diff --git a/docs/Edge/Raspberry_Pi_Devices/reTerminal/Application/UI_design/reTerminal-build-UI-using-LVGL.md b/docs/Edge/Raspberry_Pi_Devices/reTerminal/Application/UI_design/reTerminal-build-UI-using-LVGL.md
index 5c6452d41897..5b4c349c1410 100644
--- a/docs/Edge/Raspberry_Pi_Devices/reTerminal/Application/UI_design/reTerminal-build-UI-using-LVGL.md
+++ b/docs/Edge/Raspberry_Pi_Devices/reTerminal/Application/UI_design/reTerminal-build-UI-using-LVGL.md
@@ -147,7 +147,7 @@ To see how can you build your own UI application for reTerminal with LVGL 8.0, y
All the necessary components are imported and initialized in main.c, after that the main UI function is called. The UI description, callbacks and helper functions are located inside of **lv_demo_reterminal_UI/lv_demo_reterminal_UI.c**.
-```C
+```cpp
tv = lv_tabview_create(lv_scr_act(), LV_DIR_TOP, tab_h);
lv_obj_set_style_text_font(lv_scr_act(), font_normal, 0);
@@ -166,7 +166,7 @@ We create a Tabview widget on the active screen and populate it with three tabs:
The content of each tab is initialized separately in a corresponding function:
-```C
+```cpp
assistant_create(t1);
debug_create(t2);
stats_create(t3);
@@ -178,7 +178,7 @@ The content of each tab is initialized separately in a corresponding function:
Additionally color changer elements are created on the Tabview widget and built-in accelerometer is initialized. After that we create three timer callbacks with dummy input data:
-```C
+```cpp
static uint32_t user_data = 10;
lv_timer_t * time_timer = lv_timer_create(time_timer_cb, 1, &user_data);
lv_timer_t * system_timer = lv_timer_create(system_timer_cb, 500, &user_data);
@@ -187,7 +187,7 @@ Additionally color changer elements are created on the Tabview widget and built-
These are responsible for getting system time, system status (CPU, Mem, Disk Space, Ethernet current speed, etc) and accelerometer readings respectively. You can find these three callback functions at the bottom of the lv_demo_reterminal_UI.c.
-```C
+```cpp
void time_timer_cb(lv_timer_t * timer)
{
@@ -245,7 +245,7 @@ If you decide to follow our demo application closely when creating your first UI
**assistant_create**
We create a panel object for the tab and set its height.
-```C
+```cpp
lv_obj_t * panel1 = lv_obj_create(parent);
lv_obj_set_height(panel1, lv_pct(100));
```
@@ -256,7 +256,7 @@ Then we create an image button object from C array located in assets folder, obt
-```C
+```cpp
LV_IMG_DECLARE(speech_btn_img);
/*Create a transition animation on width transformation and recolor.*/
@@ -289,7 +289,7 @@ In the next code block we create text labels for time, date, user greeting. Thes
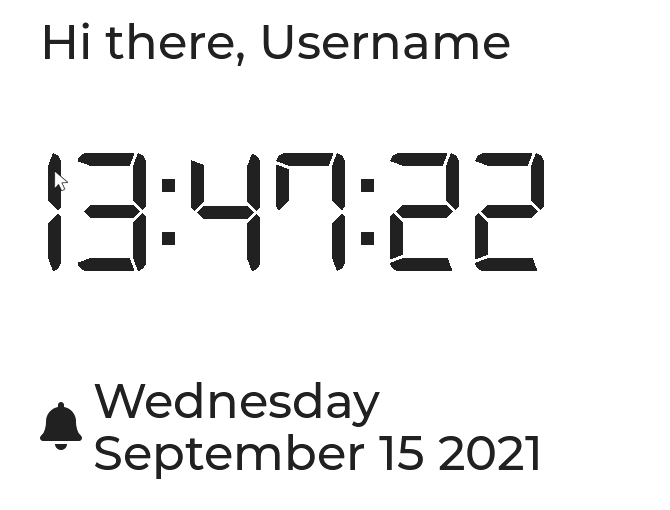
-```C
+```cpp
lv_obj_t * name = lv_label_create(panel1);
lv_label_set_text(name, "Hi there, Username");
lv_obj_add_style(name, &style_large, 0);
@@ -318,7 +318,7 @@ Note that the grid layout feature of LVGL needs to be globally enabled with ```L
You can read about Layouts in LVGL in more detail by following [this link](https://docs.lvgl.io/master/layouts/grid.html).
-```C
+```cpp
static lv_coord_t grid_main_col_dsc[] = {LV_GRID_FR(1), LV_GRID_FR(1), LV_GRID_TEMPLATE_LAST};
static lv_coord_t grid_main_row_dsc[] = {LV_GRID_CONTENT, LV_GRID_CONTENT, LV_GRID_TEMPLATE_LAST};
diff --git a/docs/Edge/Raspberry_Pi_Devices/reTerminal/Application/UI_design/weather-dashboard-with-Grafana-reTerminal.md b/docs/Edge/Raspberry_Pi_Devices/reTerminal/Application/UI_design/weather-dashboard-with-Grafana-reTerminal.md
index 71233d6345f5..6ec581567581 100644
--- a/docs/Edge/Raspberry_Pi_Devices/reTerminal/Application/UI_design/weather-dashboard-with-Grafana-reTerminal.md
+++ b/docs/Edge/Raspberry_Pi_Devices/reTerminal/Application/UI_design/weather-dashboard-with-Grafana-reTerminal.md
@@ -127,7 +127,7 @@ To collect the weather data, we are going to be using an ESP32 with a DHT11 sens
- **Step 2.** Copy the following codes in the skecth.
-```c++
+```cpp
#include //Import the required libraries
#include "DHT.h"
#include "Seeed_BMP280.h"
diff --git a/docs/FAQ/XIAO/check_battery_voltage.md b/docs/FAQ/XIAO/check_battery_voltage.md
index 679172b1ff81..dbc8b104f7f6 100644
--- a/docs/FAQ/XIAO/check_battery_voltage.md
+++ b/docs/FAQ/XIAO/check_battery_voltage.md
@@ -27,7 +27,7 @@ In addition, during communication in particular, spike-like errors occurred, whi
The following is the procedure to test the battery voltage.
-```c++
+```cpp
void setup() {
Serial.begin(115200);
pinMode(A0, INPUT); // ADC
diff --git a/docs/Network/SenseCAP_K1100/Embedded_ML_Application/K1111-Edge-Impulse.md b/docs/Network/SenseCAP_K1100/Embedded_ML_Application/K1111-Edge-Impulse.md
index 8dcead1db813..6d8cbd7ca2b6 100644
--- a/docs/Network/SenseCAP_K1100/Embedded_ML_Application/K1111-Edge-Impulse.md
+++ b/docs/Network/SenseCAP_K1100/Embedded_ML_Application/K1111-Edge-Impulse.md
@@ -170,7 +170,7 @@ After we generated the library from Edge Impulse. We need to modify the code for
Flash the test code below.
-```c++
+```cpp
#include
#include"LIS3DHTR.h"
#include"TFT_eSPI.h"
diff --git a/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Helium_Cloud_Services/Helium_Connected&Azure_Integrated/Connecting-to-Helium.md b/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Helium_Cloud_Services/Helium_Connected&Azure_Integrated/Connecting-to-Helium.md
index 37b2062caaf3..9b9db85e361f 100644
--- a/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Helium_Cloud_Services/Helium_Connected&Azure_Integrated/Connecting-to-Helium.md
+++ b/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Helium_Cloud_Services/Helium_Connected&Azure_Integrated/Connecting-to-Helium.md
@@ -152,7 +152,7 @@ The above code has no restrictions on the Grove - Wio-E5 connection, it will aut
:::
Please select the LoRaWAN® band you wish to use. This band must be consistent with the gateway band you are using. The available frequency bands are in the comments of the code below. In the tutorials we use, the default is the **EU868** band.
-```c++
+```cpp
#define Frequency DSKLORAE5_ZONE_EU868
/*
Select your frequency band here.
@@ -532,7 +532,7 @@ If you want to apply the content of this tutorial to your own project developmen
At the beginning of the program, we need to prepare the necessary triad information to connect to Helium and to set the frequency of the Wio-E5.
-```c++
+```cpp
#define Frequency DSKLORAE5_ZONE_EU868
/*
Select your frequency band here.
@@ -556,7 +556,7 @@ Next, a `data_decord()` function is defined. This function converts the sensor v
In general, to prevent data overflow, we need to consider the maximum and minimum values that the sensor may read. And split into hexadecimal numbers that will not overflow.
-```c++
+```cpp
void data_decord(int val_1, int val_2, uint8_t data[4])
{
int val[] = {val_1, val_2};
@@ -580,20 +580,20 @@ void data_decord(int val_1, int val_2, uint8_t data[4])
For the SHT40 sensor, he will have two data, one is temperature data and one is humidity data, and there are positive and negative values, so the negative numbers need to be processed, and also the decimal places need to be processed.
-```c++
+```cpp
int_temp = temperature*100;
int_humi = humidity*100;
```
The next step is the initialization of the SHT40 and the initial setup of the Wio-E5. These will all be executed in the `setup()` function.
-```c++
+```cpp
lorae5.begin(DSKLORAE5_SWSERIAL_WIO_P2)
```
In the initialization code, `DSKLORAE5_SWSERIAL_WIO_P2` represents the Grove interface on the **right** side of the Wio Terminal, while `DSKLORAE5_SWSERIAL_WIO_P1` represents the Grove interface on the **left** side. For other projects without external sensors, you can also use `DSKLORAE5_SEARCH_WIO` , which will automatically search for the Grove interface your Wio-E5 is connected to.
-```c++
+```cpp
lorae5.send_sync( //Sending the sensor values out
8, // LoRaWan Port
data, // data array
@@ -606,7 +606,7 @@ lorae5.send_sync( //Sending the sensor values out
The important role of the `send_sync()` function is to send the sensor values over the LoRaWAN®. The first parameter indicates the channel number to send the data, the second parameter indicates the content of the data sent, and the third parameter indicates the length of the data sent. In general, we only need to focus on the content of the first three parameters.
-```c++
+```cpp
delay(15000);
```
diff --git a/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-IMU-Sensor-Grove-LoRa-E5.md b/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-IMU-Sensor-Grove-LoRa-E5.md
index c1ab3e392b99..479788e3b674 100644
--- a/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-IMU-Sensor-Grove-LoRa-E5.md
+++ b/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-IMU-Sensor-Grove-LoRa-E5.md
@@ -171,7 +171,7 @@ Now, the 3-Axis Digital Accelerometer library can be installed to the Arduino ID
This repo demonstrates how to use the built-in IMU sensor as a component in Wio Terminal. Using the library's **getAccelerationX()**, **getAccelerationY()**, and **getAccelerationZ()** functions, you can directly obtain the X-axis, Y-axis, and Z-axis offsets of the IMU sensor. These three values may be positive or negative float numbers.
-```c++
+```cpp
#include"LIS3DHTR.h"
LIS3DHTR lis;
diff --git a/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-Soil-Moisture-Sensor-Grove-LoRa-E5.md b/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-Soil-Moisture-Sensor-Grove-LoRa-E5.md
index 386632ea0f11..234c836d9c3b 100644
--- a/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-Soil-Moisture-Sensor-Grove-LoRa-E5.md
+++ b/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-Soil-Moisture-Sensor-Grove-LoRa-E5.md
@@ -157,7 +157,7 @@ The reason why the wiring method of the soil moisture sensor is different from o
This repo demonstrates how to use the soil moisture sensor. The soil moisture sensor uses an analog interface where you can simply read the moisture value of the soil by reading its pins.
-```c++
+```cpp
int sensorPin = A0;
int sensorValue = 0;
diff --git a/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-Temp-Humi-Sensor-Grove-LoRa-E5.md b/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-Temp-Humi-Sensor-Grove-LoRa-E5.md
index 54603146cd3c..439250e066af 100644
--- a/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-Temp-Humi-Sensor-Grove-LoRa-E5.md
+++ b/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-Temp-Humi-Sensor-Grove-LoRa-E5.md
@@ -174,7 +174,7 @@ Now, the Grove Temp&Humi Sensor library can be installed to the Arduino IDE. Ope
This repo shows us the temperature and humidity data obtained. In the code, we use the `measureHighPrecision()` function to get the temperature and humidity information, which is positive and float.
-```c++
+```cpp
#include
#include
#include
diff --git a/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-VOC-and-eCO2-Gas-Sensor-Grove-LoRa-E5.md b/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-VOC-and-eCO2-Gas-Sensor-Grove-LoRa-E5.md
index 928df8c2dba2..e96facea89c2 100644
--- a/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-VOC-and-eCO2-Gas-Sensor-Grove-LoRa-E5.md
+++ b/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-VOC-and-eCO2-Gas-Sensor-Grove-LoRa-E5.md
@@ -170,7 +170,7 @@ Now, the Grove VOC and eCO2 Gas Sensor library can be installed to the Arduino I
This repo shows us the VOC and eCO2 data obtained. In the code, we use the `sgp_measure_signals_blocking_read()` function to get the VOC and eCO2 information, which is positive and integer.
-```c++
+```cpp
#include
#include "sensirion_common.h"
#include "sgp30.h"
diff --git a/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-Vision-AI-Module-Grove-LoRa-E5.md b/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-Vision-AI-Module-Grove-LoRa-E5.md
index dbcec9b075e3..b3b276d84089 100644
--- a/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-Vision-AI-Module-Grove-LoRa-E5.md
+++ b/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/Sensors_Basic_Usage_with_Arduino/K1100-Vision-AI-Module-Grove-LoRa-E5.md
@@ -171,7 +171,7 @@ Now, the Vision AI Module library can be installed to the Arduino IDE. Open the
This repo is able to obtain the number of models identified by the camera feed and the confidence level. They are unsigned integer data with no more than 8 bits.
-```c++
+```cpp
#include "Seeed_Arduino_GroveAI.h"
#include
diff --git a/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/TTN_Cloud_Services/Connecting-to-TTN.md b/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/TTN_Cloud_Services/Connecting-to-TTN.md
index 1ca66ab9eb5c..408c2dd28afc 100644
--- a/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/TTN_Cloud_Services/Connecting-to-TTN.md
+++ b/docs/Network/SenseCAP_K1100/LoRaWAN-Network_Application/TTN_Cloud_Services/Connecting-to-TTN.md
@@ -83,7 +83,7 @@ Please download the necessary environment for Arduino and Wio Terminal in [pre-a
Click [here](https://github.com/limengdu/Seeed-Studio-LoRaWAN-Dev-Kit/blob/main/example/Get-Grove-LoRa-E5-AppEUI-DevEUI/Get-Grove-LoRa-E5-AppEUI-DevEUI.ino) to download the code for the DevEUI, AppEUI that comes with Grove - Wio-E5 and upload it to Wio Terminal.
-```c++
+```cpp
#include
#include "disk91_LoRaE5.h"
@@ -164,7 +164,7 @@ lorae5.sendATCommand("AT+KEY=APPKEY,\"2B7E151628XXXXXXXXXX158809CF4F3C\"","","+K
Here is the complete code.
-```c++
+```cpp
#include
#include "disk91_LoRaE5.h"
@@ -472,7 +472,7 @@ If you want to apply the content of this tutorial to your own project developmen
At the beginning of the program, we need to prepare the necessary triad information to connect to TTN and to set the frequency of the Wio-E5.
-```c++
+```cpp
#define Frequency DSKLORAE5_ZONE_EU868
/*
Select your frequency band here.
