set rearranged such that neighboring solution sets have the smallest Euclidean distance.
Keyword arguments
sorting: the method used by sort_solutions to get continuous solutions branches. The current options are "hilbert" (1D sorting along a Hilbert curve), "nearest" (nearest-neighbor sorting) and "none".
show_progress: Indicate whether a progress bar should be displayed.
Generally, solving the ODE of oscillatory systems in time requires numerically tracking the oscillations. This is a computationally expensive process; however, using the harmonic ansatz removes the oscillatory time-dependence. Simulating instead the harmonic variables of a HarmonicEquation is vastly more efficient - a steady state of the system appears as a fixed point in multidimensional space rather than an oscillatory function.
The Extention TimeEvolution is used to interface HarmonicEquation with the solvers contained in OrdinaryDiffEq.jl. Time-dependent parameter sweeps are defined using the object ParameterSweep. To use the TimeEvolution extension, one must first load the OrdinaryDiffEq.jl package.
Creates an ODEProblem object used by OrdinaryDiffEqTsit5.jl from the equations in eom to simulate time-evolution within timespan. fixed_parameters must be a dictionary mapping parameters+variables to numbers (possible to use a solution index, e.g. solutions[x][y] for branch y of solution x). If x0 is specified, it is used as an initial condition; otherwise the values from fixed_parameters are used.
Represents a sweep of one or more parameters of a HarmonicEquation. During a sweep, the selected parameters vary linearly over some timespan and are constant elsewhere.
Sweeps of different variables can be combined using +.
Fields
functions::Dict{Num, Function}: Maps each swept parameter to a function.
Examples
julia
# create a sweep of parameter a from 0 to 1 over time 0 -> 100
+julia> @variables a,b;
+julia> sweep = ParameterSweep(a => [0., 1.], (0, 100));
+julia> sweep[a](50)
+0.5
+julia> sweep[a](200)
+1.0
+
+# do the same, varying two parameters simultaneously
+julia> sweep = ParameterSweep([a => [0.,1.], b => [0., 1.]], (0,100))
Returns true if the solution soln of the Result res is stable. Stable solutions are real and have all Jacobian eigenvalues Re[λ] <= 0. im_tol : an absolute threshold to distinguish real/complex numbers. rel_tol: Re(λ) considered <=0 if real.(λ) < rel_tol*abs(λmax)
Given that you obtained some steady states for a parameter sweep of a specific model it can be useful to classify these solution. Let us consider a simple pametric oscillator
A steady state result for 10000 parameter points
+
+Solution branches: 5
+ of which real: 5
+ of which stable: 5
+
+Classes: stable, physical, Hopf, binary_labels
By default the steady states of the system are classified by four different catogaries:
physical: Solutions that are physical, i.e., all variables are purely real.
stable: Solutions that are stable, i.e., all eigenvalues of the Jacobian have negative real parts.
Hopf: Solutions that are physical and have exactly two Jacobian eigenvalues with positive real parts, which are complex conjugates of each other. The class can help to identify regions where a limit cycle is present due to a Hopf bifurcation. See also the tutorial on limit cycles.
binary_labels: each region in the parameter sweep receives an identifier based on its permutation of stable branches. This allows to distinguish between different phases, which may have the same number of stable solutions.
We can plot the number of stable solutions, giving the phase diagram
julia
plot_phase_diagram(result_2D, class="stable")
If we plot the a cut at , we see that in the blue region only one stable solution exists with zero amplitude:
This solution becomes stable again outside the green lobe. Also called Mathieu lobe. Indeed, we can classify the zero amplitude solution by adding an extra catagory as a class:
A steady state result for 10000 parameter points
+
+Solution branches: 5
+ of which real: 5
+ of which stable: 5
+
+Classes: zero, stable, physical, Hopf, binary_labels
In contrast to the previous tutorials, limit cycle problems feature harmonic(s) whose numerical value is not imposed externally. We shall construct our HarmonicEquation as usual, but identify this harmonic as an extra variable, rather than a fixed parameter.
Here we solve the equation of motion of the van der Pol oscillator. This is a single-variable second-order ODE with continuous time-translation symmetry (i.e., no 'clock' imposing a frequency and/or phase), which displays periodic solutions known as relaxation oscillations. For more detail, refer also to arXiv:2308.06092.
So far, appears as any other harmonic. However, it is not fixed by any external drive or 'clock', instead, it emerges out of a Hopf instability in the system. We can verify that fixing ω_lc and calling get_steady_states.
Taking instead as a variable to be solved for results in a phase freedom, implying an infinite number of solutions. To perform the gauge-fixing procedure, we call get_limit_cycles, marking the limit cycle harmonic as a keyword argument,
julia
result = get_limit_cycles(harmonic_eq, μ => 1:0.1:5, (), ω_lc)
A steady state result for 41 parameter points
+
+Solution branches: 100
+ of which real: 4
+ of which stable: 4
+
+Classes: unique_cycle, stable, physical, Hopf, binary_labels
So far, we have largely focused on finding and analysing steady states, i.e., fixed points of the harmonic equations, which satisfy
Fixed points are however merely a subset of possible solutions of Eq. \eqref{eq:harmeqfull} – strictly speaking, solutions where remains time-dependent are allowed. These are quite unusual, since is by construction time-independent and Eq. \eqref{eq:harmeqfull} thus possesses continuous time-translation symmetry. The appearance of explicitly time-dependent solutions then consitutes spontaneous time-translation symmetry breaking.
Such solutions, known as limit cycles, typically appear as closed periodic trajectories of the harmonic variables . The simplest way to numerically characterise them is a time-dependent simulation, using a steady-state diagram as a guide.
Here we reconstruct the results of Zambon et al., Phys Rev. A 102, 023526 (2020), where limit cycles are shown to appear in a system of two coupled nonlinear oscillators. In this problem, two oscillators and , have (the same) damping and Kerr nonlinearity and are linearly coupled,
julia
using HarmonicBalance
+@variables γ F α ω0 F0 η ω J t x(t) y(t);
+eqs = [d(x,t,2) + γ*d(x,t) + ω0^2*x + α*x^3+ 2*J*ω0*(x-y) - F0*cos(ω*t),
+ d(y,t,2) + γ * d(y,t) + ω0^2 * y + α*y^3 + 2*J*ω0*(y-x) - η*F0*cos(ω*t)]
+diff_eq = DifferentialEquation(eqs, [x,y])
The analysis of Zambon et al. uses a frame rotating at the pump frequency to describe both oscillators. For us, this means we expand both modes using to obtain the harmonic equations.
julia
add_harmonic!(diff_eq, x, ω)
+add_harmonic!(diff_eq, y, ω)
+
+harmonic_eq = get_harmonic_equations(diff_eq)
fixed = (
+ ω0 => 1.4504859, # natural frequency of separate modes (in paper's notation, ħω0 - J)
+ γ => 27.4e-6, # damping
+ J => 154.1e-6, # coupling term
+ α => 3.867e-7, # Kerr nonlinearity
+ ω => 1.4507941, # pump frequency, resonant with antisymmetric mode (in paper, ħω0 + J)
+ η => -0.08, # pumping leaking to site 2 (F2 = ηF1)
+ F0 => 0.002 # pump amplitude (overriden in sweeps)
+)
+varied = F0 => range(0.002, 0.03, 50)
+
+result = get_steady_states(harmonic_eq, varied, fixed)
A steady state result for 50 parameter points
+
+Solution branches: 9
+ of which real: 3
+ of which stable: 2
+
+Classes: stable, physical, Hopf, binary_labels
According to Zambon et al., a limit cycle solution exists around , which can be accessed by a jump from branch 1 in an upwards sweep of . Since a limit cycle is not a steady state of our harmonic equations, it does not appear in the diagram. We do however see that branch 1 ceases to be stable around , meaning a jump should occur.