@@ -496,7 +496,7 @@ Next, a `data_decord()` function is defined. This function converts the sensor v
In general, to prevent data overflow, we need to consider the maximum and minimum values that the sensor may read. And split into hexadecimal numbers that will not overflow.
-```c++
+```cpp
void data_decord(int val_1, int val_2, uint8_t data[4])
{
int val[] = {val_1, val_2};
@@ -520,20 +520,20 @@ void data_decord(int val_1, int val_2, uint8_t data[4])
For the SHT40 sensor, he will have two data, one is temperature data and one is humidity data, and there are positive and negative values, so the negative numbers need to be processed, and also the decimal places need to be processed.
-```c++
+```cpp
int_temp = temperature*100;
int_humi = humidity*100;
```
The next step is the initialization of the SHT40 and the initial setup of the Wio-E5. These will all be executed in the `setup()` function.
-```c++
+```cpp
lorae5.begin(DSKLORAE5_SWSERIAL_WIO_P2)
```
In the initialization code, `DSKLORAE5_SWSERIAL_WIO_P2` represents the Grove interface on the **right** side of the Wio Terminal, while `DSKLORAE5_SWSERIAL_WIO_P1` represents the Grove interface on the **left** side. For other projects without external sensors, you can also use `DSKLORAE5_SEARCH_WIO` , which will automatically search for the Grove interface your Wio-E5 is connected to.
-```c++
+```cpp
lorae5.send_sync( //Sending the sensor values out
8, // LoRaWan Port
data, // data array
@@ -546,7 +546,7 @@ lorae5.send_sync( //Sending the sensor values out
The important role of the `send_sync()` function is to send the sensor values over the LoRaWAN®. The first parameter indicates the channel number to send the data, the second parameter indicates the content of the data sent, and the third parameter indicates the length of the data sent. In general, we only need to focus on the content of the first three parameters.
-```c++
+```cpp
delay(15000);
```
diff --git a/docs/Network/SenseCAP_K1100/Wi-Fi-Network_Application/Cloud_Service/Connect-Wio-Terminal-to-Google-Cloud.md b/docs/Network/SenseCAP_K1100/Wi-Fi-Network_Application/Cloud_Service/Connect-Wio-Terminal-to-Google-Cloud.md
index be855c7f3cd4..92edd121b06d 100644
--- a/docs/Network/SenseCAP_K1100/Wi-Fi-Network_Application/Cloud_Service/Connect-Wio-Terminal-to-Google-Cloud.md
+++ b/docs/Network/SenseCAP_K1100/Wi-Fi-Network_Application/Cloud_Service/Connect-Wio-Terminal-to-Google-Cloud.md
@@ -248,14 +248,14 @@ Now we need to set the Wi-Fi credentials and Google Cloud IoT Core information i
- **STEP 3:** Change the **Wifi network details**
-```c++
+```cpp
const char *ssid = "Enter_SSID";
const char *password = "Enter_Password";
```
- **STEP 4:** Change the **Google Cloud IoT details**
-```c++
+```cpp
const char *project_id = "Enter_Project_ID";
const char *location = "Enter_location";
const char *registry_id = "Enter_Registry_ID";
@@ -264,7 +264,7 @@ const char *device_id = "Enter_Device_ID";
- **STEP 5:** Copy the private key bytes that we obtained from **ec_private.pem** and saved into notepad before
-```c++
+```cpp
const char *private_key_str =
"6e:b8:17:35:c7:fc:6b:d7:a9:cb:cb:49:7f:a0:67:"
"63:38:b0:90:57:57:e0:c0:9a:e8:6f:06:0c:d9:ee:"
@@ -277,7 +277,7 @@ const char *private_key_str =
Open **esp32-mqtt.h** and replace the entire file with the following codes. Here we have replaced configTime function with the implementation of obtaining NTP time via UDP.
-```c++
+```cpp
#include
#include
#include
@@ -484,7 +484,7 @@ void setupCloudIoT(){
Add Wio Terminal board to macro definitions inside **Esp32-lwmqtt.ino**
-```c++
+```cpp
#if defined(ESP32) || defined(WIO_TERMINAL)
#define __ESP32_MQTT_H__
#endif
@@ -546,7 +546,7 @@ Navigate to **Esp32-lwmqtt.ino** and add the following
- **STEP 1:** After the loop, add the following for the built-in light sensor
-```c++
+```cpp
void loop() {
int light = analogRead(WIO_LIGHT); //assign variable to store light sensor values
light = map(light,0,1023,0,100); //Map sensor values
@@ -554,7 +554,7 @@ void loop() {
- **STEP 2:** Add the topic with the Subfolder name
-```c++
+```cpp
publishTelemetry(getDefaultSensor());
publishTelemetry("/light",String(light));
```
@@ -590,7 +590,7 @@ Navigate to the previously used **Esp32-lwmqtt.ino** and add the following:
- **STEP 1:** Add the following after **#include "esp32-mqtt.h"**
-```c++
+```cpp
#include "DHT.h" //DHT library
#define DHTPIN 0 //Define Signal Pin of DHT
@@ -600,13 +600,13 @@ DHT dht(DHTPIN, DHTTYPE); //Initializing DHT sensor
- **STEP 2:** Add the following inside the **setup** to start the DHT sensor
-```c++
+```cpp
dht.begin();
```
- **STEP 3:** Add the following inside the **if loop** within **void loop()**
-```c++
+```cpp
int temperature = dht.readTemperature(); //Assign variable to store temperature
int humidity = dht.readHumidity(); //Assign variable to store humidity
diff --git a/docs/Network/SenseCAP_K1100/Wi-Fi-Network_Application/Cloud_Service/Getting_started_with_Ubidots.md b/docs/Network/SenseCAP_K1100/Wi-Fi-Network_Application/Cloud_Service/Getting_started_with_Ubidots.md
index 12cac8cf8737..c04d175ae808 100644
--- a/docs/Network/SenseCAP_K1100/Wi-Fi-Network_Application/Cloud_Service/Getting_started_with_Ubidots.md
+++ b/docs/Network/SenseCAP_K1100/Wi-Fi-Network_Application/Cloud_Service/Getting_started_with_Ubidots.md
@@ -206,7 +206,7 @@ To establish an MQTT connection, we will need to prepare the following informati
At the beginning of the program below, we will define for these requirements at the top of the code, please fill in your own information as appropriate.
-```c++
+```cpp
//examples
#define WIFISSID "" // Put your WifiSSID here
#define PASSWORD "
#include
#include
@@ -420,7 +420,7 @@ void loop() {
If you want to send Grove Soil Moisture Sensor data to Ubidots, paste the complete code below into the Arduino and upload it to the Wio Terminal.
-```c++
+```cpp
#include
#include
#include
@@ -553,7 +553,7 @@ void loop() {
If you want to send Grove VOC and eCO2 Gas Sensor data to Ubidots, paste the complete code below into the Arduino and upload it to the Wio Terminal.
-```c++
+```cpp
#include
#include
#include
@@ -711,7 +711,7 @@ void loop() {
If you want to send Grove Temp&Humi Sensor data to Ubidots, paste the complete code below into the Arduino and upload it to the Wio Terminal.
-```c++
+```cpp
#include
#include
#include
@@ -866,7 +866,7 @@ void loop() {
If you want to send Grove Vision Ai Module data to Ubidots, paste the complete code below into the Arduino and upload it to the Wio Terminal.
-```c++
+```cpp
#include
#include
#include
diff --git a/docs/Seeed_Elderly/Air_Serial/Air602_WiFi_Development_Board.md b/docs/Seeed_Elderly/Air_Serial/Air602_WiFi_Development_Board.md
index bde0839ae5d3..50dd947eea7c 100644
--- a/docs/Seeed_Elderly/Air_Serial/Air602_WiFi_Development_Board.md
+++ b/docs/Seeed_Elderly/Air_Serial/Air602_WiFi_Development_Board.md
@@ -110,7 +110,7 @@ What ever, please make sure you have checked the option **AddCrLf**, and set the
Tap **AT+** then click **SEND** or press `enter` key to to check if the connection was successfully established.
-```C
+```cpp
AT+
```
@@ -120,19 +120,19 @@ When it returns **+OK**, you can use the AT command to control this module.
- 1- **WPRT** sets the wireless network card working mode to SoftAP:
-```C
+```cpp
AT+WPRT=2
```
- 2- **APSSID** Set the AP SSID for the STA, e.g.*MyAP*:
-```C
+```cpp
AT+APSSID=MyAp
```
- 3- **APENCRY** Set the wireless network card security mode to WEP64:
-```C
+```cpp
AT+APENCRY=1
```
@@ -142,7 +142,7 @@ open:0,WEP64:1,WEP128:2
- 4- **APKEY** Set the wireless network card key to *12345*
-```C
+```cpp
AT+APKEY=1,1,12345
```
@@ -154,7 +154,7 @@ Parameter 3:wireless key, e.g.:12345
- 5- **APNIP** Set the ip address and subnet mask
-```C
+```cpp
AT+APNIP=1,192.168.1.1,255.255.255.0,192.168.1.1,192.168.1.1
```
@@ -166,19 +166,19 @@ parameter 5:dns:192.168.1.1
- 6- **PMTF** saves the above parameters to spi flash, just start from step 7 with the next boot.
-```C
+```cpp
AT+PMTF
```
- 7- **WJOIN** Create wireless network *MyAp*
-```C
+```cpp
AT+WJOIN
```
- 8- **SLIST** Query the STA information which connected to your SoftAP.
-```C
+```cpp
AT+SLIST
```
@@ -186,7 +186,7 @@ AT+SLIST
Wireless network card scanning AP's AT command is :
-```C
+```cpp
AT+WSCAN
```
@@ -198,19 +198,19 @@ The last paremeter is the signal strength, unit db
- 1- **WPRT** Set the working mode to STA
-```C
+```cpp
AT+WPRT=0
```
- 2- **SSID** Set the AP name to join. e.g. *TEST_AP*
-```C
+```cpp
AT+SSID=TEST_AP
```
- 3- **KEY** Set the wireless key of the AP you want to join. e.g. *12345678*
-```C
+```cpp
AT+KEY=1,0,12345678
```
@@ -222,19 +222,19 @@ parameter 3: Wireless key e.g.:12345678
- 4- **NIP** Enable DHCP
-```C
+```cpp
AT+NIP=0
```
- 5- PMTF Save the above parameters to spi flash, Just start from step 6 with the next boot
-```C
+```cpp
AT+PMTF
```
- 6- WJOIN Join the wireless network TEST_AP
-```C
+```cpp
AT+WJOIN
```
@@ -244,19 +244,19 @@ AT+WJOIN
- 1- **WPRT** Set the working mode to APSTA
-```C
+```cpp
AT+WPRT=3
```
- 2- **SSID** Set the AP name to be joined, such as *TEST_AP*
-```C
+```cpp
AT+SSID=TEST_AP
```
- 3- **KEY** Set the wireless key of the AP you want to join. e.g. *12345678*
-```C
+```cpp
AT+KEY=1,0,12345678
```
@@ -268,37 +268,37 @@ parameter 3: Wireless key e.g.:12345678
- 4- **APSSID** Set the network name of the created SOFTAP
-```C
+```cpp
AT+APSSID=”MYSoftAP”
```
- 5- **APENCRY** Set the encryption type of SoftAP (such as WPA2-TKIP)
-```C
+```cpp
AT+APENCRY=5
```
- 6- **APKEY** Set the password for SoftAP (e.g. ASCII code 87654321)
-```C
+```cpp
AT+APKEY=1,0,87654321
```
- 7- **APNIP** Set the IP address and subnet mask
-```C
+```cpp
AT+APNIP=1,192.168.1.1,255.255.255.0,192.168.1.1,192.168.1.1
```
- 8- **PMTF** Save the above parameters to spi flash, just start from step 9
-```C
+```cpp
AT+PMTF
```
- 9- **WJOIN** Join the wireless network TEST_AP
-```C
+```cpp
AT+WJOIN
```
@@ -314,7 +314,7 @@ For the firmware programming please check here:
A: The wireless network card disconnects the AP's AT command:
-```C
+```cpp
AT+WLEAV
```
@@ -322,7 +322,7 @@ AT+WLEAV
A: The AT command of SoftAP disconnected network is:
-```C
+```cpp
AT+WLEAV=2
```
@@ -330,7 +330,7 @@ AT+WLEAV=2
A: The AT command for the wireless network card to view the status of the current network card is:
-```C
+```cpp
AT+LKSTT
```
@@ -338,7 +338,7 @@ AT+LKSTT
A: The AT command to view the current SoftAP status is:
-```C
+```cpp
AT+APLKSTT
```
diff --git a/docs/Seeed_Elderly/Artik/Eagleye_530s.md b/docs/Seeed_Elderly/Artik/Eagleye_530s.md
index 8a4712ff12af..4c2241834aa0 100644
--- a/docs/Seeed_Elderly/Artik/Eagleye_530s.md
+++ b/docs/Seeed_Elderly/Artik/Eagleye_530s.md
@@ -984,7 +984,7 @@ git clone https://github.com/DexterInd/GrovePi.git
- Step 2. Modify the source code /root/GrovePi/Software/Cpp/grovepi.cpp and add one line as shown.
-```c++
+```cpp
void GrovePi::SMBusName(char *smbus_name)
{
unsigned int hw_revision = gpioHardwareRevision();
diff --git a/docs/Seeed_Elderly/Bee/Bluetooth_Bee.md b/docs/Seeed_Elderly/Bee/Bluetooth_Bee.md
index 964e2e355874..c234706aa489 100644
--- a/docs/Seeed_Elderly/Bee/Bluetooth_Bee.md
+++ b/docs/Seeed_Elderly/Bee/Bluetooth_Bee.md
@@ -291,7 +291,7 @@ xx status:
The following sketch configures **Bluetooth Bee** for [Transportunternehmen](http://aps-solver.de/leistungen/) as Slave Device and waits for connection request from PC or other master device.
Bluetooth Bee is connected to Seeeduino via XBee Shield as shown above. Bluetooth Bee is connected to digital Pins 11 and 12 of Arduino / Seeduino. We use NewSoftSerial library for supporting serial communication on these pins. The hardware serial port of Arduino is available for uploading sketch or debugging. This sketch uses a flow control mechanism using CheckOK(). It avoids using arbitrary delay between each command. If CheckOK() is not required, use a delay of at least 3 seconds between commands.
-```c++
+```cpp
/*
BluetoothBee Demo Code - Flowcontrol Based Implementation
2010,2011 Copyright (c) Seeed Technology Inc. All right reserved.
@@ -408,7 +408,7 @@ void sendBlueToothCommand(char command[])
The following sketch is a modification of above program using delay() instead of CheckOK(). In this case the hardware serial port is used for debugging purpose. Open serial monitor with setting 9600 baud. The complete communication between MCU and Bluetooth Bee will be visible in serial monitor.
-```c++
+```cpp
/*
BluetoothBee Demo Code - Delay Based Implementaion
2011 Copyright (c) Seeed Technology Inc. All right reserved.
diff --git a/docs/Seeed_Elderly/Radar_Sensor/Microwave-Sensor-24GHz-Doppler-Radar-Motion-Sensor-MW2401TR11.md b/docs/Seeed_Elderly/Radar_Sensor/Microwave-Sensor-24GHz-Doppler-Radar-Motion-Sensor-MW2401TR11.md
index 6c93ef4b0630..38e5f8939b2f 100644
--- a/docs/Seeed_Elderly/Radar_Sensor/Microwave-Sensor-24GHz-Doppler-Radar-Motion-Sensor-MW2401TR11.md
+++ b/docs/Seeed_Elderly/Radar_Sensor/Microwave-Sensor-24GHz-Doppler-Radar-Motion-Sensor-MW2401TR11.md
@@ -192,7 +192,7 @@ it just an example, you are able to use other devices with RX and TX port or s
- **step 2. setup Seeeduino Cortex-MO+, please follow** [seeedruino Cortex-MO+ instructions](https://wiki.seeedstudio.com/Seeeduino-Cortex-M0/)
- **step 3. copy the code into arduino IDE then upload.** [upload code guide](https://wiki.seeedstudio.com/Upload_Code/)
-```C
+```cpp
int MW_out = 2;
// set pin 2 as OUT port
void setup() {
diff --git a/docs/Seeed_Elderly/W600/W600_Module.md b/docs/Seeed_Elderly/W600/W600_Module.md
index b06905f7bf42..c254c5c32e4c 100644
--- a/docs/Seeed_Elderly/W600/W600_Module.md
+++ b/docs/Seeed_Elderly/W600/W600_Module.md
@@ -131,7 +131,7 @@ What ever, please make sure you have checked the option **AddCrLf**, and set the
Tap **AT+** then click **SEND** or press ++enter++ key to to check if the connection was successfully established.
-```C
+```cpp
AT+
```
@@ -141,19 +141,19 @@ When it returns **+OK**, you can use the AT command to control this module.
- 1- **WPRT** sets the wireless network card working mode to SoftAP:
-```C
+```cpp
AT+WPRT=2
```
- 2- **APSSID** Set the AP SSID for the STA, e.g.*MyAP*:
-```C
+```cpp
AT+APSSID=MyAp
```
- 3- **APENCRY** Set the wireless network card security mode to WEP64:
-```C
+```cpp
AT+APENCRY=1
```
@@ -163,7 +163,7 @@ open:0,WEP64:1,WEP128:2
- 4- **APKEY** Set the wireless network card key to *12345*
-```C
+```cpp
AT+APKEY=1,1,12345
```
@@ -175,7 +175,7 @@ Parameter 3:wireless key, e.g.:12345
- 5- **APNIP** Set the ip address and subnet mask
-```C
+```cpp
AT+APNIP=1,192.168.1.1,255.255.255.0,192.168.1.1,192.168.1.1
```
@@ -187,19 +187,19 @@ parameter 5:dns:192.168.1.1
- 6- **PMTF** saves the above parameters to spi flash, just start from step 7 with the next boot.
-```C
+```cpp
AT+PMTF
```
- 7- **WJOIN** Create wireless network *MyAp*
-```C
+```cpp
AT+WJOIN
```
- 8- **SLIST** Query the STA information which connected to your SoftAP.
-```C
+```cpp
AT+SLIST
```
@@ -207,7 +207,7 @@ AT+SLIST
Wireless network card scanning AP's AT command is :
-```C
+```cpp
AT+WSCAN
```
@@ -219,19 +219,19 @@ The last paremeter is the signal strength, unit db
- 1- **WPRT** Set the working mode to STA
-```C
+```cpp
AT+WPRT=0
```
- 2- **SSID** Set the AP name to join. e.g. *TEST_AP*
-```C
+```cpp
AT+SSID=TEST_AP
```
- 3- **KEY** Set the wireless key of the AP you want to join. e.g. *12345678*
-```C
+```cpp
AT+KEY=1,0,12345678
```
@@ -243,19 +243,19 @@ parameter 3: Wireless key e.g.:12345678
- 4- **NIP** Enable DHCP
-```C
+```cpp
AT+NIP=0
```
- 5- PMTF Save the above parameters to spi flash, Just start from step 6 with the next boot
-```C
+```cpp
AT+PMTF
```
- 6- WJOIN Join the wireless network TEST_AP
-```C
+```cpp
AT+WJOIN
```
@@ -265,19 +265,19 @@ AT+WJOIN
- 1- **WPRT** Set the working mode to APSTA
-```C
+```cpp
AT+WPRT=3
```
- 2- **SSID** Set the AP name to be joined, such as *TEST_AP*
-```C
+```cpp
AT+SSID=TEST_AP
```
- 3- **KEY** Set the wireless key of the AP you want to join. e.g. *12345678*
-```C
+```cpp
AT+KEY=1,0,12345678
```
@@ -289,37 +289,37 @@ parameter 3: Wireless key e.g.:12345678
- 4- **APSSID** Set the network name of the created SOFTAP
-```C
+```cpp
AT+APSSID=”MYSoftAP”
```
- 5- **APENCRY** Set the encryption type of SoftAP (such as WPA2-TKIP)
-```C
+```cpp
AT+APENCRY=5
```
- 6- **APKEY** Set the password for SoftAP (e.g. ASCII code 87654321)
-```C
+```cpp
AT+APKEY=1,0,87654321
```
- 7- **APNIP** Set the IP address and subnet mask
-```C
+```cpp
AT+APNIP=1,192.168.1.1,255.255.255.0,192.168.1.1,192.168.1.1
```
- 8- **PMTF** Save the above parameters to spi flash, just start from step 9
-```C
+```cpp
AT+PMTF
```
- 9- **WJOIN** Join the wireless network TEST_AP
-```C
+```cpp
AT+WJOIN
```
@@ -339,7 +339,7 @@ For the firmware programming please check here:
A: The wireless network card disconnects the AP's AT command:
-```C
+```cpp
AT+WLEAV
```
@@ -347,7 +347,7 @@ AT+WLEAV
A: The AT command of SoftAP disconnected network is:
-```C
+```cpp
AT+WLEAV=2
```
@@ -355,7 +355,7 @@ AT+WLEAV=2
A: The AT command for the wireless network card to view the status of the current network card is:
-```C
+```cpp
AT+LKSTT
```
@@ -363,7 +363,7 @@ AT+LKSTT
A: The AT command to view the current SoftAP status is:
-```C
+```cpp
AT+APLKSTT
```
diff --git a/docs/Sensor/Beyond_Grove/Sensors/Gear_Stepper_Motor_Driver_Pack.md b/docs/Sensor/Beyond_Grove/Sensors/Gear_Stepper_Motor_Driver_Pack.md
index 5ea182d2fd8f..a63626b28f58 100755
--- a/docs/Sensor/Beyond_Grove/Sensors/Gear_Stepper_Motor_Driver_Pack.md
+++ b/docs/Sensor/Beyond_Grove/Sensors/Gear_Stepper_Motor_Driver_Pack.md
@@ -120,7 +120,7 @@ If this is the first time you work with Arduino, we strongly recommend you to se
- **Step 1.** Click the icon  in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```C++
+```cpp
int pwm1=9;
int pwm2=10;
int ctr_a =9;
diff --git a/docs/Sensor/Beyond_Grove/Sensors/Ultra_Sonic_range_measurement_module.md b/docs/Sensor/Beyond_Grove/Sensors/Ultra_Sonic_range_measurement_module.md
index b9b2d4f7392a..7277e7e4797c 100755
--- a/docs/Sensor/Beyond_Grove/Sensors/Ultra_Sonic_range_measurement_module.md
+++ b/docs/Sensor/Beyond_Grove/Sensors/Ultra_Sonic_range_measurement_module.md
@@ -107,7 +107,7 @@ A short ultrasonic pulse is transmitted at the time 0, reflected by an object. T
**Step 1.** Copy the code and flash it into the controller board.
**Step 2.** Upload the code and open monitor window.
-```C
+```cpp
#include "Arduino.h"
class Ultrasonic
{
diff --git a/docs/Sensor/Beyond_Grove/Sensors/Water-Flow-Sensor.md b/docs/Sensor/Beyond_Grove/Sensors/Water-Flow-Sensor.md
index 0068a3dfc75d..06f431b6f0b2 100755
--- a/docs/Sensor/Beyond_Grove/Sensors/Water-Flow-Sensor.md
+++ b/docs/Sensor/Beyond_Grove/Sensors/Water-Flow-Sensor.md
@@ -149,7 +149,7 @@ The code here **WORKS** for the most classic YF – S201, YF - S402 and other Wa
#### Software Code
-```C++
+```cpp
/*
YF‐ S201 Water Flow Sensor
Water Flow Sensor output processed to read in litres/hour
@@ -203,7 +203,7 @@ If everything goes well, open the serial monitor tool and set the baud rate to 9
In the code section, we used the following formula, so how did this formula come about?
-```C++
+```cpp
l_hour = (flow_frequency * 60 / 7.5)
```
@@ -211,26 +211,26 @@ Earlier we mentioned that with each revolution of the wheel, the volume of fluid
For the YF-S201, every liter of water that flows, the Hall Sensor outputs 450 pulses. Let’s do little math here. 450 pulse for 1 liter, so each pulse means 1/450 liter water flowing through. We take the total volume of liquid flowing through the water flow sensor at a certain time **t**(unit s) as **V_total**(unit L), and the total number of pulses detected as **N**. Then we get:
-```C++
+```cpp
V_total(L) = N* 1/450(L)
```
Also, the total volume of fluid flowing through the water flow sensor is equal to the **water flow rate(Q - unit L/s)** multiplied by time **t**(unit s) .
-```C++
+```cpp
V_total(L) = Q(L/s)*t(s)
```
So we get:
-```C++
+```cpp
N* 1/450 = Q(L/s)*t(s)
N/t = 450 * Q(L/s)
```
**N/t** happen to be frequency **f**, so:
-```C++
+```cpp
f = 450*Q(L/s);
Q(L/s) = f/450;
Q(L/min) = f*60/450 = f/7.5
@@ -239,7 +239,7 @@ Q(L/hour) = f*60*60/450 = f*60 /7.5
For the YF – S402, every liter of water that flows, the Hall Sensor outputs 4380 pulses. So, the formula should be:
-```C++
+```cpp
f = 4380*Q(L/s);
Q(L/s) = f/4380;
Q(L/min) = f*60/4380 = f/73
diff --git a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-16-Channel_PWM_Driver-PCA9685.md b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-16-Channel_PWM_Driver-PCA9685.md
index 480fab6369d3..c894fbd7ae3d 100755
--- a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-16-Channel_PWM_Driver-PCA9685.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-16-Channel_PWM_Driver-PCA9685.md
@@ -172,7 +172,7 @@ If you want to use servo, you can connect as shown below:
3. Or, you can just click the icon  in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```C++
+```cpp
#include "PCA9685.h"
#include
diff --git a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-2-Channel_SPDT_Relay.md b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-2-Channel_SPDT_Relay.md
index db462d9ec563..d09e85b672cf 100755
--- a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-2-Channel_SPDT_Relay.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-2-Channel_SPDT_Relay.md
@@ -129,7 +129,7 @@ The **SIG1** is pulled down by the 10k R2, if there is no signal, the 'Gate' of
- **Step 1.** Open the Arduino IDE and create a new file, then copy the following code into the new file.
-```c++
+```cpp
#include
uint8_t channel1 = 7;
uint8_t channel2 = 8;
diff --git a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-2-Channel_Solid_State_Relay.md b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-2-Channel_Solid_State_Relay.md
index 7d1deaca86a6..1e56f8e2b5b6 100755
--- a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-2-Channel_Solid_State_Relay.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-2-Channel_Solid_State_Relay.md
@@ -157,7 +157,7 @@ The **CTR1** is the control signal from the Arduino or other board. It is pulled
- **Step 1.** Open the Arduino IDE and create a new file, you can just click the icon  in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```c++
+```cpp
#include
uint8_t channel1 = 2;
uint8_t channel2 = 3;
diff --git a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-4-Channel_SPDT_Relay.md b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-4-Channel_SPDT_Relay.md
index 48b3318432ac..4ceee635b438 100755
--- a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-4-Channel_SPDT_Relay.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-4-Channel_SPDT_Relay.md
@@ -149,7 +149,7 @@ An introduction of **What is a Grove Relay Module** and **How does a Relay work*
Or, you can just click the icon  in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```c++
+```cpp
#include
Multi_Channel_Relay relay;
@@ -319,7 +319,7 @@ Channel 2 on
In case you want to change the address, you need to set the address before use. For example, we want to change it into 0x2f. We can use the following code.
-```C++
+```cpp
#include
Multi_Channel_Relay relay;
diff --git a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-4-Channel_Solid_State_Relay.md b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-4-Channel_Solid_State_Relay.md
index 3392a15fcf20..10345cb2081d 100755
--- a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-4-Channel_Solid_State_Relay.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-4-Channel_Solid_State_Relay.md
@@ -181,7 +181,7 @@ This is a typical Bi-directional level shifter circuit to connect two different
Or, you can just click the icon  in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```c++
+```cpp
#include
Multi_Channel_Relay relay;
@@ -275,7 +275,7 @@ void loop()
If every thing goes well, you will get the result. Meanwhile, you will see the on-board LEDs alternately lit and extinguished.
:::
-```c++
+```cpp
Scanning...
I2C device found at address 0x12 !
Found 1 I2C devices
@@ -343,7 +343,7 @@ Channel 2 on
In case you want to change the address, you need to set the address before use. For example, we want to change it into 0x2f. We can use the following code.
-```C++
+```cpp
#include
Multi_Channel_Relay relay;
diff --git a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-8-Channel_Solid_State_Relay.md b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-8-Channel_Solid_State_Relay.md
index 38fce331d810..64ce8aeefaa9 100755
--- a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-8-Channel_Solid_State_Relay.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-8-Channel_Solid_State_Relay.md
@@ -180,7 +180,7 @@ This is a typical Bi-directional level shifter circuit to connect two different
Or, you can just click the icon  in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```c++
+```cpp
#include
#define USE_8_CHANNELS (1)
@@ -302,7 +302,7 @@ void loop()
If every thing goes well, you will get the result. Meanwhile, you will see the on-board LEDs alternately lit and extinguished.
:::
-```c++
+```cpp
Scanning...
I2C device found at address 0x11 !
Found 1 I2C devices
@@ -376,7 +376,7 @@ Channel 2 on
In case you want to change the address, you need to set the address before use. For example, we want to change it into 0x2f. We can use the following code.
-```C++
+```cpp
#include
Multi_Channel_Relay relay;
diff --git a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Haptic_Motor.md b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Haptic_Motor.md
index 6623098a6621..13daf7c859bd 100755
--- a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Haptic_Motor.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Haptic_Motor.md
@@ -109,7 +109,7 @@ Grove - Haptic motor is a grove module integrated with [DRV2605L](http://www.ti.
- **Step 2.** Refer [How to install library](https://wiki.seeedstudio.com/How_to_install_Arduino_Library) to install library for Arduino.
- **Step 3.** Copy the code into Arduino IDE and upload. If you do not know how to upload the code, please check [how to upload code](https://wiki.seeedstudio.com/Upload_Code/).
-```c++
+```cpp
#include
DRV2605 haptic;
diff --git a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Infrared_Emitter.md b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Infrared_Emitter.md
index 6440705b3cd0..cc4dc0899eea 100755
--- a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Infrared_Emitter.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Infrared_Emitter.md
@@ -114,7 +114,7 @@ Copy the following **Send Example Code** to the Arduino IDE:
**Send Example Code:**
-```c++
+```cpp
/* send.ino Example sketch for IRLib2
* Illustrates how to send a code.