Let us try and simulate the limit cycle. We could in principle run a time-dependent simulation with a fixed value of , but this would require a suitable initial condition. Instead, we will sweep upwards from a low starting value. To observe the dynamics just after the jump has occurred, we follow the sweep by a time interval where the system evolves under fixed parameters.
julia
using OrdinaryDiffEqTsit5
+initial_state = result[1][1]
+
+T = 2e6
+sweep = ParameterSweep(F0 => (0.002, 0.011), (0,T))
+
+# start from initial_state, use sweep, total time is 2*T
+time_problem = ODEProblem(harmonic_eq, initial_state, sweep=sweep, timespan=(0,2*T))
+time_evo = solve(time_problem, Tsit5(), saveat=100);
Inspecting the amplitude as a function of time,
julia
plot(time_evo, "sqrt(u1^2 + v1^2)", harmonic_eq)
we see that initially the sweep is adiabatic as it proceeds along the steady-state branch 1. At around , an instability occurs and starts to rapidly oscillate. At that point, the sweep is stopped. Under free time evolution, the system then settles into a limit-cycle solution where the coordinates move along closed trajectories.
By plotting the and variables against each other, we observe the limit cycle shapes in phase space,
Here we calculate the white noise response of a simple nonlinear system. A set of reference results may be found in Huber et al. in Phys. Rev. X 10, 021066 (2020). We start by defining the Duffing oscillator
julia
using HarmonicBalance, Plots
+using Plots.Measures: mm
+@variables α, ω, ω0, F, γ, t, x(t); # declare constant variables and a function x(t)
+
+# define ODE
+diff_eq = DifferentialEquation(d(x,t,2) + ω0*x + α*x^3 + γ*d(x,t) ~ F*cos(ω*t), x)
+
+# specify the ansatz x = u(T) cos(ω*t) + v(T) sin(ω*t)
+add_harmonic!(diff_eq, x, ω)
+
+# implement ansatz to get harmonic equations
+harmonic_eq = get_harmonic_equations(diff_eq)
When driven weakly, the Duffing resonator behaves quasi-linearly, i.e, its response to noise is independent of the applied drive. We see that for weak driving, , the amplitude is a Lorentzian.
To find the fluctuation on the top of the steady state one often employs a Bogoliubov-de Gennes analyses. Here, we compute the eigenvalues of the Jacobian matrix at the steady state. The imaginary part of the eigenvalues gives characteristic frequencies of the "quasi-particle excitations". The real part gives the lifetime of these excitations.
We find a single pair of complex conjugate eigenvalues linearly changing with the driving frequency. Both real parts are negative, indicating stability.
The response has a peak at , irrespective of the driving frequency . Indeed, the eigenvalues shown before where plotted in the rotating frame at the frequency of the drive . Hence, the imaginary part of eigenvalues shows the frequency (energy) needed to excite the system at it natural frequency (The frequency its want to be excited at.)
Note the slight "bending" of the noise peak with - this is given by the failure of the first-order calculation to capture response far-detuned from the drive frequency.
Again every branch gives a single pair of complex conjugate eigenvalues. However, for branch 1, the characteristic frequencies due not change linearly with the driving frequency around . This is a sign of steady state becoming nonlinear at large amplitudes.
In branch 1 the linear response to white noise shows more than one peak. This is a distinctly nonlinear phenomenon, indicitive if the squeezing of the steady state. Branch 2 is again quasi-linear, which stems from its low amplitude.
Following Huber et al., we may also fix and plot the linear response as a function of . The response turns out to be single-valued over a large range of driving strengths. Using a log scale for the x-axis:
We see that for low , quasi-linear behaviour with a single Lorentzian response occurs, while for larger , two peaks form in the noise response. The two peaks are strongly unequal in magnitude, which is an example of internal squeezing (See supplemental material of Huber et al.).