*/
diff --git a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-MP3-v3.md b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-MP3-v3.md
index 03294fd56e15..408fb152db54 100755
--- a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-MP3-v3.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-MP3-v3.md
@@ -94,7 +94,7 @@ As the name indicates, the Grove - MP3 V3 is the upgraded version of Grove - MP3
The WT2003S_Terminal_Player Example code is as follow:
-```C++
+```cpp
#include "WT2003S_Player.h"
#ifdef __AVR__
diff --git a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-MP3_v2.0.md b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-MP3_v2.0.md
index 51577e3aa7db..8a3b87104598 100755
--- a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-MP3_v2.0.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-MP3_v2.0.md
@@ -142,7 +142,7 @@ Most of arduino boards have at least one Serial, some have multiple serials(Ardu
For more info about the Serial, please refer to [Seeed Arduino Serial](https://wiki.seeedstudio.com/Seeed_Arduino_Serial/).
:::
-```c++
+```cpp
#ifdef __AVR__
#include
SoftwareSerial SSerial(2, 3); // RX, TX
diff --git a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Optocoupler_Relay-M281.md b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Optocoupler_Relay-M281.md
index 339db9ca48a5..3db0aea148f1 100755
--- a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Optocoupler_Relay-M281.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Optocoupler_Relay-M281.md
@@ -126,7 +126,7 @@ Unlike the other TRIAC SSR in our website, this relay is based on MOSFET, so it
- **Step 1.** Copy the following code into a new sketch in the Arduino IDE
-```C++
+```cpp
const int Pinout = 5;
void setup() {
diff --git a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Passive-Buzzer.md b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Passive-Buzzer.md
index e34aa1ca2cb0..de146b3f7256 100755
--- a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Passive-Buzzer.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Passive-Buzzer.md
@@ -63,7 +63,7 @@ The Grove interface on the breadboard and on the Grove Passive Buzzer are connec
#### Code example1 - simply get the beep sound
-```c++
+```cpp
int buzzer = 5; // Buzzer connect with Pin 5
int frequency = 2700; //reach the Resonant Frequency
int cycle = 1000000/frequency;
@@ -86,7 +86,7 @@ void loop()
#### Code example2 - Use buzzer to play music
-```c++
+```cpp
//set the corresponding notes with frequency
#define NOTE_D0 0
#define NOTE_D1 294
diff --git a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Solid_State_Relay_V2.md b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Solid_State_Relay_V2.md
index 5bad8e6355e8..ee40d9b3c46d 100755
--- a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Solid_State_Relay_V2.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Solid_State_Relay_V2.md
@@ -151,7 +151,7 @@ The **CTR** is the control signal from the Arduino or other board. It is pulled
- **Step 1.** Open the Arduino IDE and create a new file, you can just click the icon  in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```c++
+```cpp
#include
uint8_t pin = 7;
void setup() {
diff --git a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Speaker-Plus.md b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Speaker-Plus.md
index 8944b09d6085..6bbe322afd26 100755
--- a/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Speaker-Plus.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Actuator/Grove-Speaker-Plus.md
@@ -105,7 +105,7 @@ You can supply different frequency signal to this module with Arduino. Arduino g
If this is the first time you work with Arduino, we strongly recommend you to see [Getting Started with Arduino](https://wiki.seeedstudio.com/Getting_Started_with_Arduino/) before the start.
:::
-```C++
+```cpp
/*macro definition of Speaker pin*/
#define SPEAKER 3
diff --git a/docs/Sensor/Grove/Grove_Accessories/Current/Grove-10A_DC_Current_Sensor-ACS725.md b/docs/Sensor/Grove/Grove_Accessories/Current/Grove-10A_DC_Current_Sensor-ACS725.md
index efe18ae66795..bf6f3c9e4bfb 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Current/Grove-10A_DC_Current_Sensor-ACS725.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Current/Grove-10A_DC_Current_Sensor-ACS725.md
@@ -132,7 +132,7 @@ If this is the first time you work with Arduino, we strongly recommend you to se
- **Step 2.** In the /example/ folder, you can find the demo code. Here we take the **Grove_10A_Current_Sensor** for instance. Just click the [Grove_10A_Current_Sensor.ino](https://github.com/Seeed-Studio/Grove_Current_Sensor/blob/master/examples/Grove_10A_Current_Sensor/Grove_10A_Current_Sensor.ino) to open the demo. Or you can copy the following code:
-```C++
+```cpp
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define RefVal 3.3
#define SERIAL SerialUSB
@@ -226,14 +226,14 @@ Due to the presence of zero offset, the sensor will also have a reading when the
Line 19:
-```C++
+```cpp
float Vref = 322;
//Vref is zero drift value, you need to change this value to the value you actually measured before using it.
```
In the demo code, we set the Vref to 322, however, the zero offset value varies from board to board. As you know, the board we use in this demo is 346.68. So let's modify the Line 21:
-```C++
+```cpp
float Vref = 346.68;
```
diff --git a/docs/Sensor/Grove/Grove_Accessories/Current/Grove-2.5A-DC-Current-Sensor-ACS70331.md b/docs/Sensor/Grove/Grove_Accessories/Current/Grove-2.5A-DC-Current-Sensor-ACS70331.md
index 77781e168c8a..da97b1d0e6b2 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Current/Grove-2.5A-DC-Current-Sensor-ACS70331.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Current/Grove-2.5A-DC-Current-Sensor-ACS70331.md
@@ -151,7 +151,7 @@ If this is the first time you work with Arduino, we strongly recommend you to se
- **Step 2.** In the /example/ folder, you can find the demo code. Here we take the [Grove_2_5A_Current_Sensor.ino](https://github.com/Seeed-Studio/Grove_Current_Sensor/tree/master/examples/Grove_2_5A_Current_Sensor) for instance. Just click the Grove_2_5A_Current_Sensor.ino to open the demo. Or you can copy the following code:
-```C++
+```cpp
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define RefVal 3.3
#define SERIAL SerialUSB
@@ -248,14 +248,14 @@ Due to the presence of zero offset, the sensor will also have a reading when the
Line 21:
-```C++
+```cpp
float Vref = 265;
//Vref is zero drift value, you need to change this value to the value you actually measured before using it.
```
In the demo code, we set the Vref to 265, however, the zero offset value varies from board to board. As you know, the board we use in this demo is 288.09. So let's modify the Line 21:
-```C++
+```cpp
float Vref = 283.20;
```
diff --git a/docs/Sensor/Grove/Grove_Accessories/Current/Grove-5A_DC_AC_Current_Sensor-ACS70331.md b/docs/Sensor/Grove/Grove_Accessories/Current/Grove-5A_DC_AC_Current_Sensor-ACS70331.md
index 3becc603790e..f03a7748cc2b 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Current/Grove-5A_DC_AC_Current_Sensor-ACS70331.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Current/Grove-5A_DC_AC_Current_Sensor-ACS70331.md
@@ -156,7 +156,7 @@ If this is the first time you work with Arduino, we strongly recommend you to se
- **Step 2.** In the /example/ folder, you can find the demo code. Here we take the [Grove - ±5A DC/AC Current Sensor (ACS70331)](https://github.com/Seeed-Studio/Grove_Current_Sensor/blob/master/examples/Grove_5A_DC_Current_Sensor/Grove_5A_DC_Current_Sensor.ino) for instance. Just click the **Grove_5A_DC_Current_Sensor.ino** to open the demo. Or you can copy the following code:
-```C++
+```cpp
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define RefVal 3.3
#define SERIAL SerialUSB
@@ -254,14 +254,14 @@ Due to the presence of zero offset, the sensor will also have a reading when the
Line 32:
-```C++
+```cpp
float Vref = 1508;
//Vref is zero drift value, you need to change this value to the value you actually measured before using it.
```
In the demo code, we set the Vref to 1508, however, the zero offset value varies from board to board. As you know, the board we use in this demo is 595.70. So let's modify the Line 21:
-```C++
+```cpp
float Vref = 595.70;
```
@@ -288,7 +288,7 @@ When you use AC power, please pay attention to safety and avoid electric shock.
For the hardware connection and calibration part, please refer to the [DC Demo](#dc-demo), the only difference is the code. Please use the following code for AC load.
-```C++
+```cpp
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define RefVal 3.3
#define SERIAL SerialUSB
diff --git a/docs/Sensor/Grove/Grove_Accessories/Current/Grove-Coulomb_Counter_3.3V_to_5V-LTC2941.md b/docs/Sensor/Grove/Grove_Accessories/Current/Grove-Coulomb_Counter_3.3V_to_5V-LTC2941.md
index 4b7abd4882dd..95994f2dd0fe 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Current/Grove-Coulomb_Counter_3.3V_to_5V-LTC2941.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Current/Grove-Coulomb_Counter_3.3V_to_5V-LTC2941.md
@@ -186,7 +186,7 @@ If this is the first time you work with Arduino, we strongly recommend you to se
3. Or, you can just click the icon  in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```C++
+```cpp
#include "LTC2941.h"
@@ -242,7 +242,7 @@ The library file may be updated. This code may not be applicable to the updated
If every thing goes well, when you open the Serial Monitor and tap any key the press the send button , it may show as below:
:::
-```C++
+```cpp
LTC2941 Raw Data
1439.96C,399.99mAh,100.00%
1439.96C,399.99mAh,100.00%
@@ -255,7 +255,7 @@ LTC2941 Raw Data
In the demo, we use a 400mAh battery, so you can see the results `1439.96mC,399.99mAh,100.00%`. The percentage of remaining battery is valid only after you set the battery capacity. You can change the battery capacity at the code line 21,
-```C
+```cpp
ltc2941.setBatteryFullMAh(400); // set the battery capacity here
```
diff --git a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-16x2_LCD_Series.md b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-16x2_LCD_Series.md
index 8f0811d426c8..176b65c0a1b6 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-16x2_LCD_Series.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-16x2_LCD_Series.md
@@ -162,7 +162,7 @@ The first version of Grove - 16 x 2 LCD series does not have a built-in pull-up
in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```C++
+```cpp
#include
#include "rgb_lcd.h"
diff --git a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-LCD_RGB_Backlight.md b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-LCD_RGB_Backlight.md
index 8650059dcac8..8a48227f28ea 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-LCD_RGB_Backlight.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-LCD_RGB_Backlight.md
@@ -165,7 +165,7 @@ Here are some projects for your reference.
Here is the code of HelloWorld.ino.
-```c++
+```cpp
#include
#include "rgb_lcd.h"
@@ -371,7 +371,7 @@ if __name__=="__main__":
- Q2: How to use button to switch Grove RGB LCD to display different pages?
- A2: Here is the code.
-```c++
+```cpp
#include
#include "rgb_lcd.h"
diff --git a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED-Display-0.66-SSD1306_v1.0.md b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED-Display-0.66-SSD1306_v1.0.md
index 540701d32b84..c19214b2583c 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED-Display-0.66-SSD1306_v1.0.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED-Display-0.66-SSD1306_v1.0.md
@@ -93,7 +93,7 @@ This Grove-OLED Display supports the U8g2 monochrome displays library written by
- **Step 2.** Open the Arduino IDE and create a new file, then copy the following code into the new file.
-```C++
+```cpp
#include
#include
#include
diff --git a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED-Display-0.96-SSD1315.md b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED-Display-0.96-SSD1315.md
index 609940955f0d..c471ac89c586 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED-Display-0.96-SSD1315.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED-Display-0.96-SSD1315.md
@@ -95,7 +95,7 @@ Thanks to the new SSD1315 chip, it can work with 3.3V, so that we removed the ex
- **Step 2.** Open the Arduino IDE and create a new file, then copy the following code into the new file.
-```C++
+```cpp
#include
#include
diff --git a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED-Display-1.12-SH1107_V3.0.md b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED-Display-1.12-SH1107_V3.0.md
index 4da36ff05945..f6fa20d18ee9 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED-Display-1.12-SH1107_V3.0.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED-Display-1.12-SH1107_V3.0.md
@@ -100,7 +100,7 @@ This is an easy-to-use module, what you need to do is connect the module to I2C
- **Step 4.** Upload the demo code below in your Arduino IDE.
-```C++
+```cpp
#include
#include
#include
@@ -178,7 +178,7 @@ void loop(void) {
- **Step 3.** Upload the demo code below in your Arduino IDE.
-```C++
+```cpp
#include
#include
#include
diff --git a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED_Display_0.96inch.md b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED_Display_0.96inch.md
index 565b20556733..54ef3da270aa 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED_Display_0.96inch.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED_Display_0.96inch.md
@@ -117,7 +117,7 @@ The OLED128*64 uses all the pins of SSD1308 chip, the default original point is
- **Step 2.** Refer [How to install library](https://wiki.seeedstudio.com/How_to_install_Arduino_Library) to install library for Arduino.
- **Step 3.** Copy the code into Arduino IDE and upload. If you do not know how to upload the code, please check [how to upload code](https://wiki.seeedstudio.com/Upload_Code/).
-```CPP
+```cpp
#include
#include
diff --git a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED_Display_1.12inch.md b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED_Display_1.12inch.md
index 1f14ff838ff7..bce1ca6d1659 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED_Display_1.12inch.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-OLED_Display_1.12inch.md
@@ -112,7 +112,7 @@ This is an easy-to-use module, what you need to do is connect the module to I2C
- **Step 4.** Upload the demo code below in your Arduino IDE.
-```C++
+```cpp
#include
#include
#include
diff --git a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-Triple_Color_E-Ink_Display_1_54.md b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-Triple_Color_E-Ink_Display_1_54.md
index 8ba07d92ce87..6f122b9f7aa8 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-Triple_Color_E-Ink_Display_1_54.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-Triple_Color_E-Ink_Display_1_54.md
@@ -174,7 +174,7 @@ It will be a lot fun to display your own image, now, let's show you how to DIY y
Before the start, please check the **E_ink154_factoryCode.ino** again. You can find the two array easily.
-```c++
+```cpp
const unsigned char IMAGE_BLACK[] PROGMEM = { /* 0X00,0X01,0XC8,0X00,0XC8,0X00, */
0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,
0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,
@@ -190,7 +190,7 @@ const unsigned char IMAGE_BLACK[] PROGMEM = { /* 0X00,0X01,0XC8,0X00,0XC8,0X00,
and
-```c++
+```cpp
const unsigned char IMAGE_RED[] PROGMEM = { /* 0X00,0X01,0XC8,0X00,0XC8,0X00, */
0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,
0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,
diff --git a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-Triple_Color_E-Ink_Display_2_13.md b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-Triple_Color_E-Ink_Display_2_13.md
index 07a08d8f4b48..a6ad5cd874a2 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Display/Grove-Triple_Color_E-Ink_Display_2_13.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Display/Grove-Triple_Color_E-Ink_Display_2_13.md
@@ -175,7 +175,7 @@ It will be a lot fun to display your own image, now, let's show you how to DIY y
Before the start, please check the **Eink_factory_code_213.ino** again. You can find the two array easily.
-```c++
+```cpp
const unsigned char IMAGE_BLACK[] PROGMEM = { /* 0X00,0X01,0XC8,0X00,0XC8,0X00, */
0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,
0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,
@@ -191,7 +191,7 @@ const unsigned char IMAGE_BLACK[] PROGMEM = { /* 0X00,0X01,0XC8,0X00,0XC8,0X00,
and
-```c++
+```cpp
const unsigned char IMAGE_RED[] PROGMEM = { /* 0X00,0X01,0XC8,0X00,0XC8,0X00, */
0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,
0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,
diff --git a/docs/Sensor/Grove/Grove_Accessories/Input_Output/Grove-8-Channel-I2C-Multiplexer-I2C-Hub-TCA9548A.md b/docs/Sensor/Grove/Grove_Accessories/Input_Output/Grove-8-Channel-I2C-Multiplexer-I2C-Hub-TCA9548A.md
index 55447b6ced91..d985c07b0da1 100755
--- a/docs/Sensor/Grove/Grove_Accessories/Input_Output/Grove-8-Channel-I2C-Multiplexer-I2C-Hub-TCA9548A.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Input_Output/Grove-8-Channel-I2C-Multiplexer-I2C-Hub-TCA9548A.md
@@ -54,7 +54,7 @@ Connect the I2C Hub with Seeeduino XIAO's I2C interface, and connect each I2C de
#### Software code
-```C++
+```cpp
#include "TCA9548A.h"
// if you use the software I2C to drive, you can uncommnet the define SOFTWAREWIRE which in TCA9548A.h.
diff --git a/docs/Sensor/Grove/Grove_Accessories/Input_Output/Grove-Differential_Amplifier_v1.0.md b/docs/Sensor/Grove/Grove_Accessories/Input_Output/Grove-Differential_Amplifier_v1.0.md
index 96f5a616ce5e..c8c7ad43ef5b 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Input_Output/Grove-Differential_Amplifier_v1.0.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Input_Output/Grove-Differential_Amplifier_v1.0.md
@@ -159,7 +159,7 @@ Connect the weight sensor to the amplifier as the picture depicts below.
Copy and paste the demo code below to Arduino IDE and upload it.
-```c++
+```cpp
void setup()
{
Serial.begin(9600);
diff --git a/docs/Sensor/Grove/Grove_Accessories/Input_Output/Grove-RS485.md b/docs/Sensor/Grove/Grove_Accessories/Input_Output/Grove-RS485.md
index 95f256e1c792..00563dd747c4 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Input_Output/Grove-RS485.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Input_Output/Grove-RS485.md
@@ -92,7 +92,7 @@ The Grove - NFC supports I2C and UART, [Seeed Arduino NFC Library](https://githu
- **Step 1.** Open two Arduino IDE windows and copy these codes as below separately. One of the device is using as master device and the other one is using as slave device.
-```c++
+```cpp
/* Slave */
#include
SoftwareSerial Slave(6, 7);
@@ -117,7 +117,7 @@ void loop() {
}
```
-```c++
+```cpp
/* Master */
#include
SoftwareSerial Master(6, 7);
diff --git a/docs/Sensor/Grove/Grove_Accessories/LED/Grove-LED_Matrix_Driver-HT16K33.md b/docs/Sensor/Grove/Grove_Accessories/LED/Grove-LED_Matrix_Driver-HT16K33.md
index 7337397be3a3..2081fc76cc7a 100644
--- a/docs/Sensor/Grove/Grove_Accessories/LED/Grove-LED_Matrix_Driver-HT16K33.md
+++ b/docs/Sensor/Grove/Grove_Accessories/LED/Grove-LED_Matrix_Driver-HT16K33.md
@@ -159,7 +159,7 @@ For example, if I want to change the address to 0x73, I need to connect pad A1,A
-```C++
+```cpp
#include
@@ -222,7 +222,7 @@ Are you willing to let the LED matrix to display the emoji? Now, it is your turn
- **Step 5.** Create the new '.ino' file under the same folder with other LED Matrix examples and copy below code.
-```C++
+```cpp
#include "Grove_LED_Matrix_Driver_HT16K33.h"
#include
diff --git a/docs/Sensor/Grove/Grove_Accessories/LED/Grove-LED_ring.md b/docs/Sensor/Grove/Grove_Accessories/LED/Grove-LED_ring.md
index a05a452598f0..ef01b5a1ede7 100644
--- a/docs/Sensor/Grove/Grove_Accessories/LED/Grove-LED_ring.md
+++ b/docs/Sensor/Grove/Grove_Accessories/LED/Grove-LED_ring.md
@@ -167,7 +167,7 @@ Now, we will demonstrate you how to run the code 'buttoncycler'. This is a demon
#### buttoncycler
After run this code, when you press the button it will change to a new pixel animation. Note that you need to press the button once to start the first animation!
-```C++
+```cpp
#include "Adafruit_NeoPixel.h"
@@ -344,7 +344,7 @@ uint32_t Wheel(byte WheelPos) {
**RGBW strand test**
-```C++
+```cpp
#include "Adafruit_NeoPixel.h"
#ifdef __AVR__
@@ -613,7 +613,7 @@ uint8_t blue(uint32_t c) {
**Simple**
-```C++
+```cpp
#include "Adafruit_NeoPixel.h"
#ifdef __AVR__
@@ -665,7 +665,7 @@ void loop() {
**Simple New Operator**
-```C++
+```cpp
#include "Adafruit_NeoPixel.h"
#ifdef __AVR__
@@ -723,7 +723,7 @@ void loop() {
**Strand test**
-```C++
+```cpp
#include "Adafruit_NeoPixel.h"
#ifdef __AVR__
diff --git a/docs/Sensor/Grove/Grove_Accessories/LED/Grove-RGB_LED_Matrix_w-Driver.md b/docs/Sensor/Grove/Grove_Accessories/LED/Grove-RGB_LED_Matrix_w-Driver.md
index 4648d9b5685d..d5ca4a15c44f 100644
--- a/docs/Sensor/Grove/Grove_Accessories/LED/Grove-RGB_LED_Matrix_w-Driver.md
+++ b/docs/Sensor/Grove/Grove_Accessories/LED/Grove-RGB_LED_Matrix_w-Driver.md
@@ -222,7 +222,7 @@ e.g.
in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```C++
+```cpp
#include "grove_two_rgb_led_matrix.h"
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
@@ -339,7 +339,7 @@ Let's begin DIY.
-```C++
+```cpp
#include "grove_two_rgb_led_matrix.h"
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
diff --git a/docs/Sensor/Grove/Grove_Accessories/LED/Grove-RGB_LED_Stick-10-WS2813_Mini.md b/docs/Sensor/Grove/Grove_Accessories/LED/Grove-RGB_LED_Stick-10-WS2813_Mini.md
index 7686770a476e..8285af517616 100644
--- a/docs/Sensor/Grove/Grove_Accessories/LED/Grove-RGB_LED_Stick-10-WS2813_Mini.md
+++ b/docs/Sensor/Grove/Grove_Accessories/LED/Grove-RGB_LED_Stick-10-WS2813_Mini.md
@@ -168,7 +168,7 @@ As long as not two or more adjacent LEDs are broken, the remaining LEDs will be
in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```C++
+```cpp
// NeoPixel Ring simple sketch (c) 2013 Shae Erisson
// released under the GPLv3 license to match the rest of the AdaFruit NeoPixel library
diff --git a/docs/Sensor/Grove/Grove_Accessories/LED/Grove-Red_LED_Matrix_w_Driver.md b/docs/Sensor/Grove/Grove_Accessories/LED/Grove-Red_LED_Matrix_w_Driver.md
index ee29f00ec983..6ce84e11f4f6 100644
--- a/docs/Sensor/Grove/Grove_Accessories/LED/Grove-Red_LED_Matrix_w_Driver.md
+++ b/docs/Sensor/Grove/Grove_Accessories/LED/Grove-Red_LED_Matrix_w_Driver.md
@@ -158,7 +158,7 @@ For example, if I want to change the address to 0x73, I need to connect pad A1,A
-```C++
+```cpp
#include
@@ -221,7 +221,7 @@ Are you willing to let the LED matrix to display the emoji? Now, it is your turn
- **Step 5.** Create the new '.ino' file under the same folder with other LED Matrix examples and copy below code.
-```C++
+```cpp
#include "Grove_LED_Matrix_Driver_HT16K33.h"
#include
diff --git a/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-5-Way_Switch.md b/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-5-Way_Switch.md
index 32e23285ae61..6e09a0c6d822 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-5-Way_Switch.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-5-Way_Switch.md
@@ -130,7 +130,7 @@ If this is the first time you work with Arduino, we strongly recommend you to se
Or, you can just click the icon  in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```C++
+```cpp
#include "Grove_Multi_Switch.h"
GroveMultiSwitch mswitch[1];
@@ -262,7 +262,7 @@ void loop()
If every thing goes well, you will get the result. When you press the **KEY E**, it will trigger **KEY E: RAW - LOW PRESSED**
:::
-```C++
+```cpp
Grove Multi Switch
***** Device probe Device BN-5E-0.1
Grove Multi Switch
diff --git a/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-6-Position_DIP_Switch.md b/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-6-Position_DIP_Switch.md
index 16f587a3644a..9882fa39d734 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-6-Position_DIP_Switch.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-6-Position_DIP_Switch.md
@@ -118,7 +118,7 @@ If this is the first time you work with Arduino, we strongly recommend you to se
Or, you can just click the icon  in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```C++
+```cpp
#include "Grove_Multi_Switch.h"
GroveMultiSwitch mswitch[1];
@@ -250,7 +250,7 @@ void loop()
If every thing goes well, you will get the result. For instance, the default switch is off-High, when you turn the **Switch6** to **ON**, the output will be **POS 6: RAW - LOW ON**.
:::
-```C++
+```cpp
Grove Multi Switch
***** Device probe OK *****
Grove 6-Position DIP Switch Inserted!
diff --git a/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-Dual-Button.md b/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-Dual-Button.md
index 3ffe1d2b58ed..079a6f34357e 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-Dual-Button.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-Dual-Button.md
@@ -70,7 +70,7 @@ interface.
- **Step1** Copy the code below to the Arduino IDE and upload. If you do not know how to update the code, please check [How to upload code](https://wiki.seeedstudio.com/Upload_Code/).
-```c++
+```cpp
//set the corresponding notes with frequency
#define NOTE_D0 0
#define NOTE_D1 294
diff --git a/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-LED_Button.md b/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-LED_Button.md
index ce3c6682f151..5413a5c64648 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-LED_Button.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-LED_Button.md
@@ -135,7 +135,7 @@ If this is the first time you work with Arduino, we strongly recommend you to se
- **Step 1.** Open the Arduino IDE and create a new file, then copy the following code into the new file.
-```C++
+```cpp
#include "Arduino.h"
//1: toggle mode, 2: follow mode
diff --git a/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-Mech_Keycap.md b/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-Mech_Keycap.md
index 3e09bd910d95..fe127759736b 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-Mech_Keycap.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Switch&Button/Grove-Mech_Keycap.md
@@ -131,7 +131,7 @@ If we don't have Grove Base Shield, We also can directly connect Grove-Mech keyc
- **Step 3.** Open the Arduino IDE and create a new file, then copy the following code into the new file.
-```c++
+```cpp
/**
* This is an exmaple of the Grove - Mech Keycap.
* Every press of the key will change the color the SK6805 RGB LED. The SK6805 is a NeoPixel compatible chip.
diff --git a/docs/Sensor/Grove/Grove_Accessories/Time/Grove-RTC.md b/docs/Sensor/Grove/Grove_Accessories/Time/Grove-RTC.md
index 05bcd1a15a72..18422c81e961 100644
--- a/docs/Sensor/Grove/Grove_Accessories/Time/Grove-RTC.md
+++ b/docs/Sensor/Grove/Grove_Accessories/Time/Grove-RTC.md
@@ -95,7 +95,7 @@ If we don't have the base shield, we also can directly connect the Grove-RTC to

in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```C++
+```cpp
#include "BMA400.h"
@@ -254,7 +254,7 @@ void loop(void)
If every thing goes well, it may show as below:
:::
-```C++
+```cpp
BMA400 Raw Data
BMA400 is connected
85.94,357.42,916.02,23
diff --git a/docs/Sensor/Grove/Grove_Sensors/Accelerometer/Grove-6-Axis_Accelerometer&Gyroscope_BMI088.md b/docs/Sensor/Grove/Grove_Sensors/Accelerometer/Grove-6-Axis_Accelerometer&Gyroscope_BMI088.md
index 3c5c46242d16..cac1a65ffe8a 100644
--- a/docs/Sensor/Grove/Grove_Sensors/Accelerometer/Grove-6-Axis_Accelerometer&Gyroscope_BMI088.md
+++ b/docs/Sensor/Grove/Grove_Sensors/Accelerometer/Grove-6-Axis_Accelerometer&Gyroscope_BMI088.md
@@ -145,7 +145,7 @@ This is a typical Bi-directional level shifter circuit to connect two different
in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```C++
+```cpp
#include "BMI088.h"
@@ -215,7 +215,7 @@ void loop(void)
If every thing goes well, when you open the Serial Monitor, it may show as below:
:::
-```c++
+```cpp
BMI088 Raw Data
BMI088 is connected
394.41,-383.06,818.66,1.71,-4.88,-2.93,27
diff --git a/docs/Sensor/Grove/Grove_Sensors/Accelerometer/Grove-IMU_10DOF.md b/docs/Sensor/Grove/Grove_Sensors/Accelerometer/Grove-IMU_10DOF.md
index 168b68145bd8..59b6dbf6c093 100644
--- a/docs/Sensor/Grove/Grove_Sensors/Accelerometer/Grove-IMU_10DOF.md
+++ b/docs/Sensor/Grove/Grove_Sensors/Accelerometer/Grove-IMU_10DOF.md
@@ -113,7 +113,7 @@ We will provide an example here to show you how to use this sensor.
Here is a part of the code:
-```c++
+```cpp
void setup()
{
diff --git a/docs/Sensor/Grove/Grove_Sensors/Accelerometer/Grove-IMU_9DOF-lcm20600+AK09918.md b/docs/Sensor/Grove/Grove_Sensors/Accelerometer/Grove-IMU_9DOF-lcm20600+AK09918.md
index 60ffcd7057d7..a195c1502b3f 100644
--- a/docs/Sensor/Grove/Grove_Sensors/Accelerometer/Grove-IMU_9DOF-lcm20600+AK09918.md
+++ b/docs/Sensor/Grove/Grove_Sensors/Accelerometer/Grove-IMU_9DOF-lcm20600+AK09918.md
@@ -187,7 +187,7 @@ This is a typical Bi-directional level shifter circuit to connect two different
in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```C++
+```cpp
#include "AK09918.h"
#include "ICM20600.h"
#include
@@ -389,7 +389,7 @@ void calibrate(uint32_t timeout, int32_t *offsetx, int32_t *offsety, int32_t*off
If every thing goes well, when you open the Serial Monitor, the notice will pop up--*Start figure-8 calibration after 2 seconds.* Which means in order to calibrate this module, you should move it and draw the number 8 trajectory in the air. When the "......." appears, you can start your calibration.
:::
-```C++
+```cpp
Start figure-8 calibration after 2 seconds.
.......................................................................