+
+
+
+
\ No newline at end of file
diff --git a/v0.10.10/tutorials/steady_states.html b/v0.10.10/tutorials/steady_states.html
new file mode 100644
index 00000000..c408821b
--- /dev/null
+++ b/v0.10.10/tutorials/steady_states.html
@@ -0,0 +1,79 @@
+
+
+
+
+
+ Finding the staedy states of a Duffing oscillator | HarmonicBalance.jl
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Finding the staedy states of a Duffing oscillator
Here we show the workflow of HarmonicBalance.jl on a simple example - the driven Duffing oscillator. The equation of motion for the displacement reads
In general, there is no analytical solution to the differential equation. Fortunately, some harmonics are more important than others. By truncating the infinite-dimensional Fourier space to a set of judiciously chosen harmonics, we may obtain a soluble system. For the Duffing resonator, we can well try to only consider the drive frequency . To implement this, we use the harmonic ansatz
which constraints the spectrum of to a single harmonic. Fixing the quadratures and to be constant then reduces the differential equation to two coupled cubic polynomial equations (for more details on this step, see the appendices in the white paper). Finding the roots of coupled polynomials is in general very hard. We here apply the method of homotopy continuation, as implemented in HomotopyContinuation.jl which is guaranteed to find the complete set of roots.
First we need to declare the symbolic variables (the excellent Symbolics.jl is used here).
julia
using HarmonicBalance
+@variables α ω ω0 F γ t x(t) # declare constant variables and a function x(t)
Next, we have to input the equations of motion. This will be stored as a DifferentialEquation. The input needs to specify that only x is a mathematical variable, the other symbols are parameters:
The harmonic ansatz needs to be specified now – we expand x in a single frequency .
julia
add_harmonic!(diff_eq, x, ω) # specify the ansatz x = u(T) cos(ωt) + v(T) sin(ωt)
The object diff_eq now contains all the necessary information to convert the differential equation to the algebraic harmonic equations (coupled polynomials in and ).
The variables u1 and v1 were declared automatically to construct the harmonic ansatz. The slow time variable T describes variation of the quadratures on timescales much slower than ω. For a steady state, all derivatives w.r.t T vanish, leaving only algebraic equations to be solved.
We are ready to start plugging in numbers! Let us find steady states by solving harmonic_eq for numerical parameters. Homotopy continuation is especially suited to solving over a range of parameter values. Here we will solve over a range of driving frequencies ω – these are stored as Pairs{Sym, Vector{Float64}}:
julia
varied = ω => range(0.9, 1.2, 100); # range of parameter values
ω => 0.9:0.0030303030303030303:1.2
The other parameters we be fixed – these are declared as Pairs{Sym, Float64} pairs:
Now everything is ready to crank the handle. get_steady_states solves our harmonic_eq using the varied and fixed parameters:
julia
result = get_steady_states(harmonic_eq, varied, fixed)
A steady state result for 100 parameter points
+
+Solution branches: 3
+ of which real: 3
+ of which stable: 2
+
+Classes: stable, physical, Hopf, binary_labels
The algorithm has found 3 solution branches in total (out of the hypothetically admissible). All of these are real – and thefore physically observable – for at least some values of . Only 2 branches are stable under infinitesimal perturbations. The "Classes" are boolean labels classifying each solution point, which may be used to select results for plotting.
We now want to visualize the results. Here we plot the solution amplitude, against the drive frequency :
julia
plot(result, "sqrt(u1^2 + v1^2)")
This is the expected response curve for the Duffing equation.
In the above section, we truncated the Fourier space to a single harmonic – the oscillator was assumed to only oscillate at the drive frequency. However, the Duffing oscillator can exhibit a rich spectrum of harmonics. We can obtain some intuition by treating perturbatively in the equation of motion, i.e., by solving
for small . To zeroth order, the response of the system is . Expanding , we find that the perturbation satisfies to first order
which gives a response of the form . Clearly, the oscillator now responds not only at frequency , but also at ! This effect is known as high harmonic generation or more generally frequency conversion. By continuing the procedure to higher orders, we eventually obtain an infinity of harmonics present in the response. In general, there is no analytical solution to such problems.