A: -362, -205, 738 mg
diff --git a/docs/Sensor/Grove/Grove_Sensors/Accelerometer/Grove-IMU_9DOF_v2.0.md b/docs/Sensor/Grove/Grove_Sensors/Accelerometer/Grove-IMU_9DOF_v2.0.md
index 4b1e04fa17b1..4fe04fb4959c 100644
--- a/docs/Sensor/Grove/Grove_Sensors/Accelerometer/Grove-IMU_9DOF_v2.0.md
+++ b/docs/Sensor/Grove/Grove_Sensors/Accelerometer/Grove-IMU_9DOF_v2.0.md
@@ -113,7 +113,7 @@ Grove - IMU 9DOF v2.0 is an upgraded version of **Grove - IMU 9DOF v1.0** and it
Here is the main part of the code
-```c++
+```cpp
void setup() {
// join I2C bus (I2Cdev library doesn't do this automatically)
diff --git a/docs/Sensor/Grove/Grove_Sensors/Air_Quality/Grove-Laser_PM2.5_Sensor-HM3301.md b/docs/Sensor/Grove/Grove_Sensors/Air_Quality/Grove-Laser_PM2.5_Sensor-HM3301.md
index c869f60d4a82..ee0bf2ef3ca2 100644
--- a/docs/Sensor/Grove/Grove_Sensors/Air_Quality/Grove-Laser_PM2.5_Sensor-HM3301.md
+++ b/docs/Sensor/Grove/Grove_Sensors/Air_Quality/Grove-Laser_PM2.5_Sensor-HM3301.md
@@ -135,7 +135,7 @@ If this is the first time you work with Arduino, we strongly recommend you to se
3. Or, you can just click the icon  in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```C++
+```cpp
#include "Seeed_HM330X.h"
diff --git a/docs/Sensor/Grove/Grove_Sensors/All_in_one/Grove-CO2_Temperature_Humidity_Sensor-SCD30.md b/docs/Sensor/Grove/Grove_Sensors/All_in_one/Grove-CO2_Temperature_Humidity_Sensor-SCD30.md
index bf5385008fab..7c75d73781bb 100644
--- a/docs/Sensor/Grove/Grove_Sensors/All_in_one/Grove-CO2_Temperature_Humidity_Sensor-SCD30.md
+++ b/docs/Sensor/Grove/Grove_Sensors/All_in_one/Grove-CO2_Temperature_Humidity_Sensor-SCD30.md
@@ -182,7 +182,7 @@ SenseCAP S210x series industrial sensors provide an out-of-box experience for en
c. Or, you can just click the icon  in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```C++
+```cpp
#include "SCD30.h"
#if defined(ARDUINO_ARCH_AVR)
diff --git a/docs/Sensor/Grove/Grove_Sensors/All_in_one/Grove-Light-Gesture-Color-Proximity_Sensor-TMG39931.md b/docs/Sensor/Grove/Grove_Sensors/All_in_one/Grove-Light-Gesture-Color-Proximity_Sensor-TMG39931.md
index da45f83c2da8..a8e3e39a9d80 100644
--- a/docs/Sensor/Grove/Grove_Sensors/All_in_one/Grove-Light-Gesture-Color-Proximity_Sensor-TMG39931.md
+++ b/docs/Sensor/Grove/Grove_Sensors/All_in_one/Grove-Light-Gesture-Color-Proximity_Sensor-TMG39931.md
@@ -140,7 +140,7 @@ The gesture functionality is not supported yet, since this functionality needs a
3. Or, you can just click the icon  in upper right corner of the code block to copy the following code into a new sketch in the Arduino IDE.
-```C++
+```cpp
#include
#include "Seeed_TMG3993.h"
@@ -201,7 +201,7 @@ Two thresholds need to be configured - low and high. Any proximity value which i
- **Step 3.** Restart the Arduino IDE. Open the example, the same way as in Example 1, but this time choose "Example2-ProximityInterrupt" instead of "Example1". Or copy the following code into Arduino IDE:
-```C++
+```cpp
#include
@@ -272,7 +272,7 @@ This example reads the R, G, B, C sensor values. C is defined as the non-color f
- **Step 3.** Restart the Arduino IDE. Open the example, the same way as in Example 1, but this time choose "Example3-Color-Light" instead of "Example1". Or copy the following code into Arduino IDE:
-```C++
+```cpp
#include
diff --git a/docs/Sensor/Grove/Grove_Sensors/All_in_one/Grove_SEN5X_All_in_One.md b/docs/Sensor/Grove/Grove_Sensors/All_in_one/Grove_SEN5X_All_in_One.md
index 75a13eb0cea2..47dee32a6f75 100644
--- a/docs/Sensor/Grove/Grove_Sensors/All_in_one/Grove_SEN5X_All_in_One.md
+++ b/docs/Sensor/Grove/Grove_Sensors/All_in_one/Grove_SEN5X_All_in_One.md
@@ -95,7 +95,7 @@ This demo can detect 4 types of PM (particulate matter), VOC (Volatile Organi
|||
+
## Introduction
The Seeed Studio XIAO ESP32C6 is a powerful and versatile development board built around the ESP32-C6 SoC, featuring dual 32-bit **RISC-V** processors. The high-performance processor operates up to 160 MHz, while the low-power processor runs up to 20 MHz. With 512KB SRAM and 4MB Flash, the XIAO ESP32C6 offers significant programming space, making it ideal for various IoT applications. This board excels in wireless connectivity, supporting 2.4 GHz Wi-Fi 6, Bluetooth® 5.3, Zigbee, and Thread (802.15.4), and is Matter-native, which is crucial for smart-home interoperability.
diff --git a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_ESP32C6/XIAO_ESP32C6_Getting_Started.md b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_ESP32C6/XIAO_ESP32C6_Getting_Started.md
index 103fa22a9ccf..66fa32ff242c 100644
--- a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_ESP32C6/XIAO_ESP32C6_Getting_Started.md
+++ b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_ESP32C6/XIAO_ESP32C6_Getting_Started.md
@@ -10,7 +10,7 @@ slug: /xiao_esp32c6_getting_started
toc_max_heading_level: 4
sidebar_position: 1
last_update:
- date: 04/02/2024
+ date: 07/16/2024
author: Spencer
---
@@ -316,6 +316,21 @@ If you want to connect the battery for XIAO, we recommend you to purchase qualif
When you use battery power, there will be no voltage on the 5V pin.
:::
+:::tip red indicator light
+
+At the same time, we have the red indicator light for battery charging as [XIAO ESP32S3](/xiao_esp32s3_getting_started/#battery-usage):
+
+The red light behavior for the XIAO ESP32 C6 is as follows:
+
+- When the XIAO ESP32 C6 is not connected to a battery:
+ - The red light comes on when the Type-C cable is connected and goes off after 30 seconds.
+- When the battery is connected and the Type-C cable is connected for charging:
+ - The red light flashes.
+- When the battery is fully charged via the Type-C connection:
+ - The red light turns off.
+
+:::
+
## Deep sleep mode and wake-up
The XIAO ESP32C6 has a complete deep sleep mode and wake-up function. Here we will show two of the more common examples offered by the ESP.
diff --git a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_Expansion_board/Seeeduino-XIAO-Expansion-Board.md b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_Expansion_board/Seeeduino-XIAO-Expansion-Board.md
index d43781ede324..4970e07461da 100644
--- a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_Expansion_board/Seeeduino-XIAO-Expansion-Board.md
+++ b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_Expansion_board/Seeeduino-XIAO-Expansion-Board.md
@@ -159,7 +159,7 @@ This example introduces how to use the OLED display on the Seeed Studio Expansio
**OLED Code**
-```CPP
+```cpp
#include
#include
#include
@@ -190,7 +190,7 @@ This example introduces how to use the button on the Seeed Studio Expansion Base
**Code**
-```CPP
+```cpp
const int buttonPin = 1; // the number of the pushbutton pin
int buttonState = 0; // variable for reading the pushbutton status
@@ -234,7 +234,7 @@ This example uses Buzzer on the Seeed Studio Expansion Base for XIAO to play Hap
**Code**
-```CPP
+```cpp
int speakerPin = D3;
int length = 28; // the number of notes
char notes[] = "GGAGcB GGAGdc GGxecBA yyecdc";
@@ -303,7 +303,7 @@ This example uses a rotary angle sensor to control servo via integration ports o
If your Development Board is **XIAO ESP32 Series**. Before you run the following code, you need to install ESP32Servo library first in **Arduino Library Manager** and change the following code from ```#include ``` to ```#include ```.
:::
-```CPP
+```cpp
#include
#include
#include
@@ -349,7 +349,7 @@ This example uses RTC to display the clock on the OLED.
**Step 3**. Copy the code and stick on the Ardiono IDE then upload it.
-```CPP
+```cpp
#include
#include
#include
@@ -639,7 +639,7 @@ The MicroSD card system format is FAT or exFAT. If you use other MicroSD card sy
**The `main.py` code**
-```CPP
+```cpp
import sd
f = open("/sd/hello.txt", "r") ## read the file from SD card
print(f.read())
@@ -649,7 +649,7 @@ print(f.read())
**The `sd.py` code**
-```CPP
+```cpp
import os
import adafruit_sdcard
import board
@@ -731,7 +731,7 @@ Please follow the same color line to connect each sensor on the board. Please co
**Code**
-```CPP
+```cpp
#include
#include
@@ -849,7 +849,7 @@ Please follow the same color line to connect each sensor on the board. Please co
**Code**
-```CPP
+```cpp
#include
#include
#include
@@ -995,7 +995,7 @@ If other people put their finger on it, the LED ring will turn to red colour and
**Code**
-```C
+```cpp
#include
#include
#include
@@ -1183,7 +1183,7 @@ Please connect the expansion board and the required modules with Grove wire, con
**Code**
-```C
+```cpp
#include
#include "ATSerial.h"
#include "Protocol.h"
@@ -1310,7 +1310,7 @@ Please connect each sensor as shown in the diagram. Connect the CO2 sensor and P
**Code**
-```C
+```cpp
#include
#include
#include
@@ -1536,7 +1536,7 @@ As shown in the figure below, connect the heart rate sensor to the I2C interface
**Code**
-```C
+```cpp
#include
#include
@@ -1584,6 +1584,10 @@ void loop() {
- **[SCH]**[**Seeed Studio Expansion Base for XIAO_v1.0_200824**](https://files.seeedstudio.com/wiki/Seeeduino-XIAO-Expansion-Board/document/Seeeduino%20XIAO%20Expansion%20board_v1.0_200824.sch)
- **[BRD]**[**Seeed Studio Expansion Base for XIAO_v1.0_200824**](https://files.seeedstudio.com/wiki/Seeeduino-XIAO-Expansion-Board/document/Seeeduino%20XIAO%20Expansion%20board_v1.0_200824.brd)
+## FAQ
+
+### Q1: Does the PMIC on the XIAO Expansion board output power on the 5V pins? If so, how much current can we draw?
+
## Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
diff --git a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/Embedded ML/XIAO-RP2040-EI.md b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/Embedded ML/XIAO-RP2040-EI.md
index cb1ed7cc3ac3..c820e4f1858e 100644
--- a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/Embedded ML/XIAO-RP2040-EI.md
+++ b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/Embedded ML/XIAO-RP2040-EI.md
@@ -48,7 +48,7 @@ Open the Arduino IDE, navigate to Sketch -> Include Library -> Manage Libraries.
After the installation, copy the following code run it.
-```c++
+```cpp
#include
#include "MMA7660.h"
MMA7660 accelemeter;
diff --git a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-with-Arduino.md b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-with-Arduino.md
index 598457f6c55f..9eee9e902253 100644
--- a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-with-Arduino.md
+++ b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-with-Arduino.md
@@ -108,7 +108,7 @@ Connect a pushbutton to Pin D0 and an LED to Pin 25. Then upload the following c
Please note that the operating voltage of the Seeed Studio XIAO RP2040 is 3.3V, if you connect the sensor to 5V incorrectly, the motherboard may not work properly.
:::
-```c++
+```cpp
const int buttonPin = D0; // the number of the pushbutton pin
const int ledPin = 25; // the number of the LED pin
@@ -140,7 +140,7 @@ void loop() {
Connect a potentiometer to Pin A0 and an LED to Pin 25. Then upload the following code to control the blinking interval of the LED by rotating the potentiometer knob.
-```c++
+```cpp
const int sensorPin = A0;
const int ledPin = 25;
void setup() {
@@ -167,7 +167,7 @@ int sensorValue = analogRead(sensorPin);
Use pin D6 as the TX pin of UART and pin D7 as RX pin of UART to send the "Hello World!" message
-```c++
+```cpp
void setup() {
Serial.begin(115200);
while (!Serial);
@@ -193,7 +193,7 @@ Type the keyword "Adafruit_NeoPixel" library in Ardunio library Manager and inst
- **Step 2.** Copy the codes to Arduino and click the **Upload** button to upload.
-```c++
+```cpp
#include
int Power = 11;
@@ -257,7 +257,7 @@ Type the keyword "U8G2" library in Ardunio library Manager and install the laste
- **Step 2.** Copy the codes to Arduino and click the **Upload** button to upload.
-```c++
+```cpp
#include
#include
@@ -314,7 +314,7 @@ Type the keyword "Adafruit_SSD1306" library in Ardunio library Manager and insta
- **Step 2.** Copy the codes to Arduino and click the **Upload** button to upload.
-```c++
+```cpp
#include
#include
#include
diff --git a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-with-CircuitPython.md b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-with-CircuitPython.md
index bc52375f3cc2..d3782e2bdac6 100644
--- a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-with-CircuitPython.md
+++ b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-with-CircuitPython.md
@@ -58,7 +58,7 @@ Now you have successfully installed the CircuitPython to the Seeed Studio XIAO R
**Step 3** Copy and upload the following codes:
-```c++
+```cpp
"""Example for Pico. Blinks the built-in LED."""
import time
import board
diff --git a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-with-MicroPython.md b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-with-MicroPython.md
index a848885763f4..93ddb6bf2d03 100644
--- a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-with-MicroPython.md
+++ b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-with-MicroPython.md
@@ -64,7 +64,7 @@ Click on the Install button and close this page when the installation status say
- **Step 3**. Copy the following codes to Thonny.
-```c++
+```cpp
from machine import Pin, Timer
led = Pin(25, Pin.OUT)
diff --git a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_SAMD21/TuTorial/How-to-use-Seeeduino-XIAO-to-log-in-to-your-Raspberry-PI.md b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_SAMD21/TuTorial/How-to-use-Seeeduino-XIAO-to-log-in-to-your-Raspberry-PI.md
index 3ec2a496823e..eb79da2b34f0 100644
--- a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_SAMD21/TuTorial/How-to-use-Seeeduino-XIAO-to-log-in-to-your-Raspberry-PI.md
+++ b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_SAMD21/TuTorial/How-to-use-Seeeduino-XIAO-to-log-in-to-your-Raspberry-PI.md
@@ -55,7 +55,7 @@ enable_uart=1
- **Step 2.** Copy the following code to Arduino IDE and upload the code into Seeed Studio XIAO SAMD21.
-```c++
+```cpp
uint32_t baud;
uint32_t old_baud;
void setup() {
diff --git a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_nRF52840-Sense/Bluetooth Libraries/XIAO-BLE-Sense-Bluetooth-Usage.md b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_nRF52840-Sense/Bluetooth Libraries/XIAO-BLE-Sense-Bluetooth-Usage.md
index 92a603c34c80..c0c5b7d7e6d4 100644
--- a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_nRF52840-Sense/Bluetooth Libraries/XIAO-BLE-Sense-Bluetooth-Usage.md
+++ b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_nRF52840-Sense/Bluetooth Libraries/XIAO-BLE-Sense-Bluetooth-Usage.md
@@ -88,7 +88,7 @@ In this example, we are going to connect the Seeed Studio XIAO nF52840 (Sense) a
Please paste this code below into the Arduino IDE and upload it to the Seeed Studio XIAO nRF52840.
-```c++
+```cpp
#include
BLEService ledService("19B10000-E8F2-537E-4F6C-D104768A1214"); // Bluetooth® Low Energy LED Service
@@ -163,7 +163,7 @@ void loop() {
The key to the implementation of this example is the following paragraph.
-```c++
+```cpp
while (central.connected()) {
if (switchCharacteristic.written()) {
if (switchCharacteristic.value()) {
@@ -228,7 +228,7 @@ Please open the example code in the library and upload it to Seeed Studio XIAO n
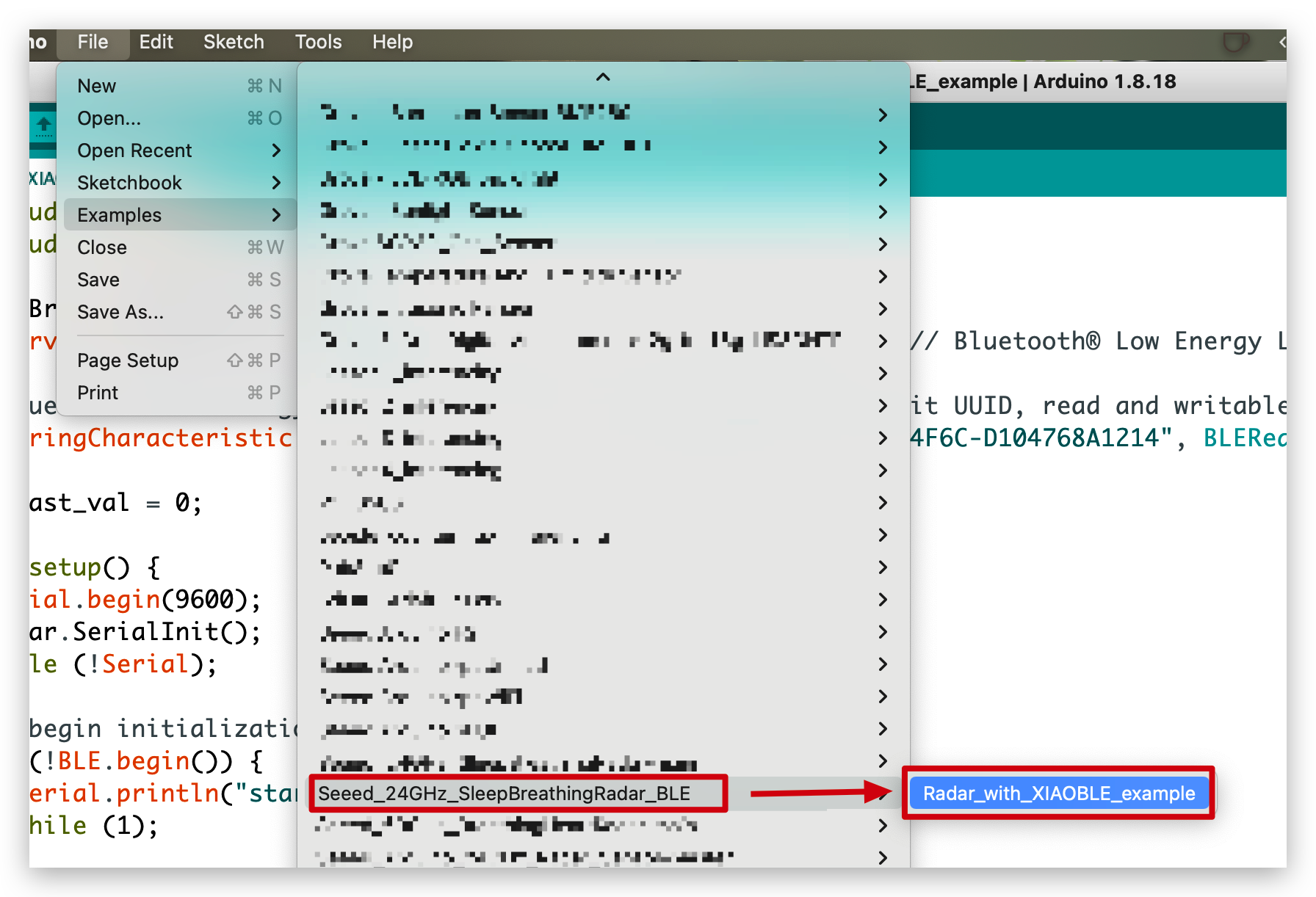
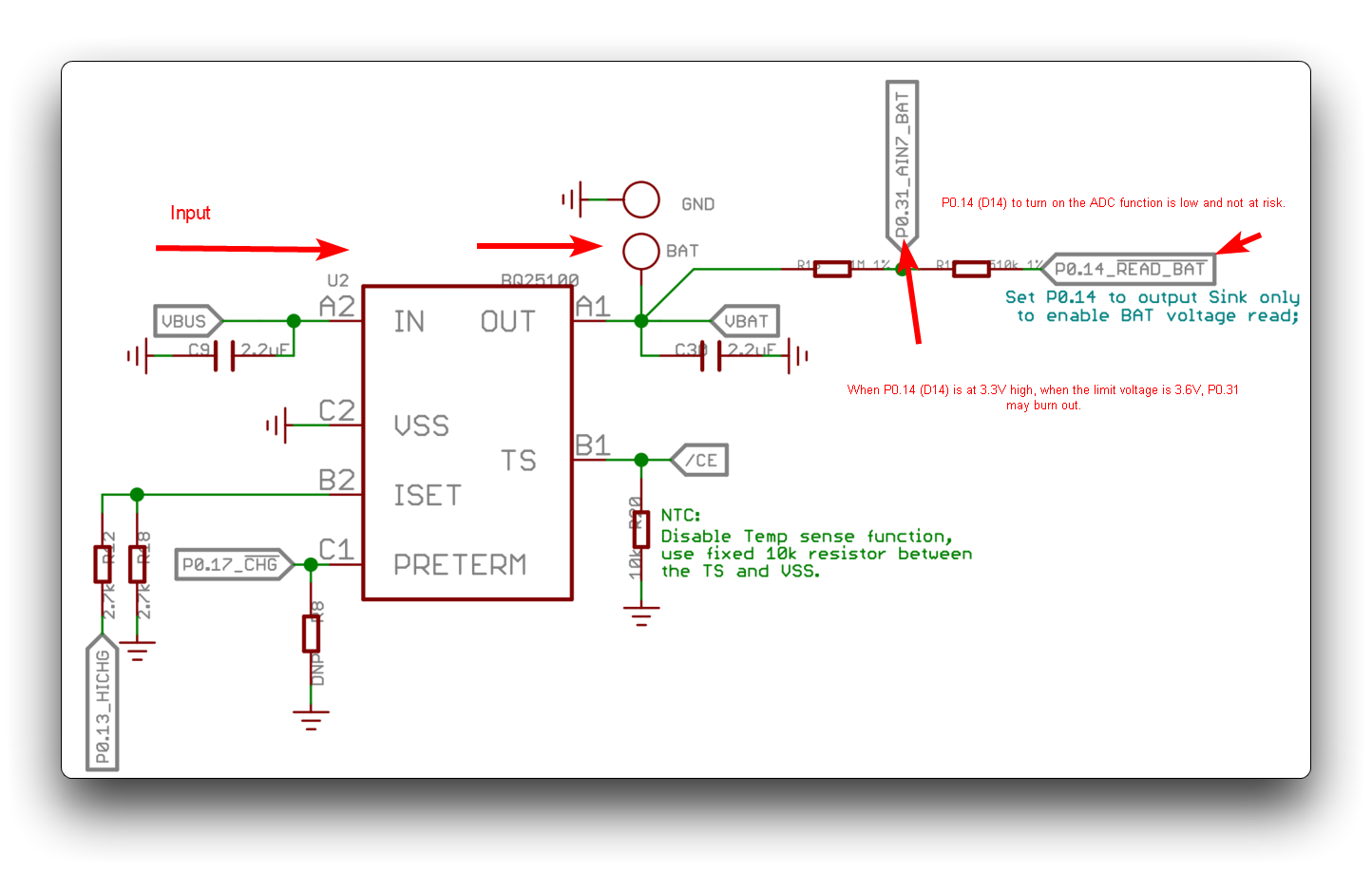
+### Q4: How does the red light behave when powered on?
+
+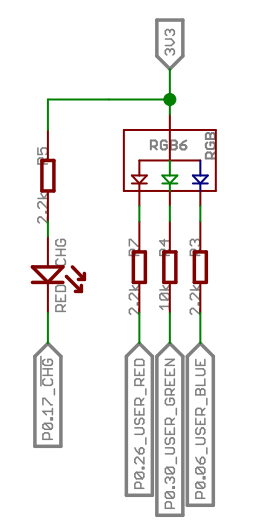
+
+The `P0.17` pin is used to control the red indicator light behavior, indicating the charging status:
+
+- Low level: when **charging** is in progress.
+- High level: when the battery is either **not charging** or **fully charged**.
+
+When it is at a low level, the `RED_CHG` LED will light up.
+
+For more details, check the PMIC datasheet: [BQ25100](https://www.ti.com/lit/ds/symlink/bq25100a.pdf) and [XIAO nRF52840 datasheet](https://files.seeedstudio.com/wiki/XIAO-BLE/nRF52840_PS_v1.5.pdf).
+
## Resources
### Seeed Studio XIAO nRF52840
diff --git a/docs/Sensor/Seeeduino Series/Seeeduino/Seeeduino_v4.0.md b/docs/Sensor/Seeeduino Series/Seeeduino/Seeeduino_v4.0.md
index 1592765f493f..e490883441b1 100644
--- a/docs/Sensor/Seeeduino Series/Seeeduino/Seeeduino_v4.0.md
+++ b/docs/Sensor/Seeeduino Series/Seeeduino/Seeeduino_v4.0.md
@@ -265,7 +265,7 @@ Connect your ESP8266 WiFi module to the Seeeduino board as follows (See the phot
**2.** Open the Arduino IDE
**3.** Upload a blank program to your board, or make sure that the program it has does not user any Serial functions.
-```C++
+```cpp
void setup()
{
diff --git a/docs/Sensor/Seeeduino Series/Seeeduino_LoRAWAN.md b/docs/Sensor/Seeeduino Series/Seeeduino_LoRAWAN.md
index 314e5b43a755..159528ddfafd 100644
--- a/docs/Sensor/Seeeduino Series/Seeeduino_LoRAWAN.md
+++ b/docs/Sensor/Seeeduino Series/Seeeduino_LoRAWAN.md
@@ -237,7 +237,7 @@ Charge status pin and positive pin of the battery had beed connect to A4 and A5,
Copy and upload the below code to detect the battery status.
-```c++
+```cpp
// battey of Seeeduino LoRaWAN
const int pin_battery_status = A5;
@@ -356,7 +356,7 @@ After both of the sketch is well uploaded, open the serial monitor of the receiv
* Step 4. Download [DHT Library](https://files.seeedstudio.com/wiki/Seeeduino_LoRa/res/DHT.zip) and unzip to arduino library folder.
* Step 5. Copy below code to arduino IDE and upload.
-```c++
+```cpp
#include
#include "DHT.h"
@@ -450,7 +450,7 @@ void loop(void)
* Step 1. Please refer to [User Manual](https://files.seeedstudio.com/wiki/LoRaWAN_Gateway-868MHz_Kit_with_Raspberry_Pi_3/res/RHF-UM01649-IoT-Discovery-User-Manual-seeed-v2.1.pdf) Session 3.2.3 to setup the gateway.
* Step 2. For seeeduino Lorawan, Please open your Arduino IDE and click on **File > Examples > LoRaWAN > OTAA** and refer the code.
-```c++
+```cpp
#include
@@ -537,7 +537,7 @@ void loop(void)
* Step 1. Copy below code you Seeeduino LoRaWAN W/GPS.
-```c++
+```cpp
void setup()
{
Serial2.begin(9600);
@@ -565,7 +565,7 @@ void loop()
Thanks for **Todd Krein** for sharing the example in Github. Please download the [TinyGPS++ library](https://files.seeedstudio.com/wiki/Seeeduino_LoRa/res/TinyGPSPlus-master.zip) and then copy below code to Seeeduino Lorawan.
-```c++
+```cpp
#define USE_GPS 1
#include "LoRaWan.h"
@@ -746,7 +746,7 @@ void dummy(void)
If you want to check version of you board, please upload below code to your board.
-```c++
+```cpp
void setup()
{
Serial1.begin(9600);
diff --git a/docs/Sensor/SenseCAP/SenseCAP_Indicator/Development_Tutorial/SenseCAP_Indicator_Arduino.md b/docs/Sensor/SenseCAP/SenseCAP_Indicator/Development_Tutorial/SenseCAP_Indicator_Arduino.md
index 9c6f3756bcf4..e9b60eda1dfe 100644
--- a/docs/Sensor/SenseCAP/SenseCAP_Indicator/Development_Tutorial/SenseCAP_Indicator_Arduino.md
+++ b/docs/Sensor/SenseCAP/SenseCAP_Indicator/Development_Tutorial/SenseCAP_Indicator_Arduino.md
@@ -8,6 +8,7 @@ slug: /SenseCAP_Indicator_ESP32_Arduino
last_update:
date: 9/24/2023
author: Hendra
+craft: true
---
# Develop SenseCAP Indicator both chips with Arduino
diff --git a/docs/Sensor/Wio_Series/Wio-E5/LoRa-E5_STM32WLE5JC_Module.md b/docs/Sensor/Wio_Series/Wio-E5/LoRa-E5_STM32WLE5JC_Module.md
index 111524a79d98..a4e16fb78fb2 100644
--- a/docs/Sensor/Wio_Series/Wio-E5/LoRa-E5_STM32WLE5JC_Module.md
+++ b/docs/Sensor/Wio_Series/Wio-E5/LoRa-E5_STM32WLE5JC_Module.md
@@ -558,7 +558,7 @@ Now we will modify our **Device EUI**, **Application EUI**, **Application KEY**
* **Step 7.** Please follow the [guide](https://wiki.seeedstudio.com/LoRa_E5_mini/#13-connect-and-send-data-to-the-things-network) here to setup your TTN application, get your **Application EUI** and copy it to the macro definition `LORAWAN_JOIN_EUI` in `LoRaWAN/App/se-identity.h` , for example, the Application EUI here is `80 00 00 00 00 00 00 0x07` :
-```C
+```cpp
// LoRaWAN/App/se-identity.h
/*!
@@ -569,7 +569,7 @@ Now we will modify our **Device EUI**, **Application EUI**, **Application KEY**
* **Step 8.** Also, you can modify your **Device EUI** and **Application Key**, by setting the macro definition `LORAWAN_DEVICE_EUI` and `LORAWAN_NWK_KEY` in `LoRaWAN/App/se-identity.h`. Make sure `LORAWAN_DEVICE_EUI` and `LORAWAN_NWK_KEY` are the same as the `Device EUI` and `App Key` in TTN console.
-```C
+```cpp
// LoRaWAN/App/se-identity.h
/*!
diff --git a/docs/Sensor/Wio_Series/Wio-E5/LoRa_E5_Dev_Board.md b/docs/Sensor/Wio_Series/Wio-E5/LoRa_E5_Dev_Board.md
index c0432a97a8c2..30c63f021918 100644
--- a/docs/Sensor/Wio_Series/Wio-E5/LoRa_E5_Dev_Board.md
+++ b/docs/Sensor/Wio_Series/Wio-E5/LoRa_E5_Dev_Board.md
@@ -441,7 +441,7 @@ Now we will modify our **Device EUI**, **Application EUI**, **Application KEY**
- **Step 7.** Please follow the [guide](https://wiki.seeedstudio.com/LoRa_E5_mini/#13-connect-and-send-data-to-the-things-network) here to setup your TTN application, get your **Application EUI** and copy it to the macro definition `LORAWAN_JOIN_EUI` in `LoRaWAN/App/se-identity.h` , for example, the Application EUI here is `80 00 00 00 00 00 00 0x07` :
-```C
+```cpp
// LoRaWAN/App/se-identity.h
/*!
@@ -452,7 +452,7 @@ Now we will modify our **Device EUI**, **Application EUI**, **Application KEY**
- **Step 8.** Also, you can modify your **Device EUI** and **Application Key**, by setting the macro definition `LORAWAN_DEVICE_EUI` and `LORAWAN_NWK_KEY` in `LoRaWAN/App/se-identity.h`. Make sure `LORAWAN_DEVICE_EUI` and `LORAWAN_NWK_KEY` are the same as the `Device EUI` and `App Key` in TTN console.