We argued that frequency conversion takes place, to first order from to . We can reflect this process by using a extended harmonic ansatz:
Note that this is not a perturbative treatment! The harmonics and are on the same footing here. This is implemented as
The variables u1, v1 now encode ω and u2, v2 encode 3ω. We see this system is much harder to solve as we now have 4 harmonic variables, resulting in 4 coupled cubic equations. A maximum of solutions may appear!
julia
result = get_steady_states(harmonic_eq, varied, fixed)
+plot(result, "sqrt(u1^2 + v1^2)")
For the above parameters (where a perturbative treatment would have been reasonable), the principal response at looks rather similar, with a much smaller upconverted component appearing at :
The non-perturbative nature of the ansatz allows us to capture some behaviour which is not a mere extension of the usual single-harmonic Duffing response. Suppose we drive a strongly nonlinear resonator at frequency . Such a drive is far out of resonance, however, the upconverted harmonic is not and may play an important role! Let us try this out:
A steady state result for 100 parameter points
+
+Solution branches: 9
+ of which real: 3
+ of which stable: 2
+
+Classes: stable, physical, Hopf, binary_labels
Although 9 branches were found in total, only 3 remain physical (real-valued). Let us visualise the amplitudes corresponding to the two harmonics, and :
The contributions of and are now comparable and the system shows some fairly complex behaviour! This demonstrates how an exact solution within an extended Fourier subspace goes beyond a perturbative treatment.
+
+
+
+
\ No newline at end of file
diff --git a/v0.10.10/tutorials/time_dependent.html b/v0.10.10/tutorials/time_dependent.html
new file mode 100644
index 00000000..82fe4682
--- /dev/null
+++ b/v0.10.10/tutorials/time_dependent.html
@@ -0,0 +1,63 @@
+
+
+
+
+
+ Time-dependent simulations | HarmonicBalance.jl
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Most of HarmonicBalance.jl is focused on finding and analysing the steady states. Such states contain no information about transient behaviour, which is crucial to answer the following.
Given an initial condition, which steady state does the system evolve into?
How does the system behave if its parameters are varied in time?
It is straightforward to evolve the full equation of motion using an ODE solver. However, tracking oscillatory behaviour is computationally expensive.
In the background, we showed that nonlinear driven systems may be reduced to harmonic equations
As long as the chosen harmonics constituting capture the system's behaviour, we may numerically evolve the new effective differential equations instead of the full problem. Since the components of only vary very slowly (and are constant in a steady state), this is usually vastly more efficient than evolving the full problem.
Here we primarily demonstrate on the parametrically driven oscillator.
The object harmonic_eq encodes the new effective differential equations.
We now wish to parse this input into OrdinaryDiffEq.jl and use its powerful ODE solvers. The desired object here is OrdinaryDiffEq.ODEProblem, which is then fed into OrdinaryDiffEq.solve.
Experimentally, the primary means of exploring the steady state landscape is an adiabatic sweep one or more of the system parameters. This takes the system along a solution branch. If this branch disappears or becomes unstable, a jump occurs.
The object ParameterSweep specifies a sweep, which is then used as an optional sweep keyword in the ODEProblem constructor.
We see the system first evolves from the initial condition towards the low-amplitude steady state. The amplitude increases as the sweep proceeds, with a jump occurring around (i.e., time 18000).
+
+
+
+
\ No newline at end of file
diff --git a/versions.js b/versions.js
index bb526fc4..bae2f648 100644
--- a/versions.js
+++ b/versions.js
@@ -9,5 +9,5 @@ var DOC_VERSIONS = [
"v0.4",
"dev",
];
-var DOCUMENTER_NEWEST = "v0.10.9";
+var DOCUMENTER_NEWEST = "v0.10.10";
var DOCUMENTER_STABLE = "stable";