-```C
+```cpp
// LoRaWAN/App/se-identity.h
/*!
diff --git a/docs/Sensor/Wio_Series/Wio-E5/LoRa_E5_mini.md b/docs/Sensor/Wio_Series/Wio-E5/LoRa_E5_mini.md
index a71957c7f6bf..4a9880d49e77 100644
--- a/docs/Sensor/Wio_Series/Wio-E5/LoRa_E5_mini.md
+++ b/docs/Sensor/Wio_Series/Wio-E5/LoRa_E5_mini.md
@@ -446,7 +446,7 @@ Now we will modify our **Device EUI**, **Application EUI**, **Application KEY**
- **Step 7.** Please follow the [guide](https://wiki.seeedstudio.com/LoRa_E5_mini/#13-connect-and-send-data-to-the-things-network) here to setup your TTN application, get your **Application EUI** and copy it to the macro definition `LORAWAN_JOIN_EUI` in `LoRaWAN/App/se-identity.h` , for example, the Application EUI here is `80 00 00 00 00 00 00 0x07` :
-```C
+```cpp
// LoRaWAN/App/se-identity.h
/*!
@@ -457,7 +457,7 @@ Now we will modify our **Device EUI**, **Application EUI**, **Application KEY**
- **Step 8.** Also, you can modify your **Device EUI** and **Application Key**, by setting the macro definition `LORAWAN_DEVICE_EUI` and `LORAWAN_NWK_KEY` in `LoRaWAN/App/se-identity.h`. Make sure `LORAWAN_DEVICE_EUI` and `LORAWAN_NWK_KEY` are the same as the `Device EUI` and `App Key` in TTN console.
-```C
+```cpp
// LoRaWAN/App/se-identity.h
/*!
diff --git a/docs/Sensor/Wio_Series/Wio_Tracker/Wio-Extension-RTC.md b/docs/Sensor/Wio_Series/Wio_Tracker/Wio-Extension-RTC.md
index 1ff7a72afbed..a6712ad8ceb9 100644
--- a/docs/Sensor/Wio_Series/Wio_Tracker/Wio-Extension-RTC.md
+++ b/docs/Sensor/Wio_Series/Wio_Tracker/Wio-Extension-RTC.md
@@ -165,7 +165,7 @@ Unzip the [sample sketch](https://github.com/Seeed-Studio/Wio_Extension_RTC/raw/
6. Use Serial monitor to print the serial message.
-```c++
+```cpp
#include
#include "WioRTC.h"
diff --git a/docs/Sensor/Wio_Series/Wio_Tracker/Wio_LTE_Cat.1.md b/docs/Sensor/Wio_Series/Wio_Tracker/Wio_LTE_Cat.1.md
index 09a9589c887d..0d826c216487 100644
--- a/docs/Sensor/Wio_Series/Wio_Tracker/Wio_LTE_Cat.1.md
+++ b/docs/Sensor/Wio_Series/Wio_Tracker/Wio_LTE_Cat.1.md
@@ -375,7 +375,7 @@ Hi, the board of "Wio LTE Cat.1" is stored in "Seeed SAMD Boards" package like "
- Step 8. Select Sketch-->Upload to upload the code to Wio_LTE.
- Step 9. Press **RST** button to enable the COM port.
-```c++
+```cpp
#include "wio_tracker.h"
char message[128] = "Hello from Wio Traker!";
@@ -413,7 +413,7 @@ void loop() {
- Step 10.Use COM monitor tools to print the serial message. **Please do not use Arduino IDE COM monitor! That may cause the next time downloading fail, but reopen Arduino IDE can recover that issue**.
- Step 11. The phone number owner will receive the message.
-```C++
+```cpp
Power On!
@@ -435,7 +435,7 @@ Send OK!
- Step 7. Select Sketch-->Upload to upload the code to Wio_LTE.
- Step 8. Press **RST** button to enable the COM port.
-```C++
+```cpp
#include "wio_tracker.h"
uint16_t newSMSNumber = -1;
@@ -485,7 +485,7 @@ void loop() {
- Step 9.Use COM monitor tools to print the serial message. **Please do not use Arduino IDE COM monitor! That may cause the next time downloading fail, but reopen Arduino IDE can recover that issue**.
- Step 10. Open serial monitor, when seeing **Waitting for new SMS!**, send message to the board, the new message will display soon with phone number, time, content.
-```C
+```cpp
Power On!
Wait for network registered...
@@ -517,7 +517,7 @@ Waiting for new SMS!
- Step 7. Select Sketch-->Upload to upload the code to Wio_LTE.
- Step 8. Press **RST** button to enable the COM port.
-```c++
+```cpp
#include "gnss.h"
@@ -566,7 +566,7 @@ void loop() {
- Step 9.Use COM monitor tools to print the serial message. **Please do not use Arduino IDE COM monitor! That may cause the next time downloading fail, but reopen Arduino IDE can recover that issue**.
- Step 10. We will see lat, lon info printed on screen.
-```C
+```cpp
Waitting for module to alvie...
Waitting for module to alvie...
Waitting for module to alvie...
@@ -610,7 +610,7 @@ Data type in string: 113.966248,22.583819
- Step 7. Select Sketch-->Upload to upload the code to Wio_LTE.
- Step 8. Press **RST** button to enable the COM port.
-```C
+```cpp
#include "gnss.h"
@@ -664,7 +664,7 @@ void loop() {
- Step 9.Use COM monitor tools to print the serial message. **Please do not use Arduino IDE COM monitor! That may cause the next time downloading fail, but reopen Arduino IDE can recover that issue**.
- Step 10. We will see below logs.
-```C
+```cpp
Waitting for module to alvie...
Waitting for module to alvie...
Waitting for module to alvie...
@@ -741,7 +741,7 @@ $GPVTG,,T,2.3,M,0.0,N,0.0,K,A*0C
- Step 10.Use COM monitor tools to print the serial message. **Please do not use Arduino IDE COM monitor! That may cause the next time downloading fail, but reopen Arduino IDE can recover that issue**.
- Step 11. The phone number owner will receive the call.
-```c++
+```cpp
#include "wio_tracker.h"
WioTracker wio = WioTracker();
@@ -788,7 +788,7 @@ void loop() {
- Step 7. Keep COM Port blank.
- Step 8. Select Sketch-->Upload to upload the code to Wio_LTE.
-```C
+```cpp
#include "ethernet.h"
Ethernet eth = Ethernet();
@@ -898,7 +898,7 @@ Hello world!
- Step 8. Select Sketch-->Upload to upload the code to Wio_LTE.
-```C
+```cpp
// include the SD library:
#include
@@ -985,7 +985,7 @@ void loop(void) {
-```C
+```cpp
Initializing SD card...
Card type: SDHC
diff --git a/docs/Sensor/Wio_Series/Wio_Tracker/Wio_LTE_Cat_M1_NB-IoT_Tracker.md b/docs/Sensor/Wio_Series/Wio_Tracker/Wio_LTE_Cat_M1_NB-IoT_Tracker.md
index a1edbc2b1166..c2a525551678 100644
--- a/docs/Sensor/Wio_Series/Wio_Tracker/Wio_LTE_Cat_M1_NB-IoT_Tracker.md
+++ b/docs/Sensor/Wio_Series/Wio_Tracker/Wio_LTE_Cat_M1_NB-IoT_Tracker.md
@@ -153,7 +153,7 @@ running up to 168MHZ
- Step 6. Select Sketch-->Upload to upload the code to Wio_LTE.
-```c++
+```cpp
#include
#include
@@ -191,7 +191,7 @@ void loop() {
- Step 7. Select Sketch-->Upload to upload the code to Wio LTE Cat NB1.
- Step 8. Press **RST** button to enable the COM port.
-```c++
+```cpp
#include
@@ -214,7 +214,7 @@ void loop() {
- Step 9. Use COM monitor tools to print the serial message. **Please do not use Arduino IDE COM monitor! That may cause the next time downloading fail, but reopen Arduino IDE can recover that issue**.
- Step 10. We will see lat, lon info printed on screen.
-```C++
+```cpp
$GNRMC,,V,,,,,,,,,,N*4D
$GNVTG,,,,,,,,,N*2E
$GNGGA,,,,,,0,00,99.99,,,,,,*56
@@ -253,7 +253,7 @@ $GNGLL,,,,,,V,N*7A
- Step 7. Select Sketch-->Upload to upload the code to Wio_LTE.
-```C++
+```cpp
// include the SD library:
#include
@@ -354,7 +354,7 @@ void loop(void) {
- Step 9.Use COM monitor tools to print the serial message. **Please do not use Arduino IDE COM monitor! That may cause the next time downloading fail, but reopen Arduino IDE can recover that issue**.
- Step 10. Open serial monitor, we will see below info on screen.
-```C++
+```cpp
Initializing SD card...
Card type: SDHC
@@ -377,7 +377,7 @@ Files found on the card (name, date and size in bytes):
- Step 6. Select Sketch-->Upload to upload the code to Wio_LTE.
-```c++
+```cpp
#include
#include
@@ -415,7 +415,7 @@ void loop() {
- Step 7. Press **RST**, then you can see below info on screen.
-```c++
+```cpp
AT+CSQ
+CSQ: 99,99
@@ -449,7 +449,7 @@ AT+CSQ
- Step 5. Keep COM Port blank.
- Step 6. Select Sketch-->Upload to upload the code to Wio_LTE.
-```c++
+```cpp
#include
Ublox_sara_r4 ublox = Ublox_sara_r4();
@@ -521,7 +521,7 @@ void loop() {
- Step 7. Press **RST**, then you can see below info on screen.
-```c++
+```cpp
[INFO] Begin...
[INFO] Waitting for module to alvie...
...
@@ -549,7 +549,7 @@ void loop() {
- Step 5. Keep COM Port blank.
- Step 6. Select Sketch-->Upload to upload the code to Wio_LTE.
-```c++
+```cpp
#include
Ublox_sara_r4 ublox = Ublox_sara_r4();
@@ -648,7 +648,7 @@ void loop() {
- Step 5. Keep COM Port blank.
- Step 6. Select Sketch-->Upload to upload the code to Wio_LTE.
-```c++
+```cpp
#include
#include
@@ -745,7 +745,7 @@ void loop()
- Step 5. Keep COM Port blank.
- Step 6. Select Sketch-->Upload to upload the code to Wio_LTE.
-```c++
+```cpp
#include
#include
diff --git a/docs/Sensor/Wio_Series/Wio_Tracker/wio_gps_board.md b/docs/Sensor/Wio_Series/Wio_Tracker/wio_gps_board.md
index 03f0a7e2b3fc..99c8ce7606f8 100644
--- a/docs/Sensor/Wio_Series/Wio_Tracker/wio_gps_board.md
+++ b/docs/Sensor/Wio_Series/Wio_Tracker/wio_gps_board.md
@@ -484,7 +484,7 @@ void loop() {
- **Step 5.** Upload code to Wio GPS board, it shows how to read a file from the SD card using the SD library and send it over the serial port.
-```c++
+```cpp
/*
SD card file dump
diff --git a/docs/Sensor/Wio_Terminal/Application/Easy_IoT/Connect-Wio-Terminal-to-Google-Cloud-IoT-Core.md b/docs/Sensor/Wio_Terminal/Application/Easy_IoT/Connect-Wio-Terminal-to-Google-Cloud-IoT-Core.md
index f08f9b01d120..c9b3d9a566ce 100644
--- a/docs/Sensor/Wio_Terminal/Application/Easy_IoT/Connect-Wio-Terminal-to-Google-Cloud-IoT-Core.md
+++ b/docs/Sensor/Wio_Terminal/Application/Easy_IoT/Connect-Wio-Terminal-to-Google-Cloud-IoT-Core.md
@@ -201,14 +201,14 @@ Now we need to set the Wi-Fi credentials and Google Cloud IoT Core information i
- **STEP 3:** Change the **Wifi network details**
-```c++
+```cpp
const char *ssid = "Enter_SSID";
const char *password = "Enter_Password";
```
- **STEP 4:** Change the **Google Cloud IoT details**
-```c++
+```cpp
const char *project_id = "Enter_Project_ID";
const char *location = "Enter_location";
const char *registry_id = "Enter_Registry_ID";
@@ -217,7 +217,7 @@ const char *device_id = "Enter_Device_ID";
- **STEP 5:** Copy the private key bytes that we obtained from **ec_private.pem** and saved into notepad before
-```c++
+```cpp
const char *private_key_str =
"6e:b8:17:35:c7:fc:6b:d7:a9:cb:cb:49:7f:a0:67:"
"63:38:b0:90:57:57:e0:c0:9a:e8:6f:06:0c:d9:ee:"
@@ -230,7 +230,7 @@ const char *private_key_str =
Open **esp32-mqtt.h** and replace the entire file with the following codes. Here we have replaced configTime function with the implementation of obtaining NTP time via UDP.
-```c++
+```cpp
#include
#include
#include
@@ -437,7 +437,7 @@ void setupCloudIoT(){
Add Wio Terminal board to macro definitions inside **Esp32-lwmqtt.ino**
-```c++
+```cpp
#if defined(ESP32) || defined(WIO_TERMINAL)
#define __ESP32_MQTT_H__
#endif
@@ -506,7 +506,7 @@ Navigate to **Esp32-lwmqtt.ino** and add the following
- **STEP 1:** After the loop, add the following for the built-in light sensor
-```c++
+```cpp
void loop() {
int light = analogRead(WIO_LIGHT); //assign variable to store light sensor values
light = map(light,0,1023,0,100); //Map sensor values
@@ -514,7 +514,7 @@ void loop() {
- **STEP 2:** Add the topic with the Subfolder name
-```c++
+```cpp
publishTelemetry(getDefaultSensor());
publishTelemetry("/light",String(light));
```
@@ -550,7 +550,7 @@ Navigate to the previously used **Esp32-lwmqtt.ino** and add the following:
- **STEP 1:** Add the following after **#include "esp32-mqtt.h"**
-```c++
+```cpp
#include "DHT.h" //DHT library
#define DHTPIN 0 //Define Signal Pin of DHT
@@ -560,13 +560,13 @@ DHT dht(DHTPIN, DHTTYPE); //Initializing DHT sensor
- **STEP 2:** Add the following inside the **setup** to start the DHT sensor
-```c++
+```cpp
dht.begin();
```
- **STEP 3:** Add the following inside the **if loop** within **void loop()**
-```c++
+```cpp
int temperature = dht.readTemperature(); //Assign variable to store temperature
int humidity = dht.readHumidity(); //Assign variable to store humidity
diff --git a/docs/Sensor/Wio_Terminal/Extension_Board/Wio_Terminal_LoRaWan_Chassis_with_Antenna-built-in_LoRa-E5_and_GNSS_EU868_US915.md b/docs/Sensor/Wio_Terminal/Extension_Board/Wio_Terminal_LoRaWan_Chassis_with_Antenna-built-in_LoRa-E5_and_GNSS_EU868_US915.md
index 612764a60a63..91979cc72fff 100644
--- a/docs/Sensor/Wio_Terminal/Extension_Board/Wio_Terminal_LoRaWan_Chassis_with_Antenna-built-in_LoRa-E5_and_GNSS_EU868_US915.md
+++ b/docs/Sensor/Wio_Terminal/Extension_Board/Wio_Terminal_LoRaWan_Chassis_with_Antenna-built-in_LoRa-E5_and_GNSS_EU868_US915.md
@@ -193,7 +193,7 @@ Step 5: Add the code for decode the data: