+
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+






| 模型名字 | +精度 | +推理尺寸 | +推理时间 (ms) | +FPS | +
|---|---|---|---|---|
| YOLOv5s | +FP32 | +320x320 | +16.66 | +60 | +
| FP32 | +640x640 | +33.33 | +30 | +|
| INT8 | +640x640 | +16.66 | +60 | +|
| YOLOv5n | +FP32 | +640x640 | +16.66 | +60 | +






| DeepStream 版本 | +JetPack 版本 | +
|---|---|
| 6.2 | +5.1.1 | +
| 5.1 | +|
| 6.1.1 | +5.0.2 | +
| 6.1 | +5.0.1 DP | +
| 6.0.1 | +4.6.3 | +
| 4.6.2 | +|
| 4.6.1 | +|
| 6.0 | +4.6 | +

| 模型 | +尺寸 (像素) |
+ mAPval 50-95 |
+ CPU ONNX 速度 (ms) |
+ A100 TensorRT 速度 (ms) |
+ 参数 (M) |
+ FLOPs (B) |
+
|---|---|---|---|---|---|---|
| YOLOv8n | +640 | +37.3 | +80.4 | +0.99 | +3.2 | +8.7 | +
| YOLOv8s | +640 | +44.9 | +128.4 | +1.20 | +11.2 | +28.6 | +
| YOLOv8m | +640 | +50.2 | +234.7 | +1.83 | +25.9 | +78.9 | +
| YOLOv8l | +640 | +52.9 | +375.2 | +2.39 | +43.7 | +165.2 | +
| YOLOv8x | +640 | +53.9 | +479.1 | +3.53 | +68.2 | +257.8 | +

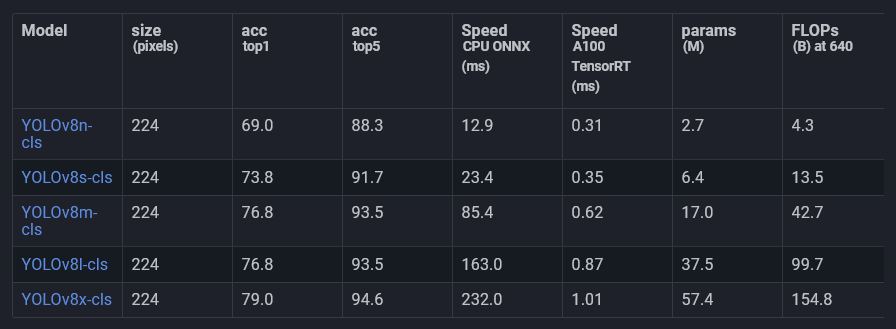
| 模型 | +尺寸 (像素) |
+ acc top1 |
+ acc top5 |
+ CPU ONNX 速度 (ms) |
+ A100 TensorRT 速度 (ms) |
+ 参数 (M) |
+ FLOPs (B) at 640 |
+
|---|---|---|---|---|---|---|---|
| YOLOv8n-cls | +224 | +66.6 | +87.0 | +12.9 | +0.31 | +2.7 | +4.3 | +
| YOLOv8s-cls | +224 | +72.3 | +91.1 | +23.4 | +0.35 | +6.4 | +13.5 | +
| YOLOv8m-cls | +224 | +76.4 | +93.2 | +85.4 | +0.62 | +17.0 | +42.7 | +
| YOLOv8l-cls | +224 | +78.0 | +94.1 | +163.0 | +0.87 | +37.5 | +99.7 | +
| YOLOv8x-cls | +224 | +78.4 | +94.3 | +232.0 | +1.01 | +57.4 | +154.8 | +

| 模型 | +尺寸 (像素) |
+ mAPbox 50-95 |
+ mAPmask 50-95 |
+ CPU ONNX 速度 (ms) |
+ A100 TensorRT 速度 (ms) |
+ 参数 (M) |
+ FLOPs (B) |
+
|---|---|---|---|---|---|---|---|
| YOLOv8n-seg | +640 | +36.7 | +30.5 | +96.1 | +1.21 | +3.4 | +12.6 | +
| YOLOv8s-seg | +640 | +44.6 | +36.8 | +155.7 | +1.47 | +11.8 | +42.6 | +
| YOLOv8m-seg | +640 | +49.9 | +40.8 | +317.0 | +2.18 | +27.3 | +110.2 | +
| YOLOv8l-seg | +640 | +52.3 | +42.6 | +572.4 | +2.79 | +46.0 | +220.5 | +
| YOLOv8x-seg | +640 | +53.4 | +43.4 | +712.1 | +4.02 | +71.8 | +344.1 | +

| 模型 | +尺寸 (像素) |
+ mAPpose 50-95 |
+ mAPpose 50 |
+ CPU ONNX 速度 (ms) |
+ A100 TensorRT 速度 (ms) |
+ 参数 (M) |
+ FLOPs (B) |
+
|---|---|---|---|---|---|---|---|
| YOLOv8n-pose | +640 | +50.4 | +80.1 | +131.8 | +1.18 | +3.3 | +9.2 | +
| YOLOv8s-pose | +640 | +60.0 | +86.2 | +233.2 | +1.42 | +11.6 | +30.2 | +
| YOLOv8m-pose | +640 | +65.0 | +88.8 | +456.3 | +2.00 | +26.4 | +81.0 | +
| YOLOv8l-pose | +640 | +67.6 | +90.0 | +784.5 | +2.59 | +44.4 | +168.6 | +
| YOLOv8x-pose | +640 | +69.2 | +90.2 | +1607.1 | +3.73 | +69.4 | +263.2 | +
| YOLOv8x-pose-p6 | +1280 | +71.6 | +91.2 | +4088.7 | +10.04 | +99.1 | +1066.4 | +




| Key | +Value | +Description | +
|---|---|---|
| imgsz | +640 | +Image size as scalar or (h, w) list, i.e. (640, 480) | +
| half | +False | +FP16 quantization | +
| dynamic | +False | +Dynamic axes | +
| simplify | +False | +Simplify model | +
| workspace | +4 | +Workspace size (GB) | +
































 +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+| + | + |
|---|---|
|
+ Jetson Community Project Gallery Jetson's community project gallery offers a ton of amazing work, and more importantly. You can also showcase your own Jetson masterpieces here. Go now > |
+


































| + | + |
|---|---|
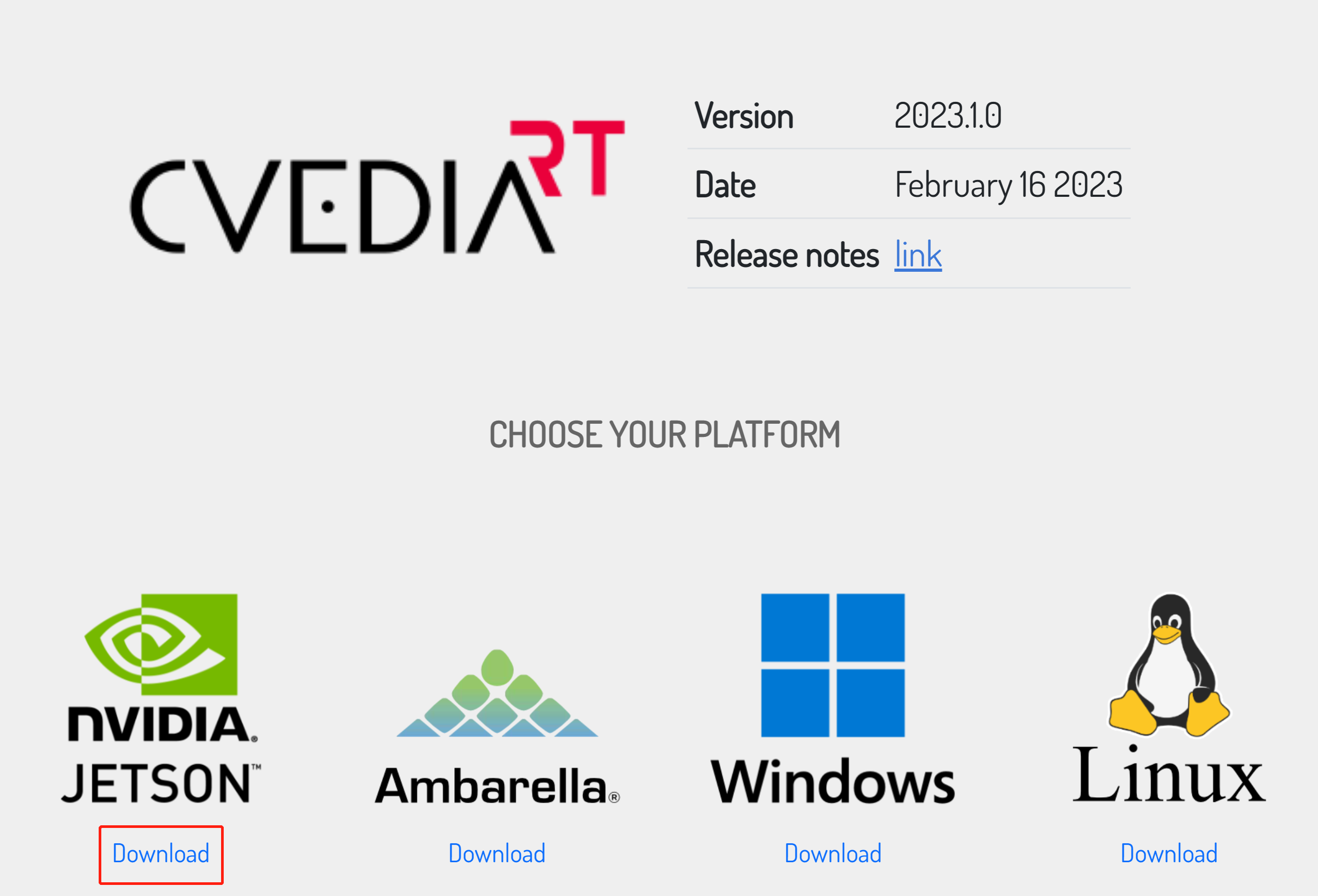
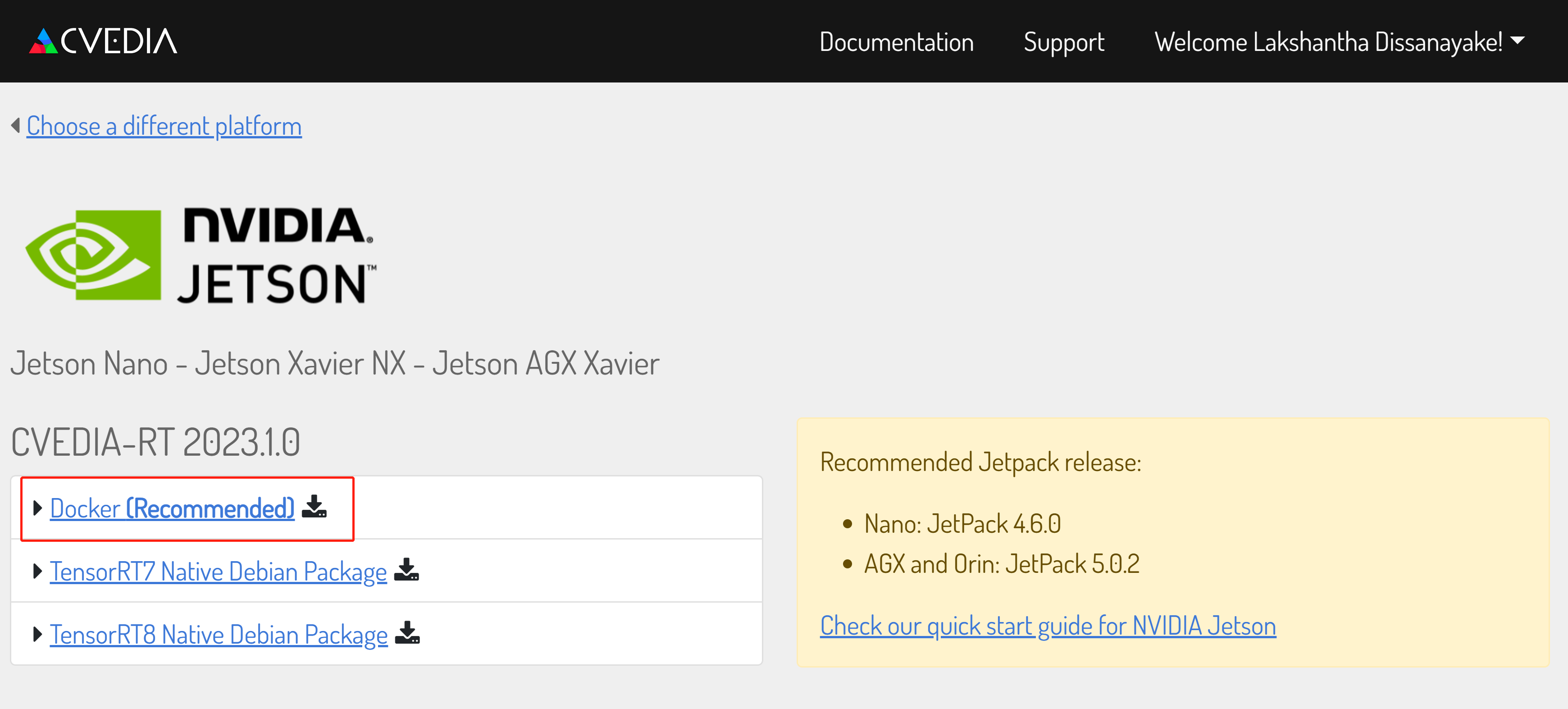
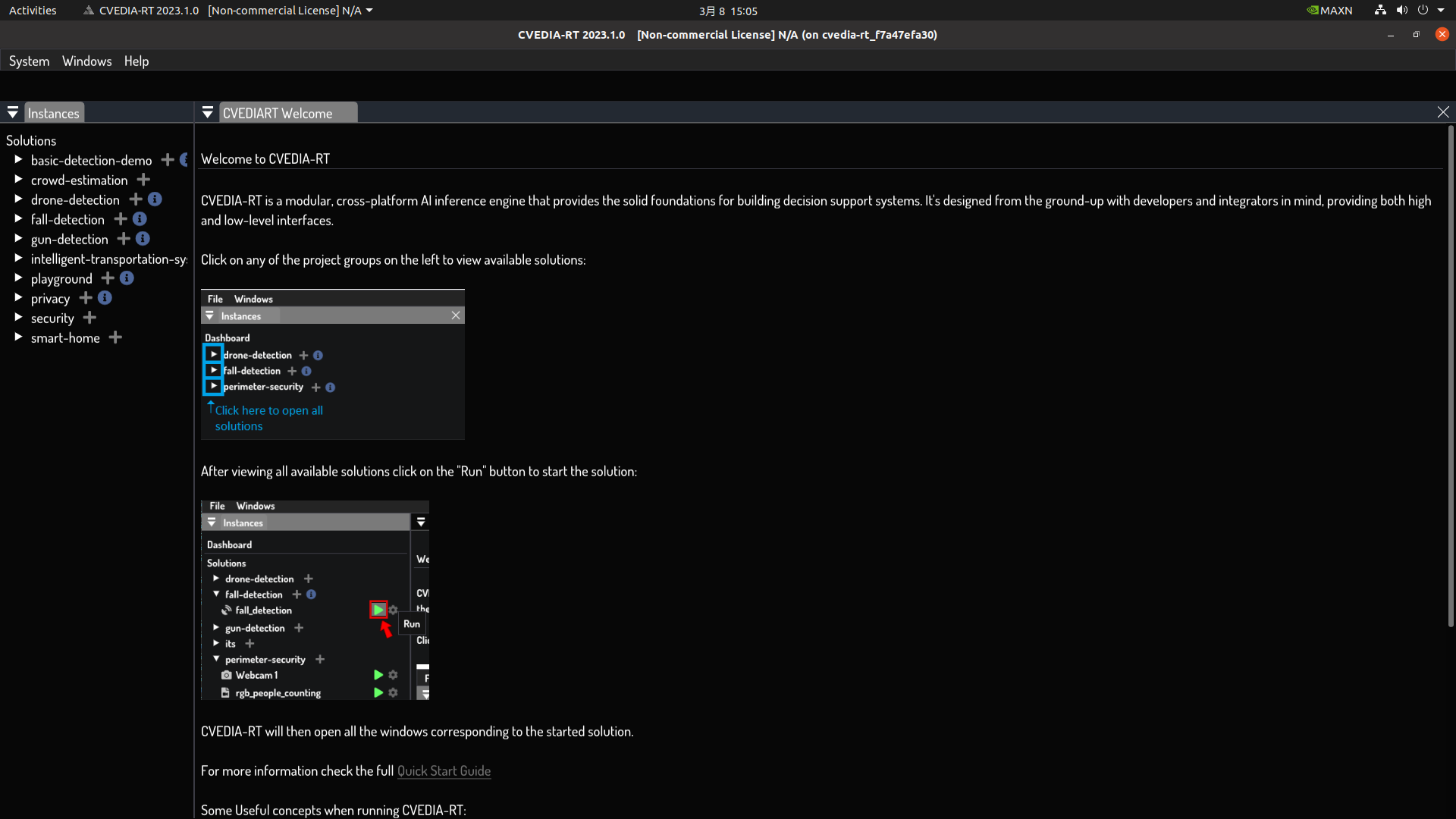
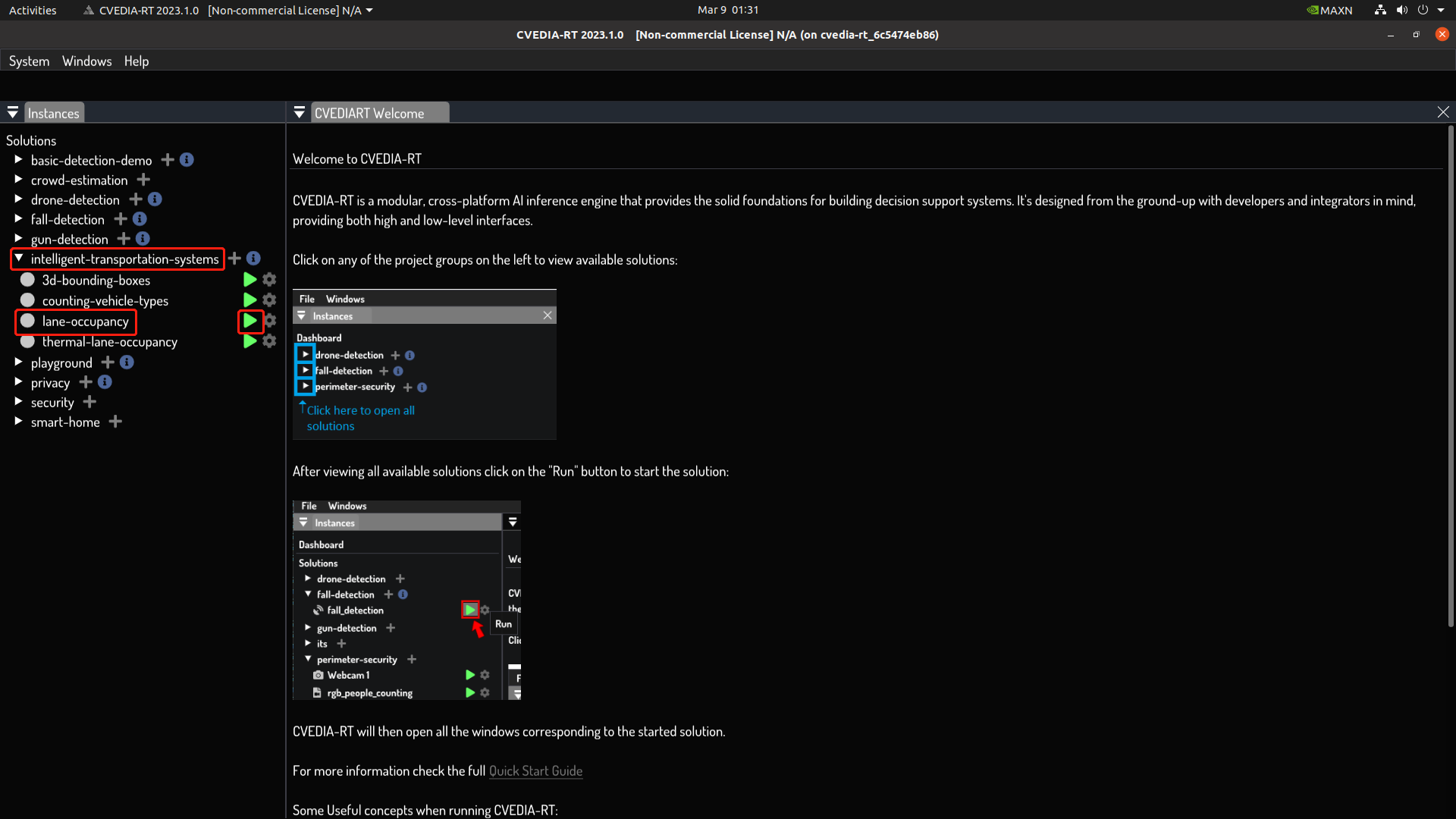
| CVEDIA-RT CVEDIA-RT is a modular, cross-platform AI inference engine that provides solid foundations for building decision support systems. It's designed from the ground-up with developers and integrators in mind, providing both high and low-level interfaces. Learn more > Getting Started with CVEDIA-RT on NVIDIA® Jetson Devices > |
+ |
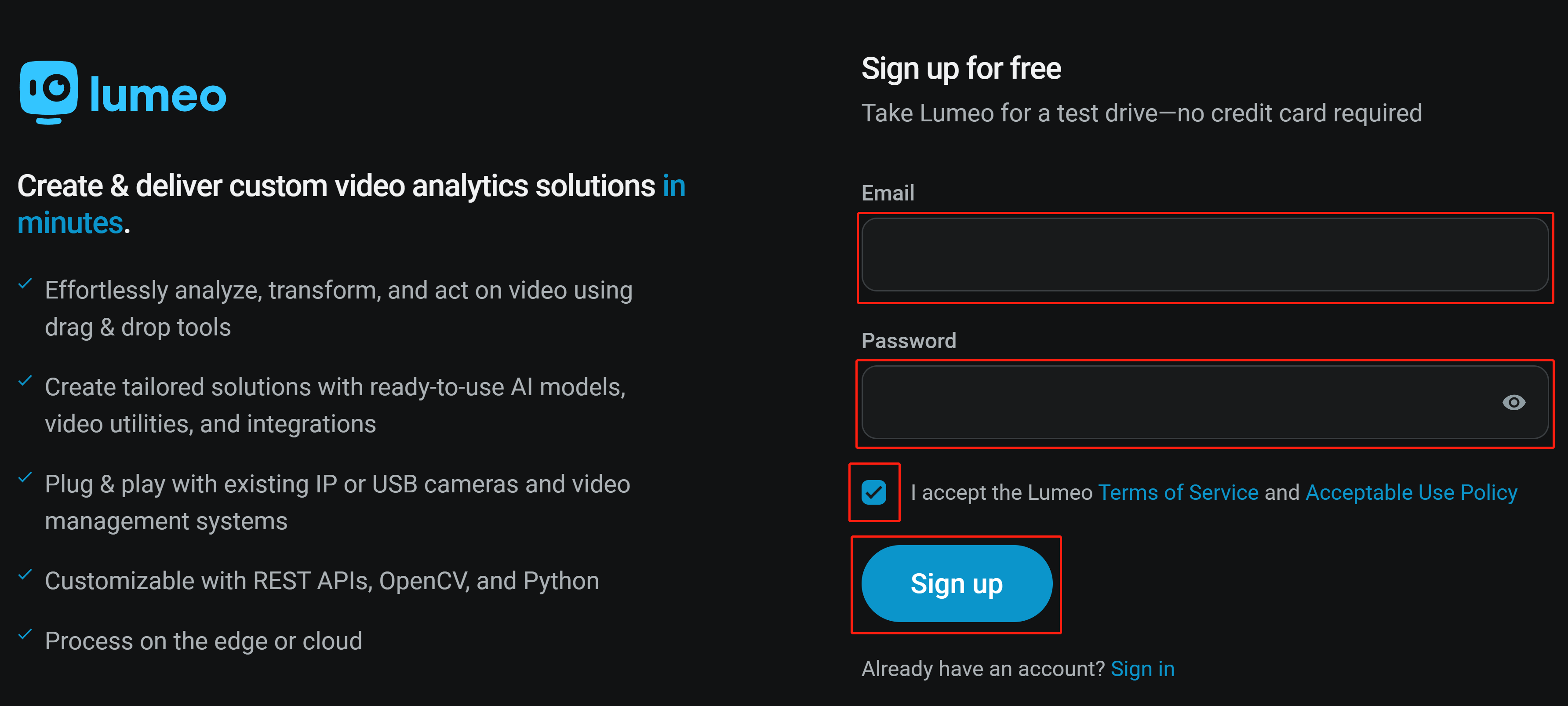
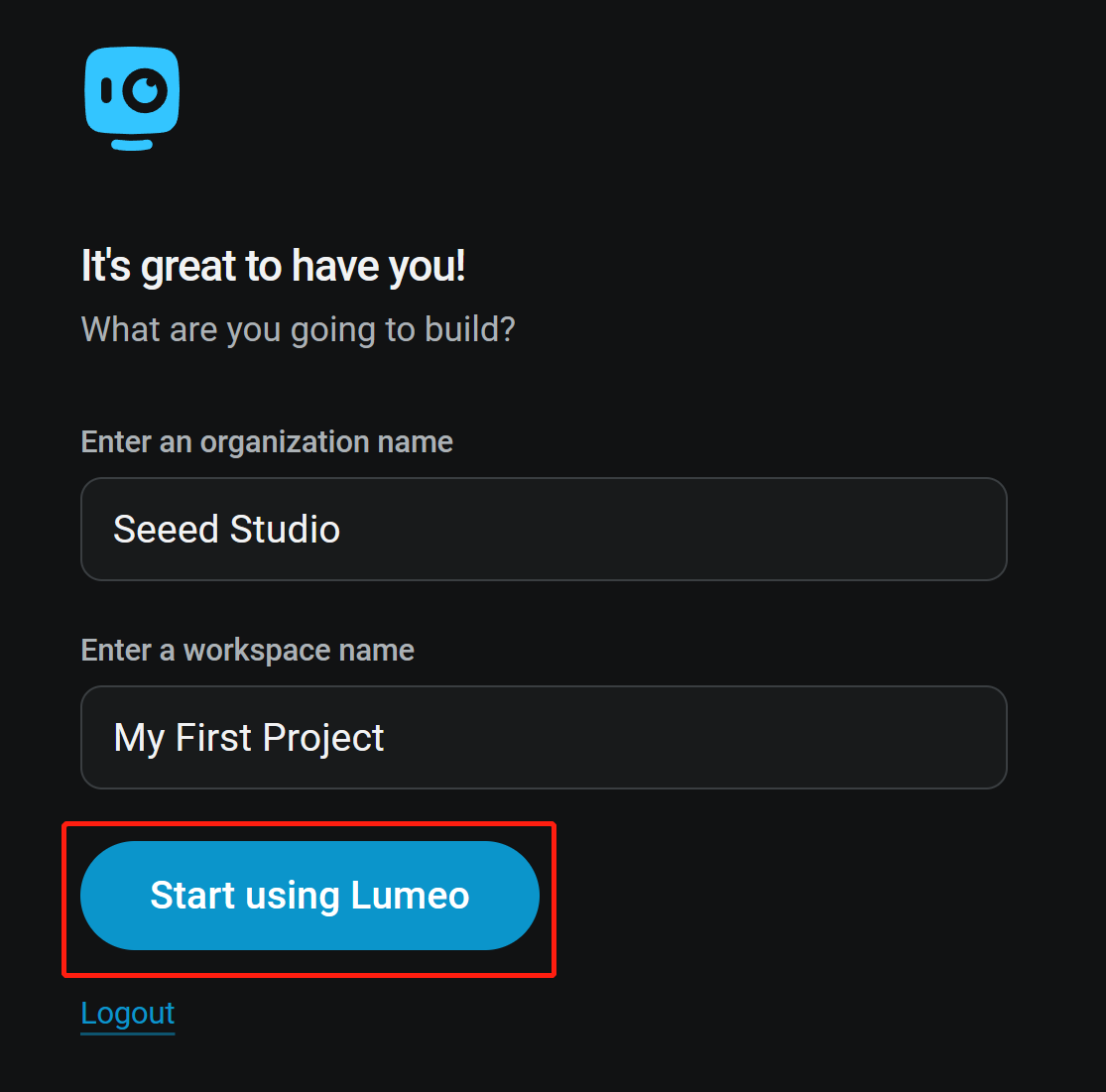
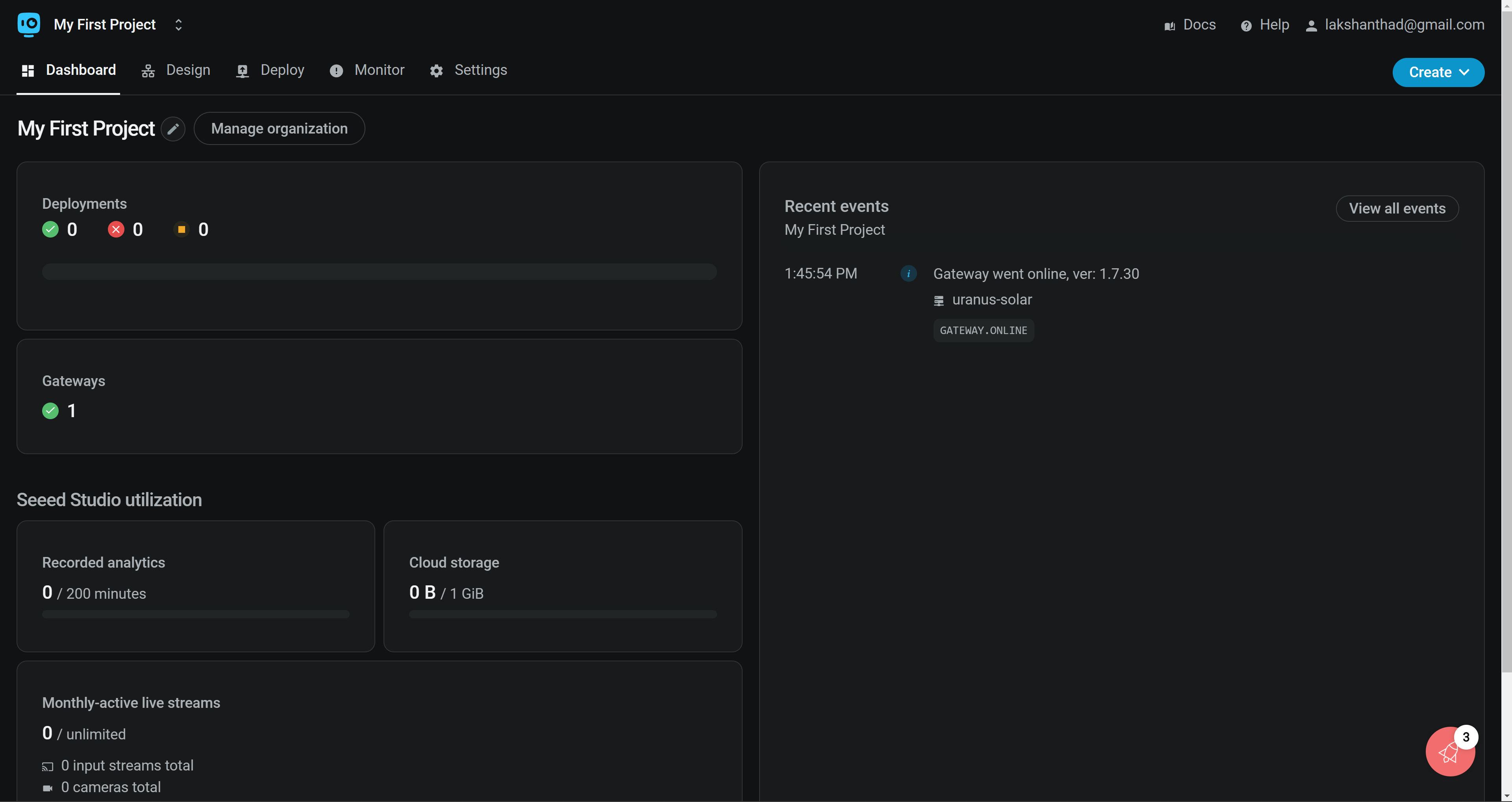
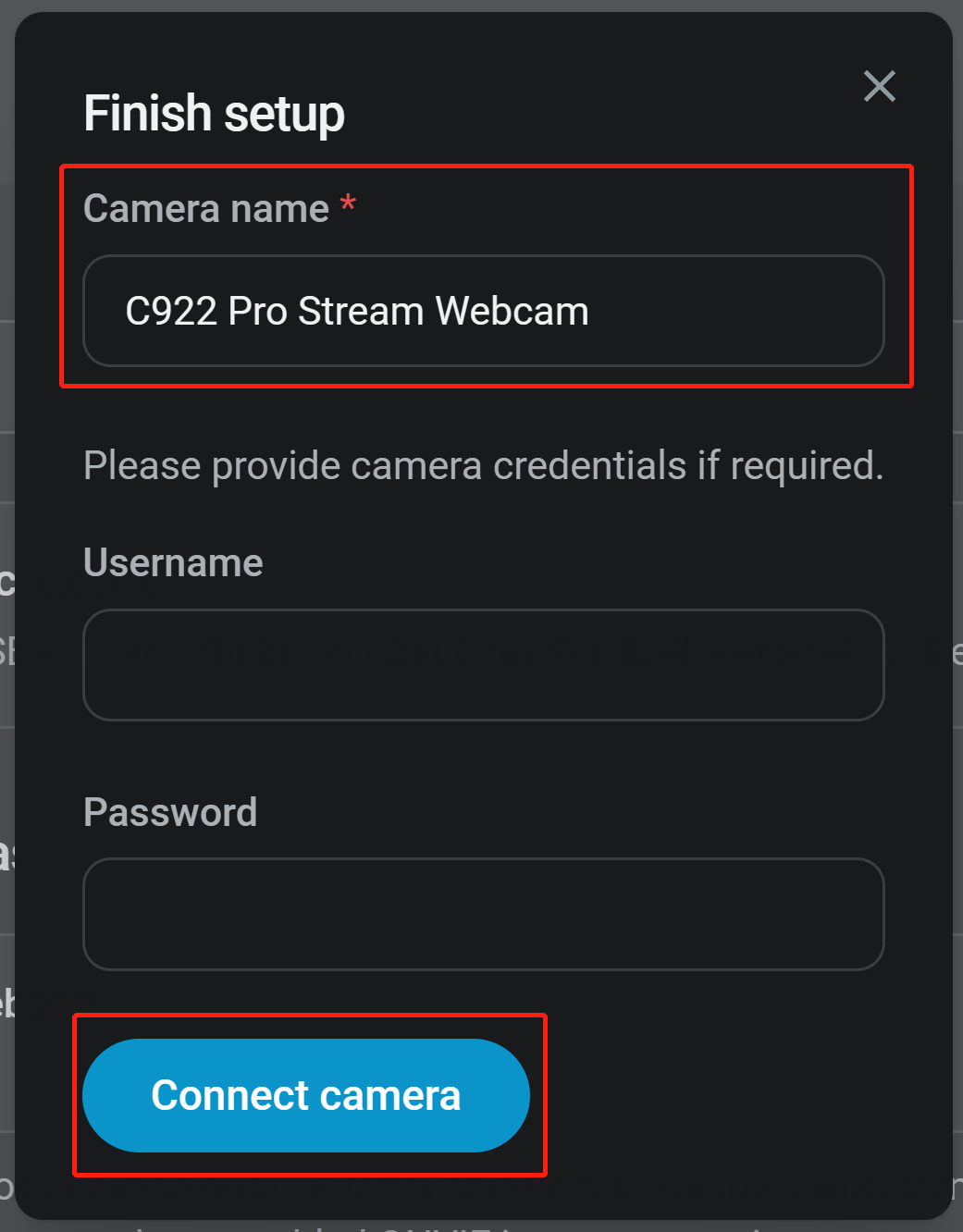
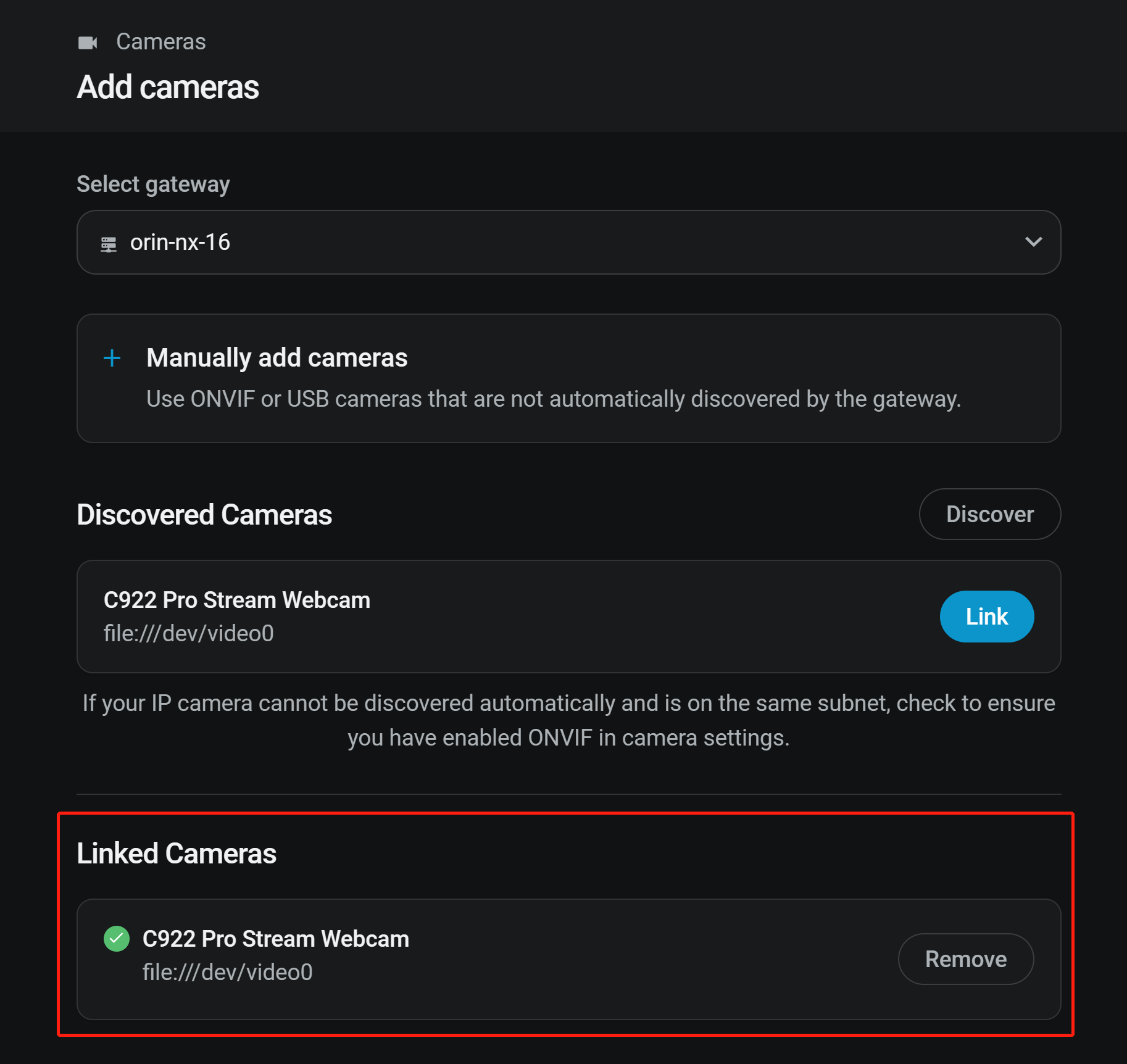
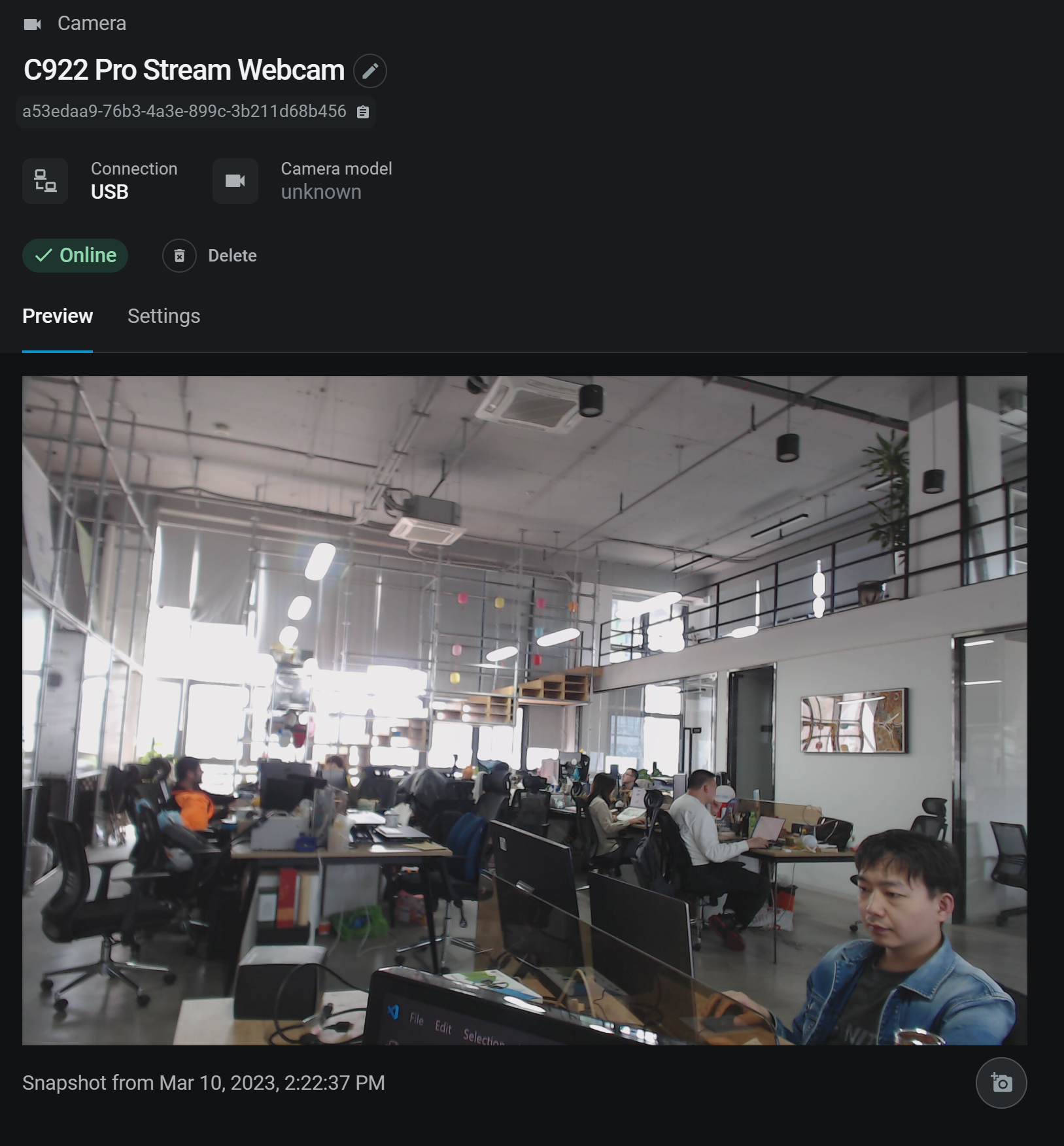
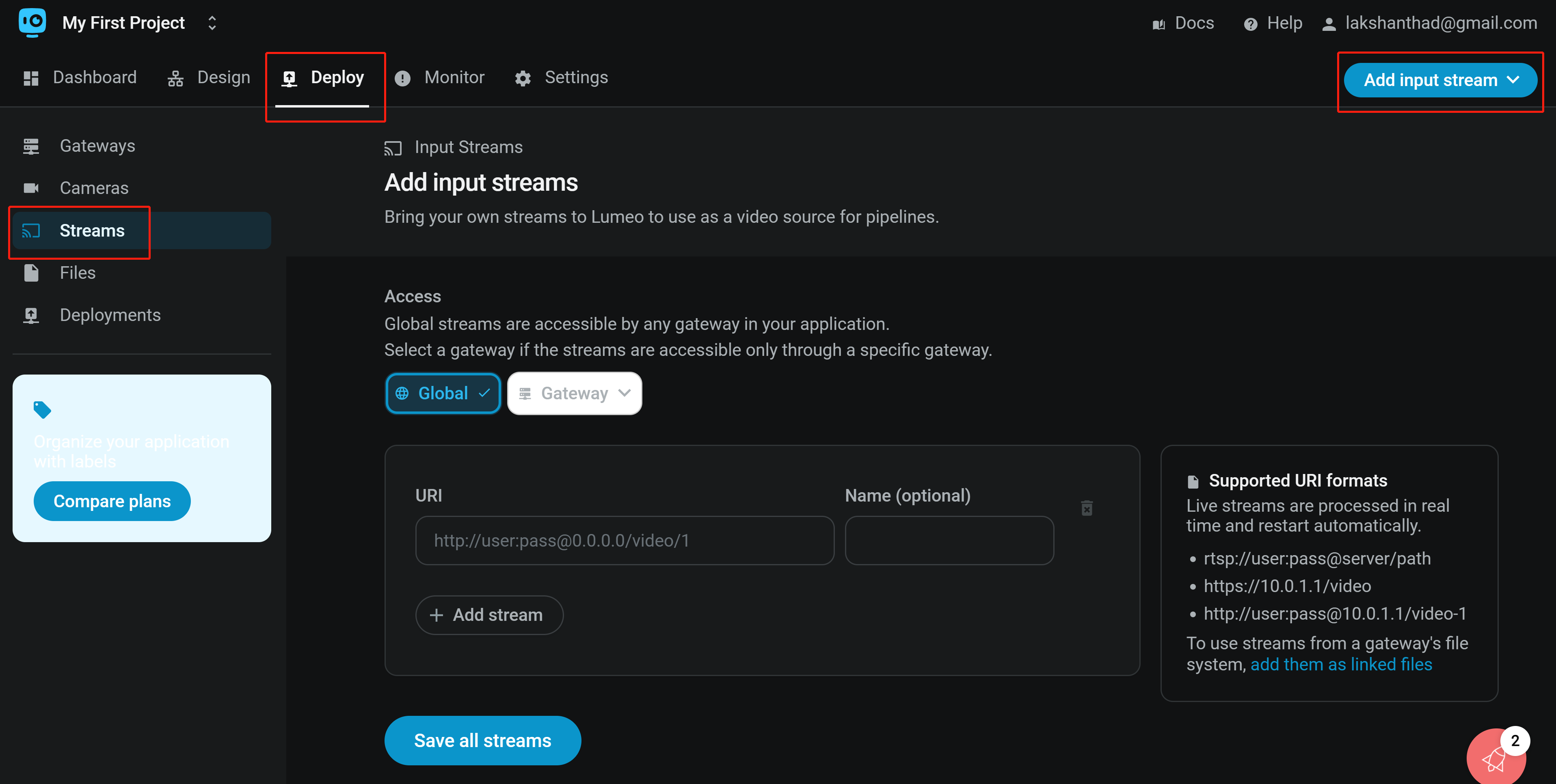
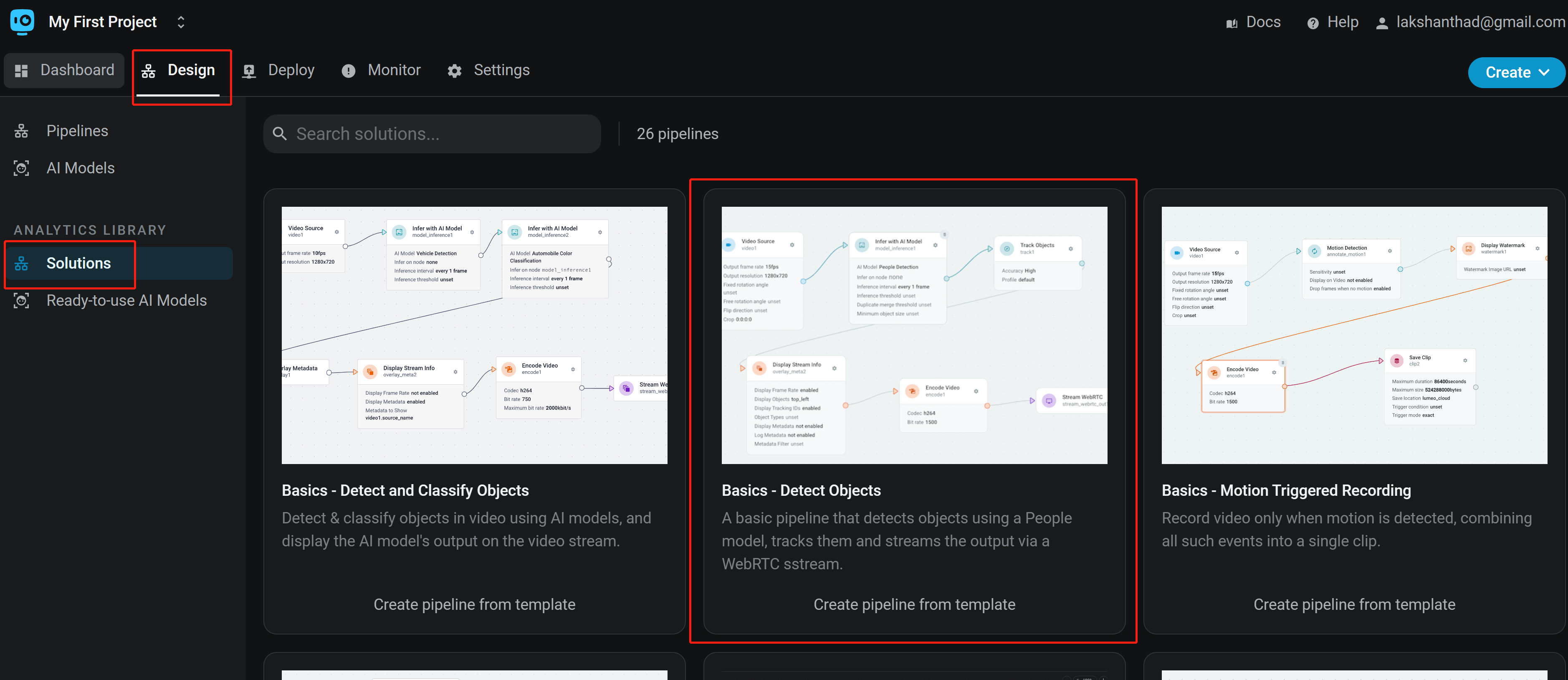
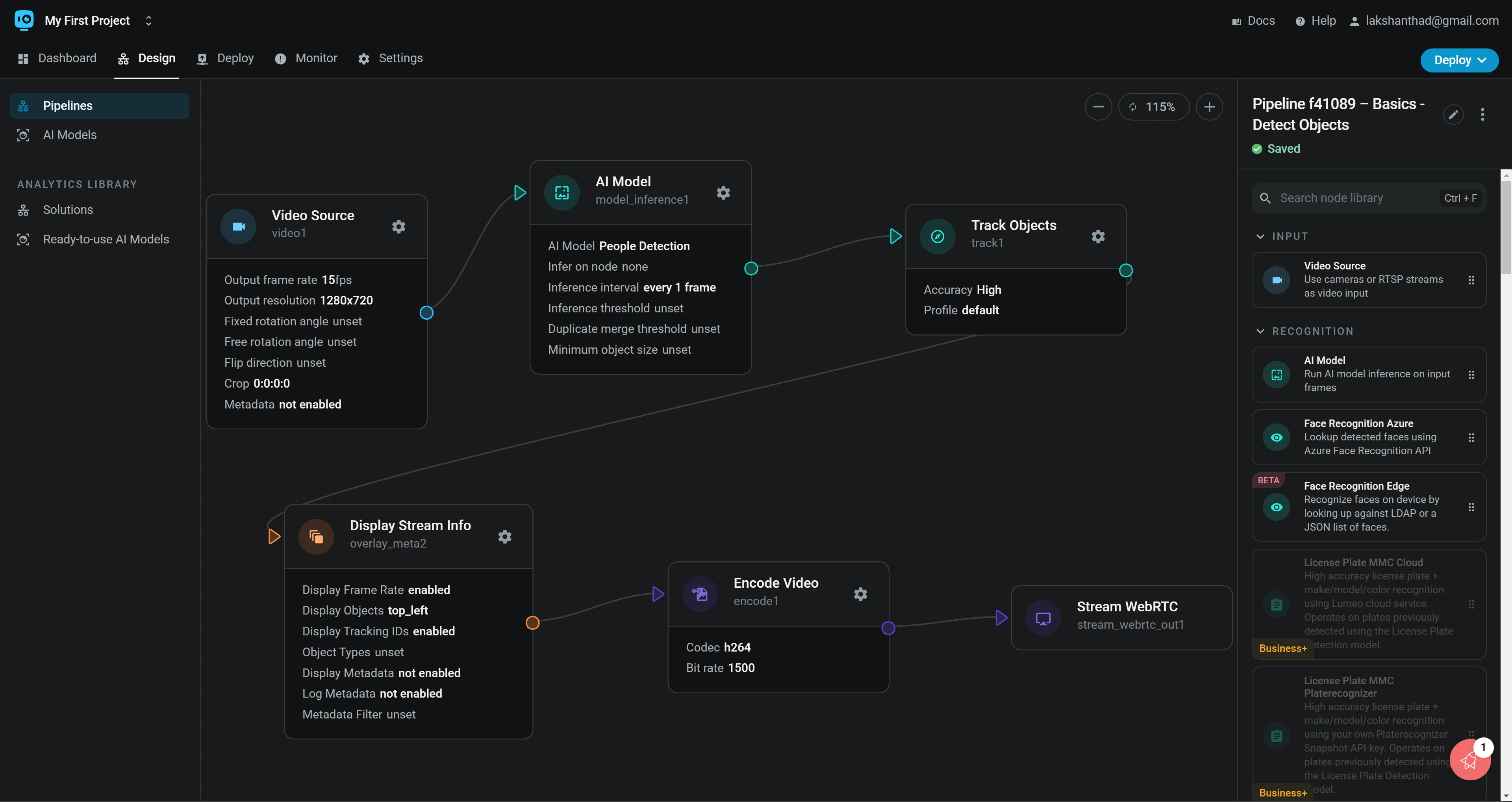
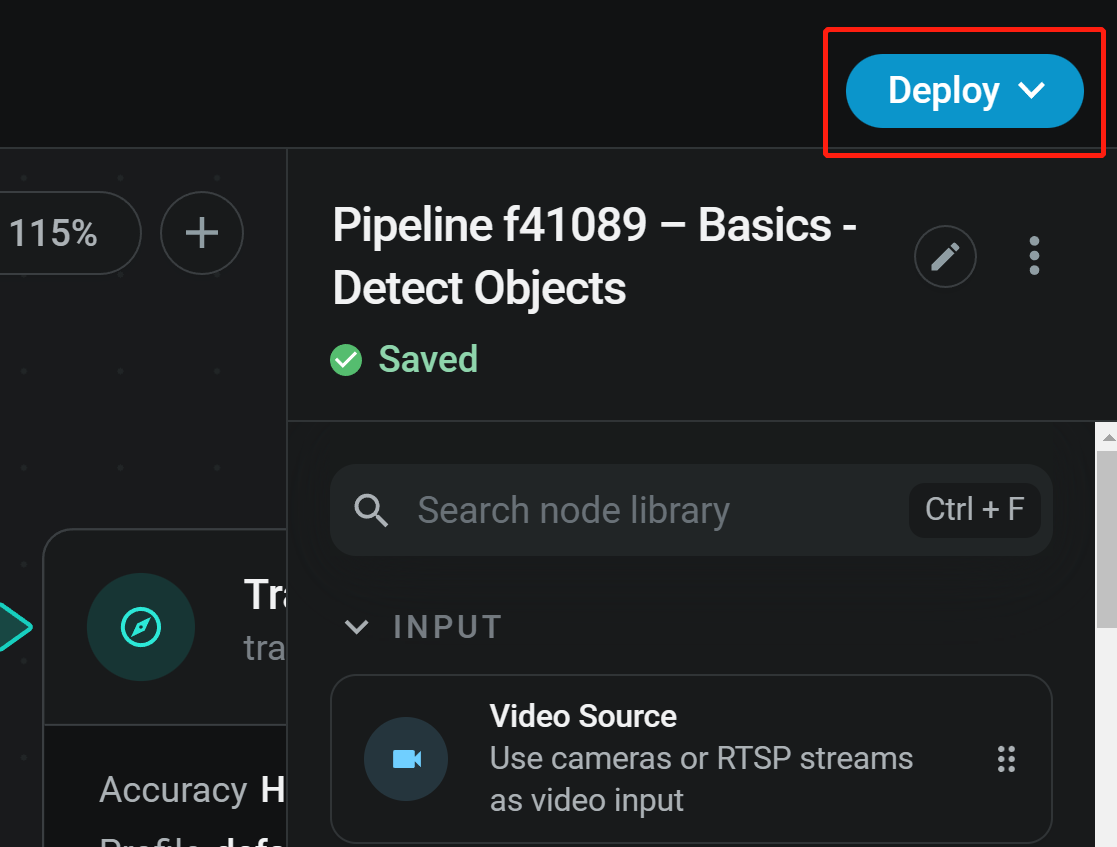
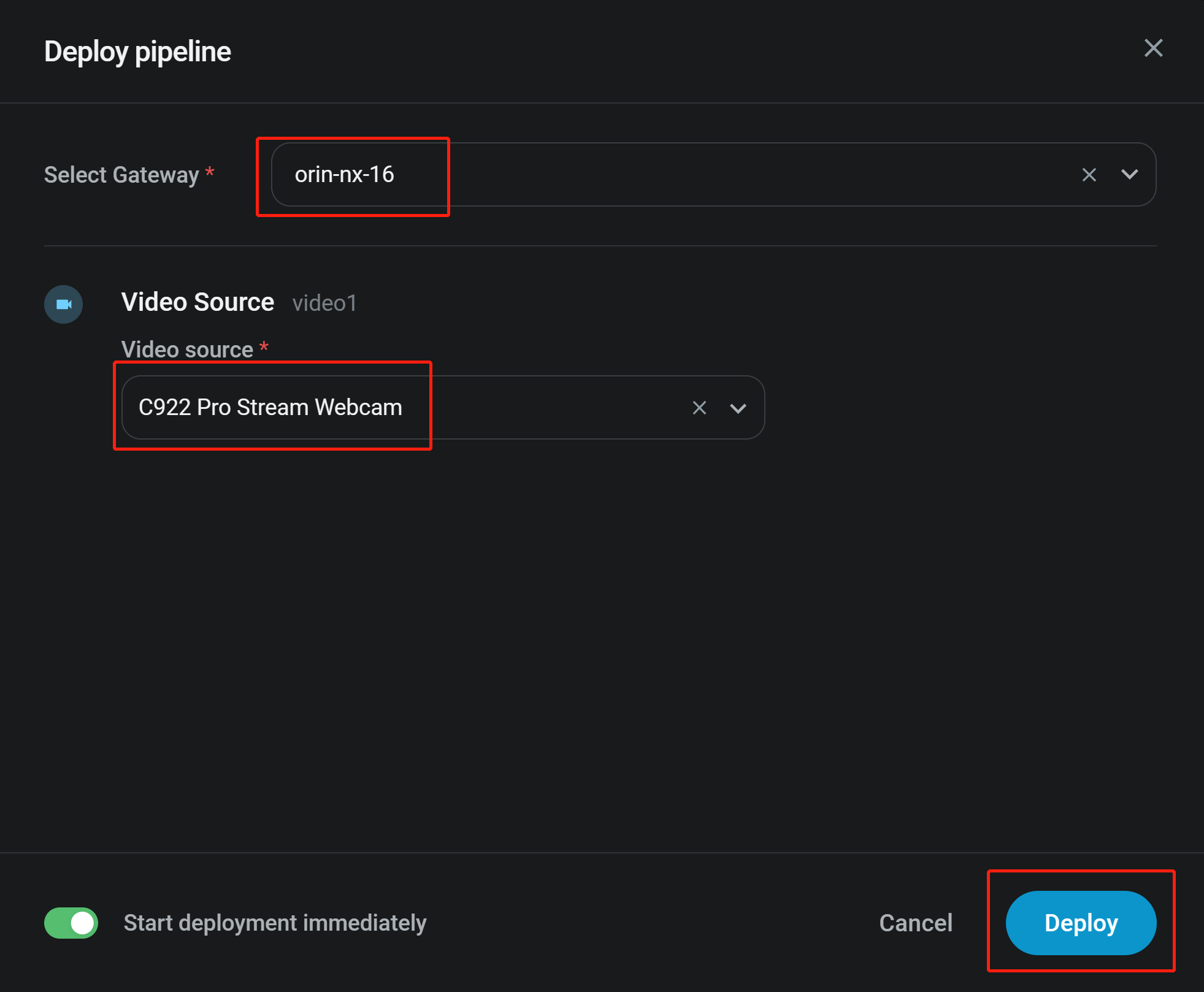
| Lumeo Lumeo is a no-code video analytics platform that enables you to rapidly design, deploy, and monitor custom video analytics and other vision-AI enabled applications. Learn more > Getting Started with Lumeo on NVIDIA® Jetson Devices > |
+ |
 |
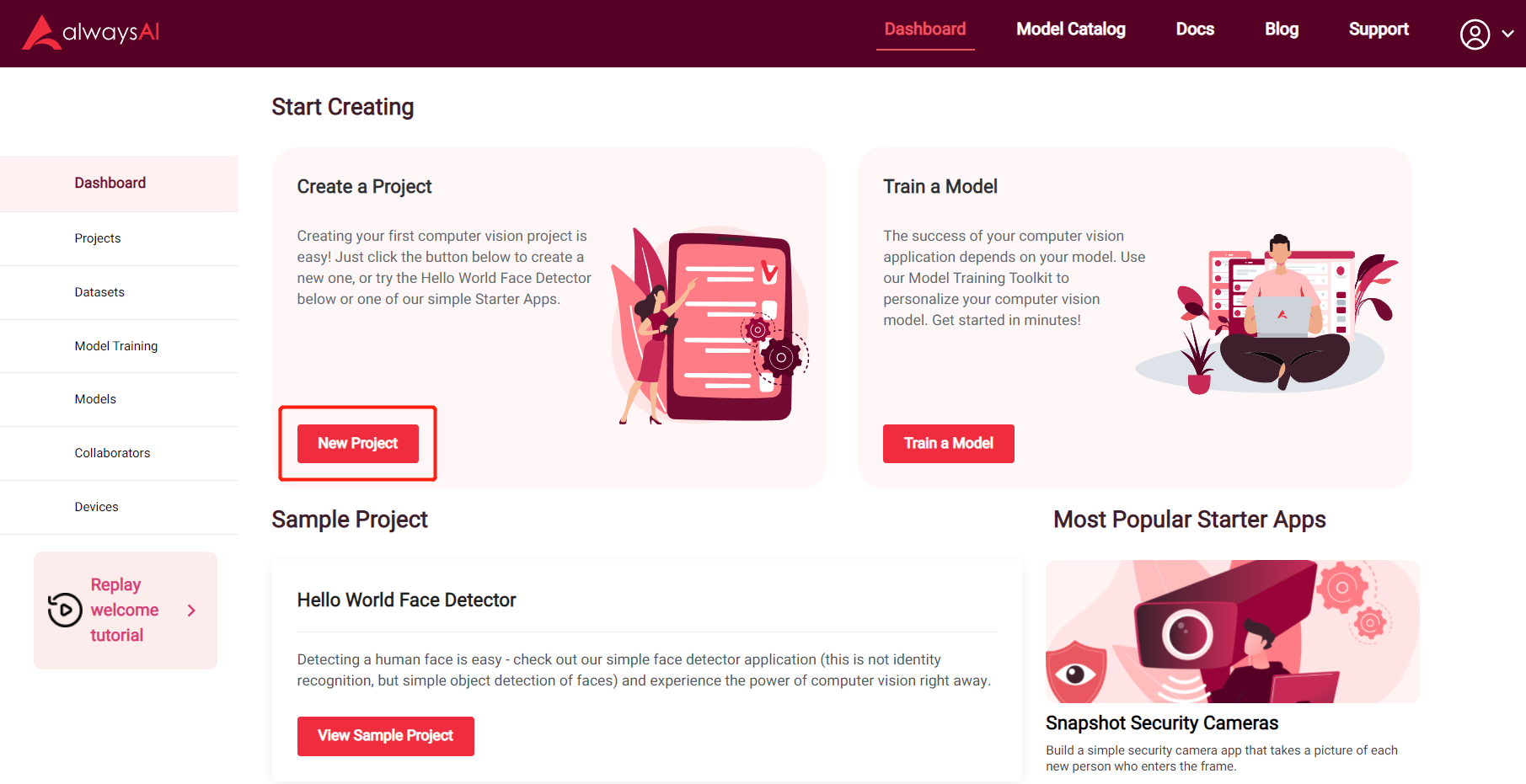
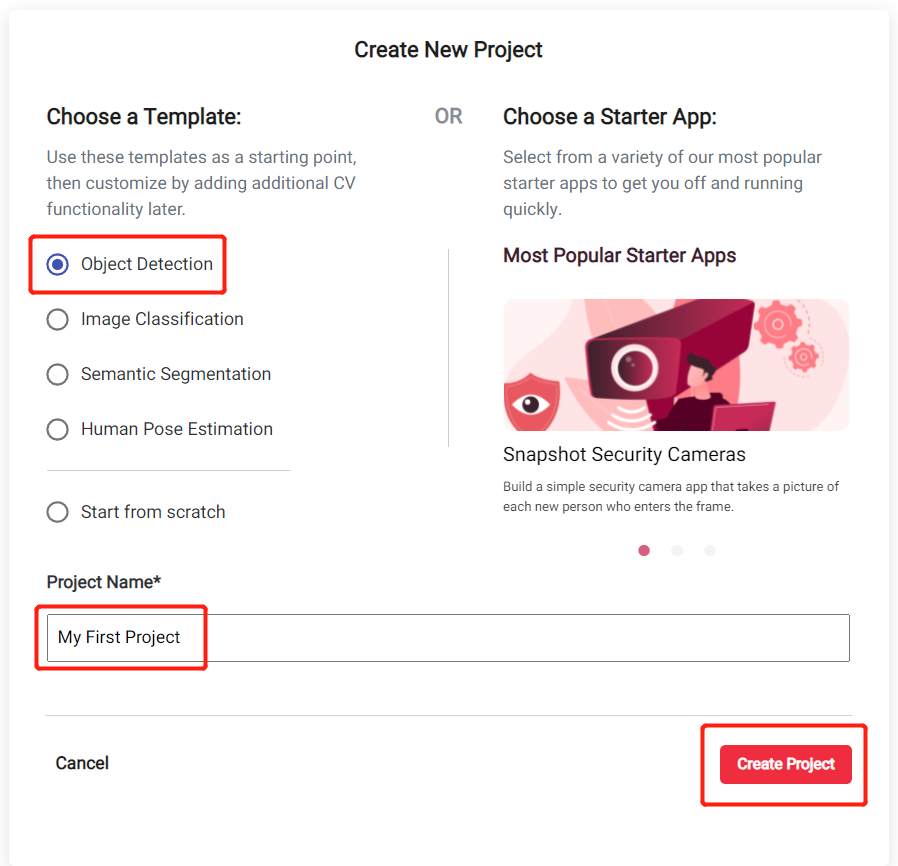
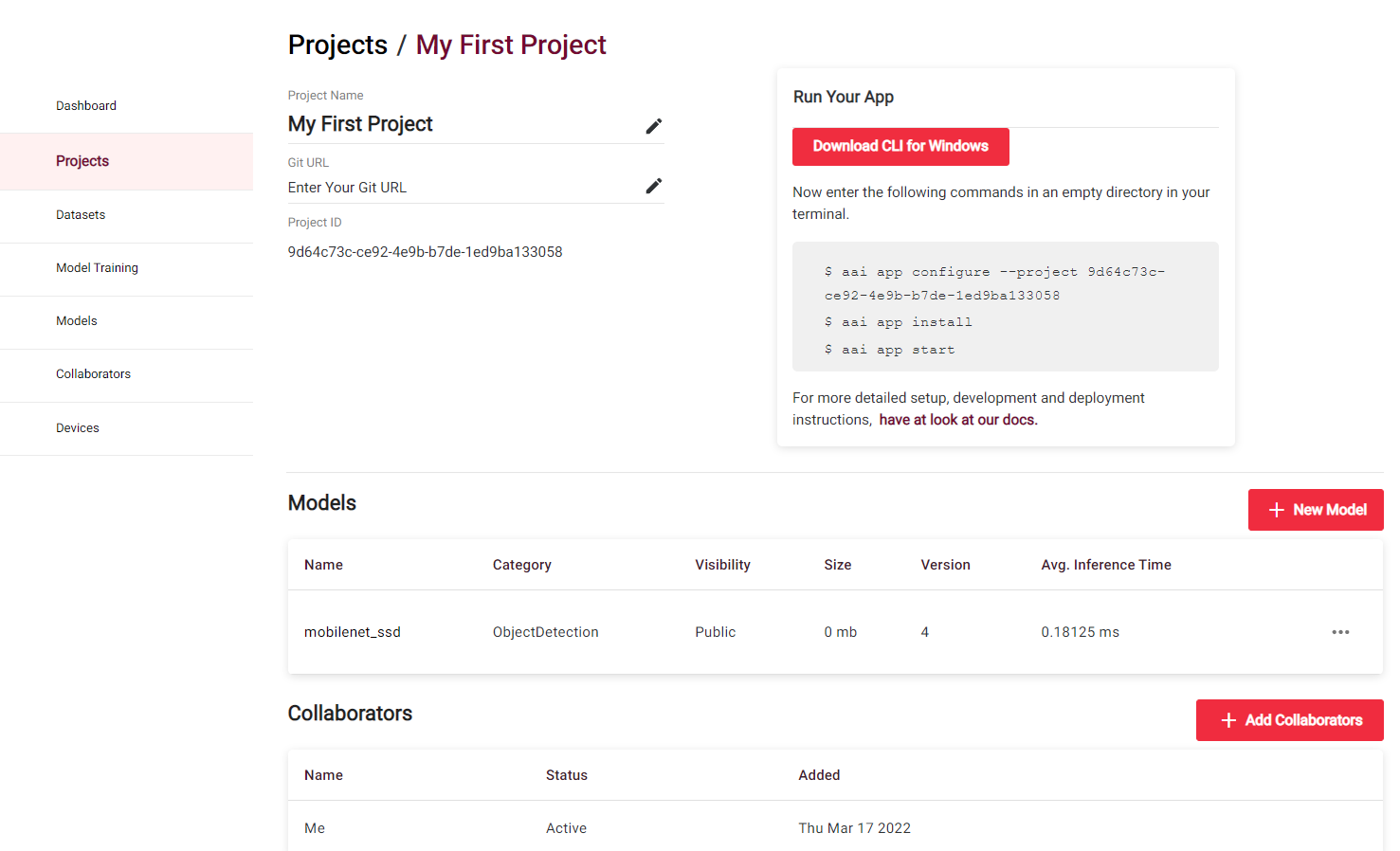
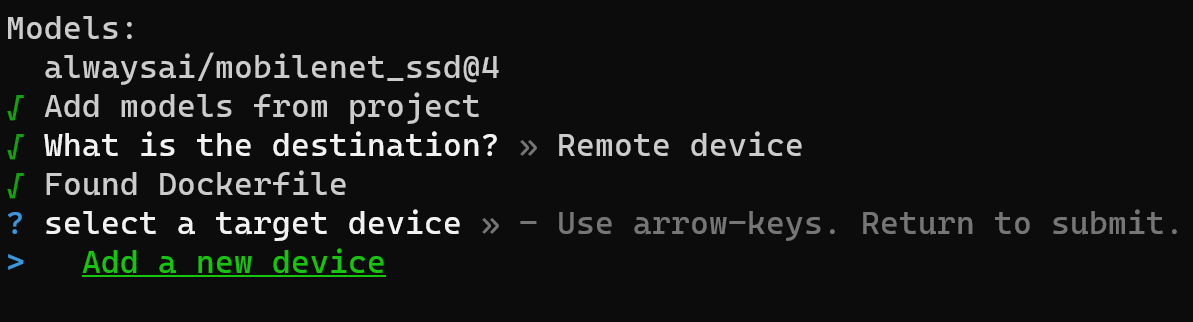
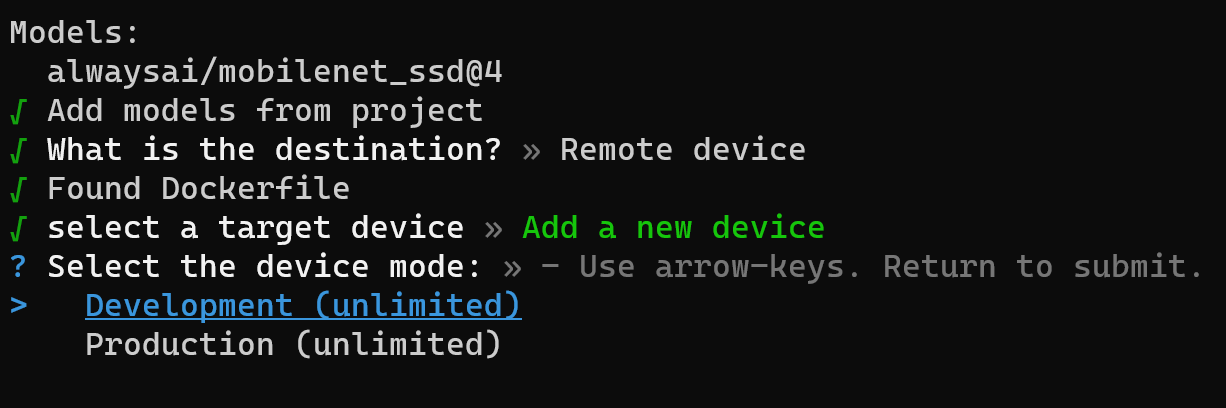
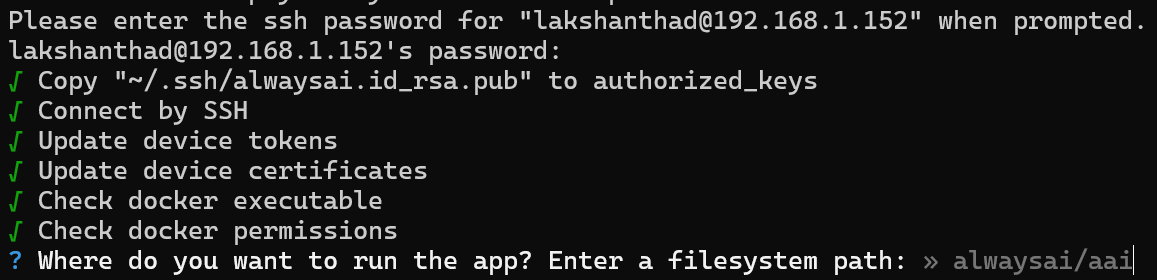
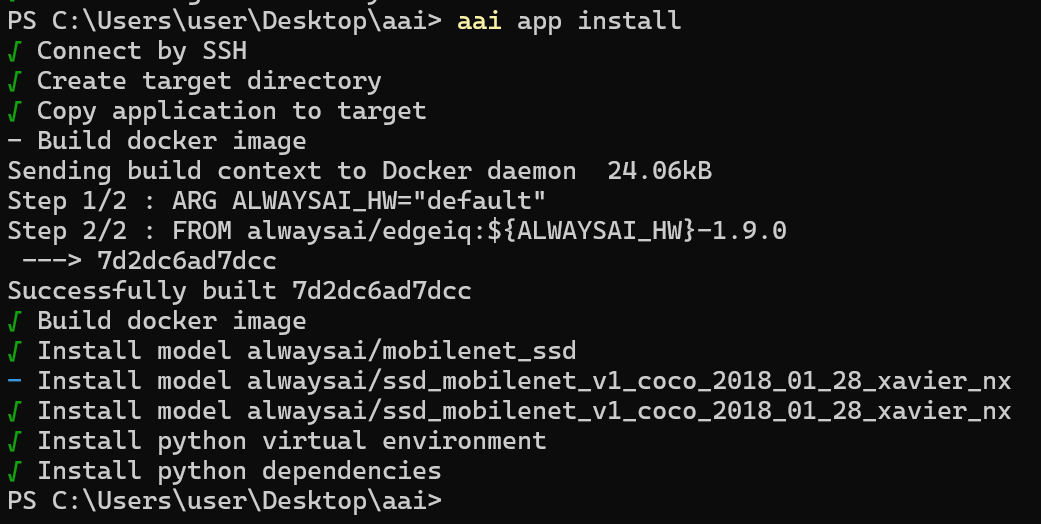
+ alwaysAI alwaysAI provides developers and enterprises a comprehensive platform for building, deploying and managing Computer Vision applications on IoT devices. Learn more > Getting Started with alwaysAI on NVIDIA® Jetson Devices > |
+
| YOLOv8 Ultralytics YOLOv8 is a cutting-edge, state-of-the-art (SOTA) model that builds upon the success of previous YOLO versions and introduces new features and improvements to further boost performance and flexibility. YOLOv8 is designed to be fast, accurate, and easy to use, making it an excellent choice for a wide range of object detection and tracking, instance segmentation, image classification and pose estimation tasks. Learn more > Deploy YOLOv8 on NVIDIA Jetson using TensorRT and DeepStream SDK > |
+ |
 |
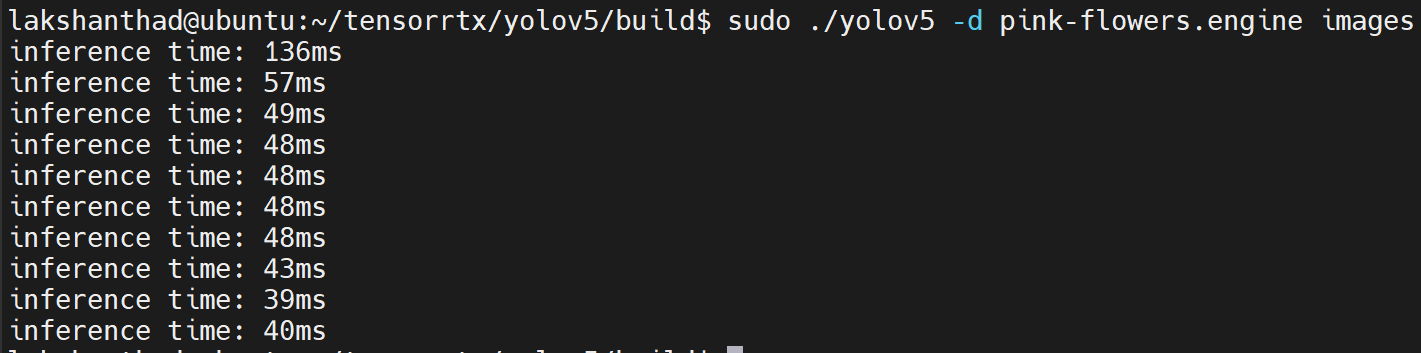
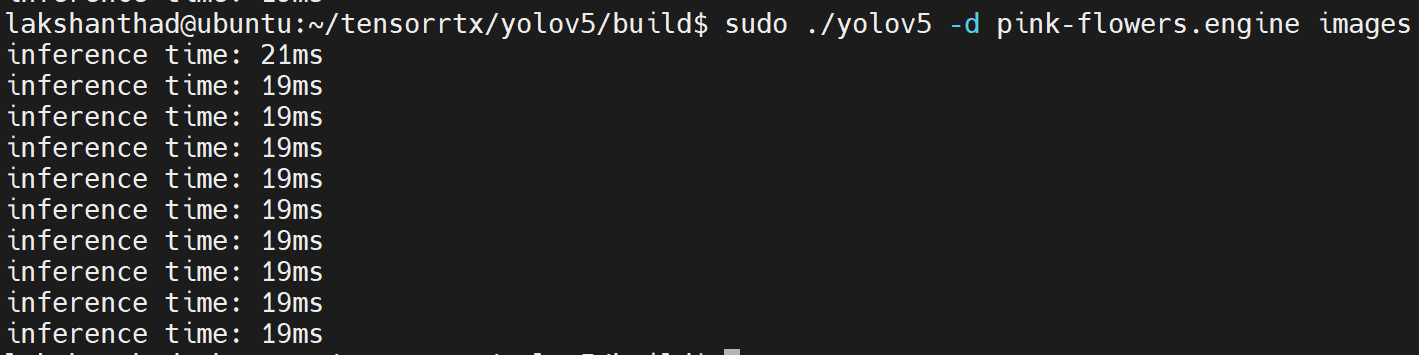
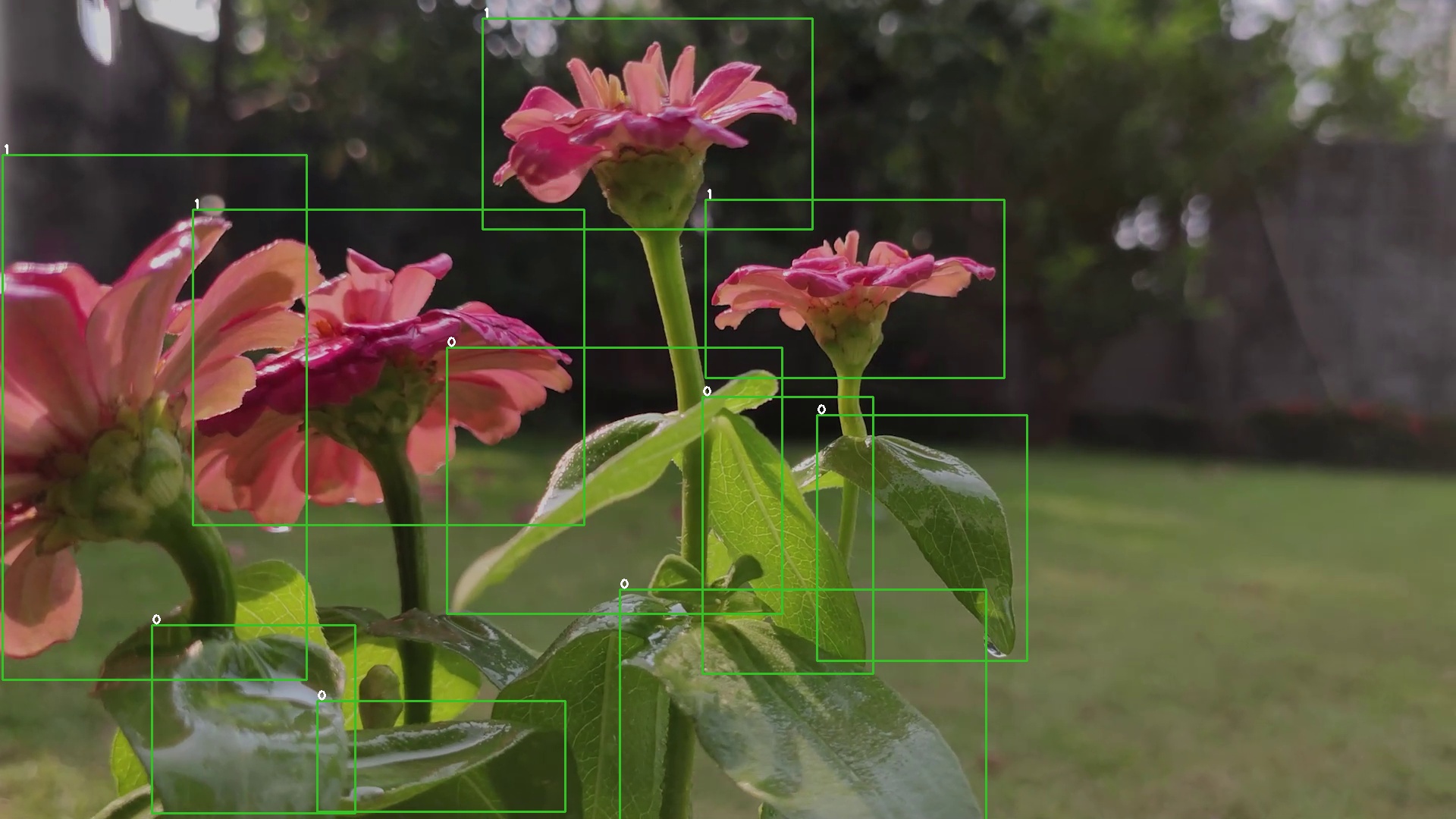
+ YOLOv5 YOLO is an abbreviation for the term ‘You Only Look Once’. It is an algorithm that detects and recognizes various objects in an image in real-time. YOLOv5 🚀 is a family of compound-scaled object detection models trained on the COCO dataset, and includes simple functionality for Test Time Augmentation (TTA), model ensembling, hyperparameter evolution, and export to ONNX, CoreML and TFLite. Learn more > Few-Shot Object Detection with YOLOv5 and Roboflow > |
+
 |
+ roboflow Roboflow lets you annotate images super fast, right within your browser. Easily train and deploy a working computer vision model even if you are not a machine learning exper. Learn more > Few-Shot Object Detection with YOLOv5 and Roboflow > Road signs detection using YOLOv5 and Ultralytics HUB > Wildfire Smoke Detection using YOLOv5 and Roboflow on NVIDIA Jetson > |
+
 |
+ Allxon Allxon is an essential edge device management solution that simplifies and optimizes business operations management by bonding together the AI/IoT ecosystem: hardware (IHV), software (ISV), and service providers (SI/MSP). Allxon enables efficient and secure remote hardware management services for the NVIDIA Jetson platform. Learn more > Getting Started with Allxon > |
+
 |
+ Deci Deci builds an end-to-end platform that enables AI developers to build, optimize, and deploy ultra-fast deep learning models on any hardware. You can use pre-optimized models or self-contained models to efficiently train models from scratch, and can automatically optimize hardware for inference performance. Learn more > How to Deploy and Boost Inference on NVIDIA Jetson > Getting Started with Deci on NVIDIA® Jetson Devices > |
+
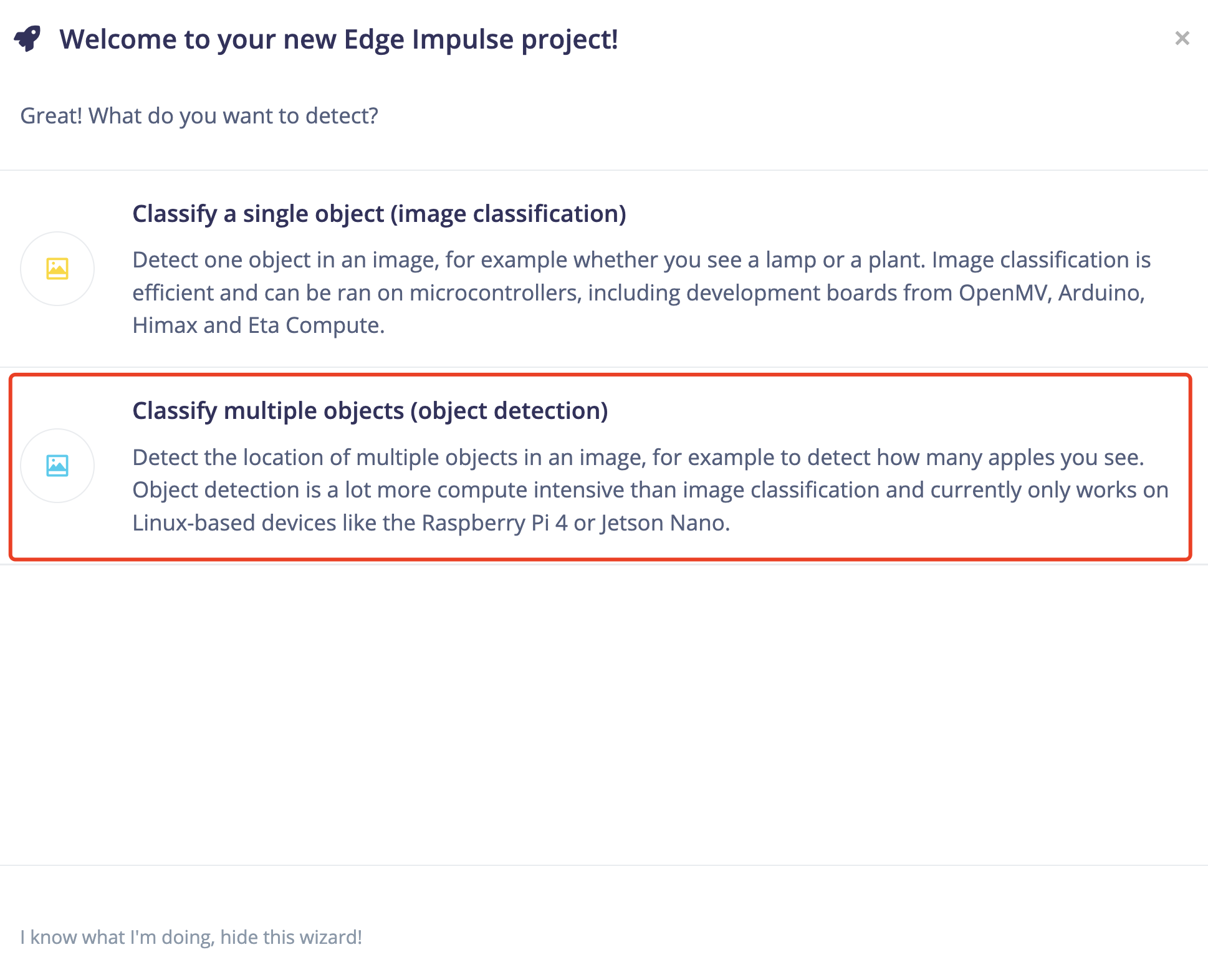
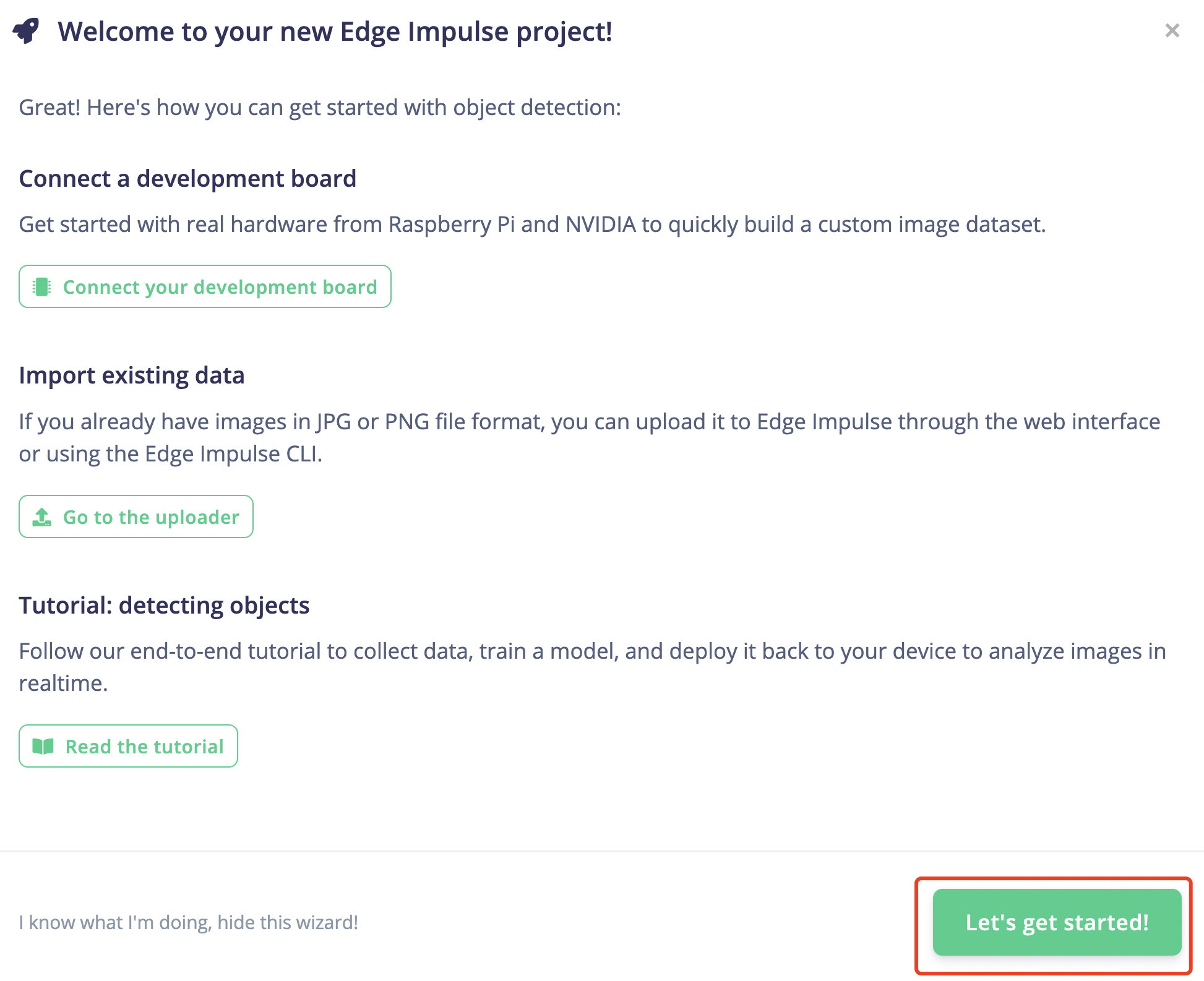
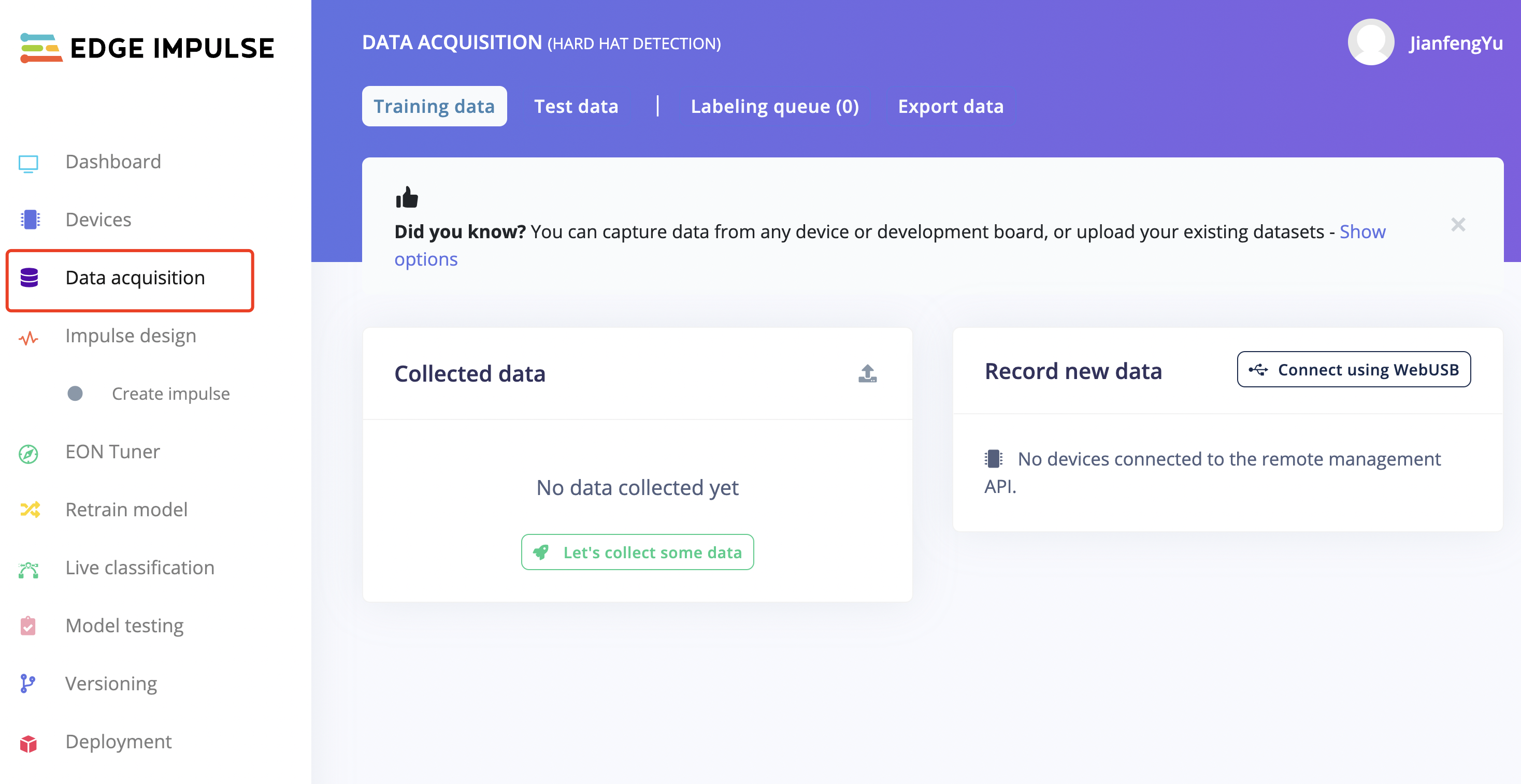
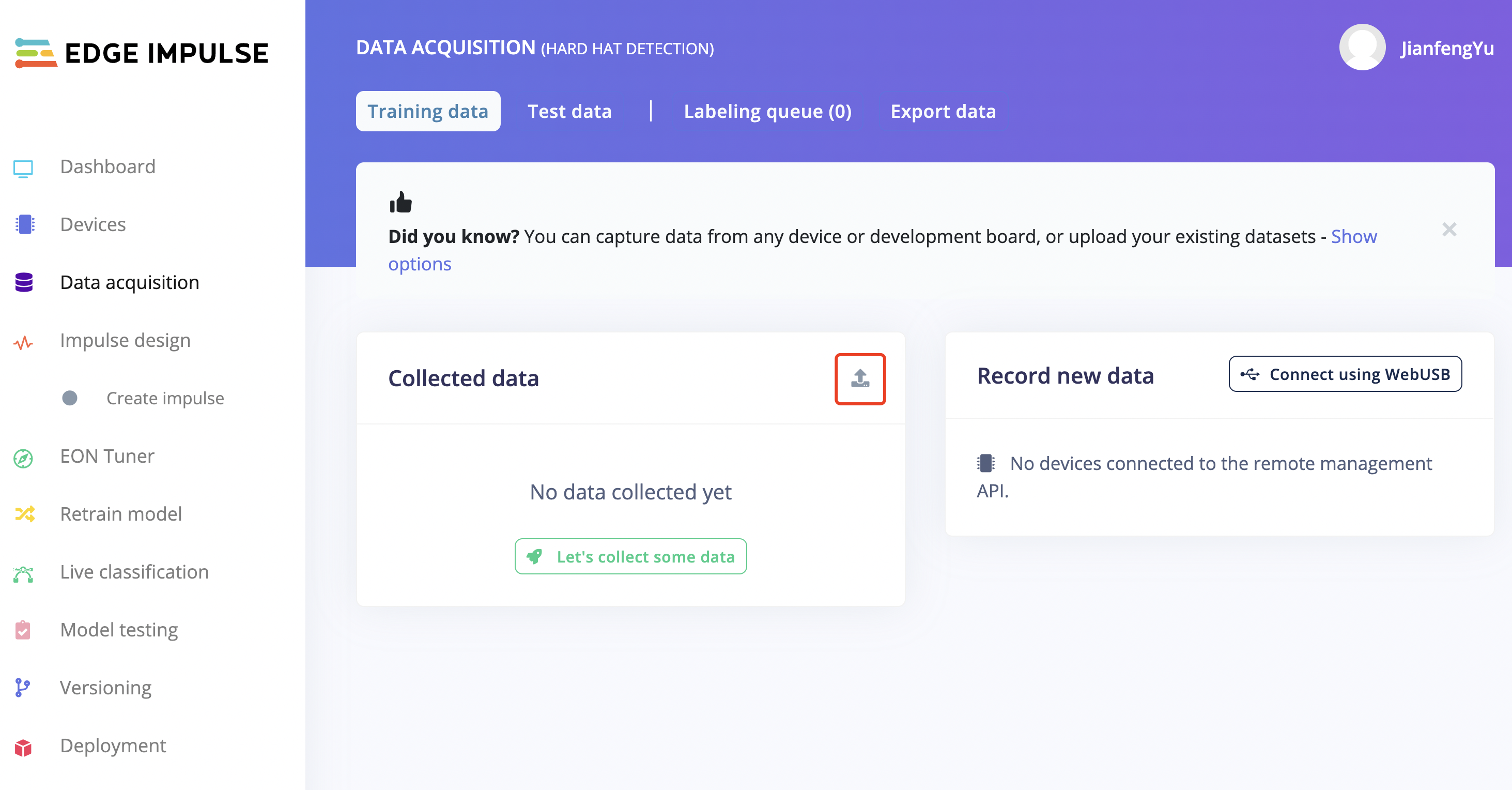
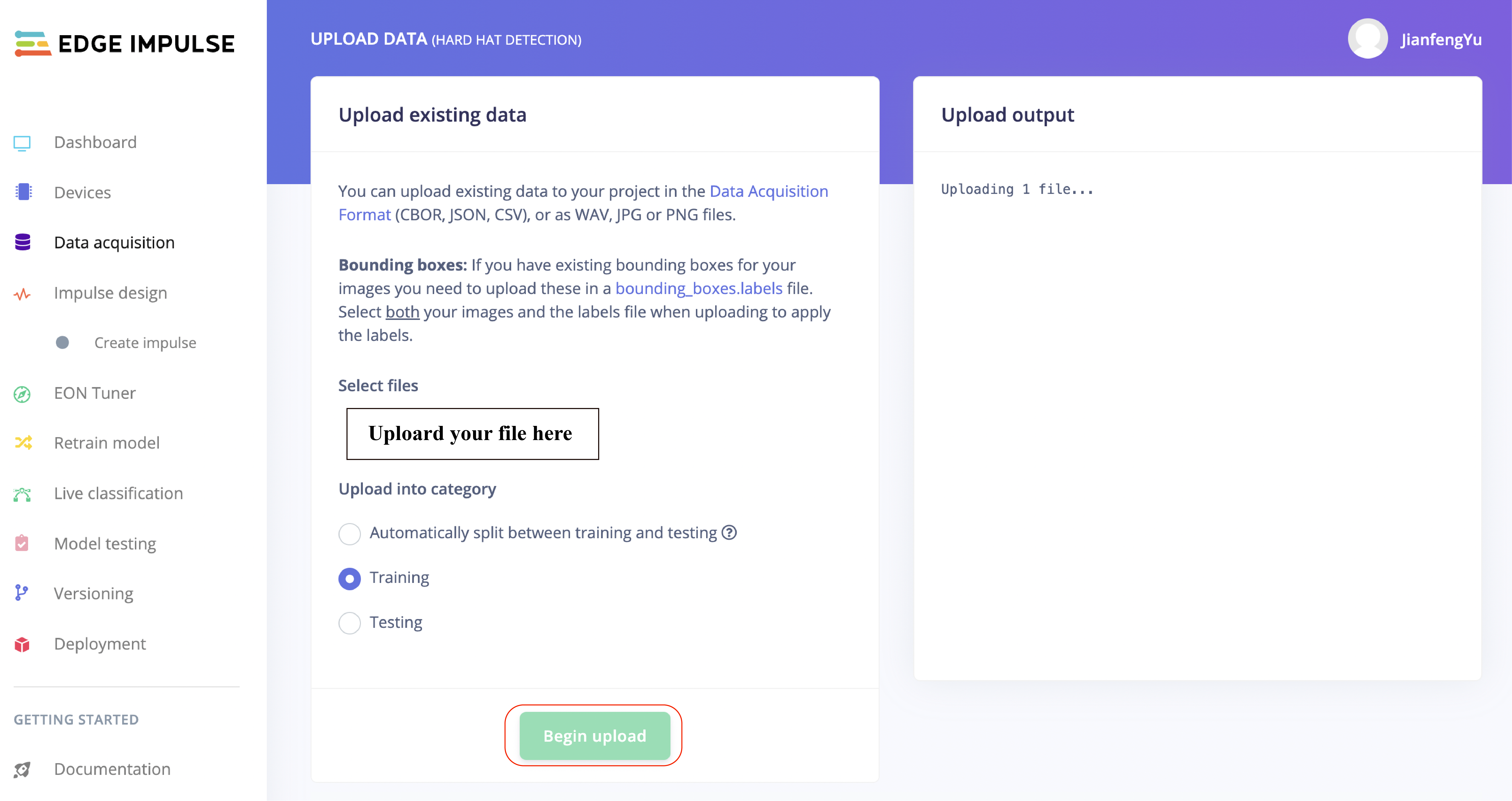
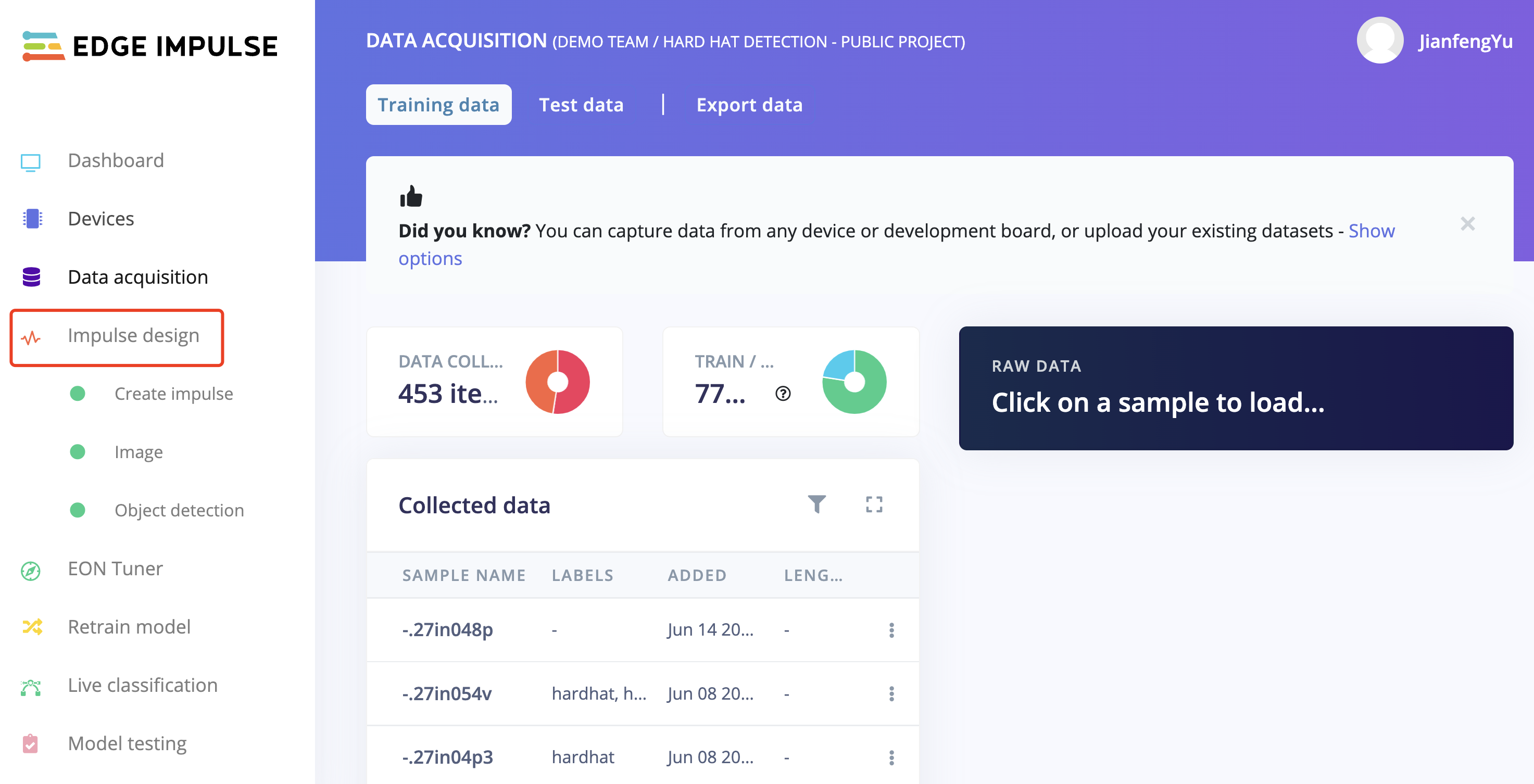
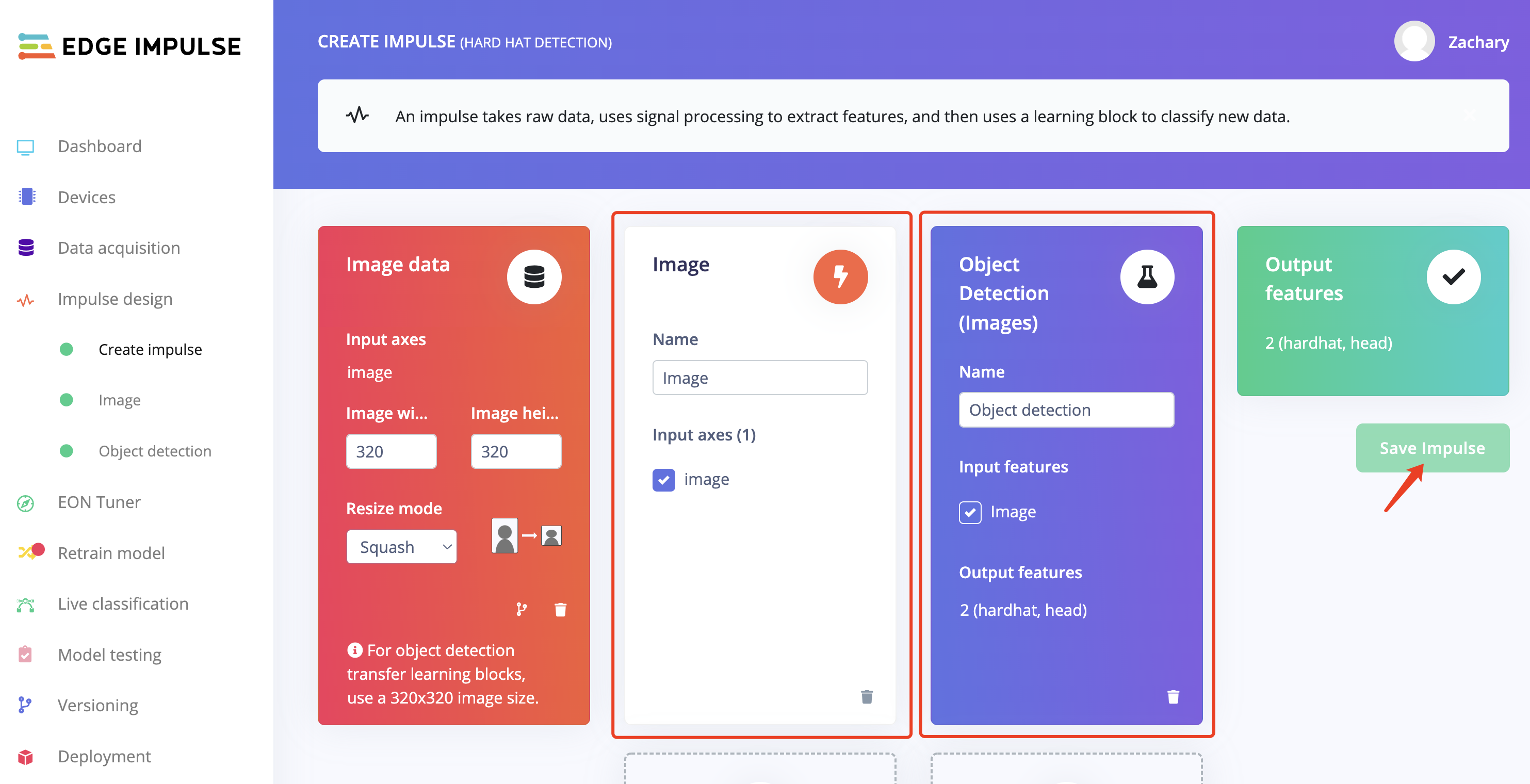
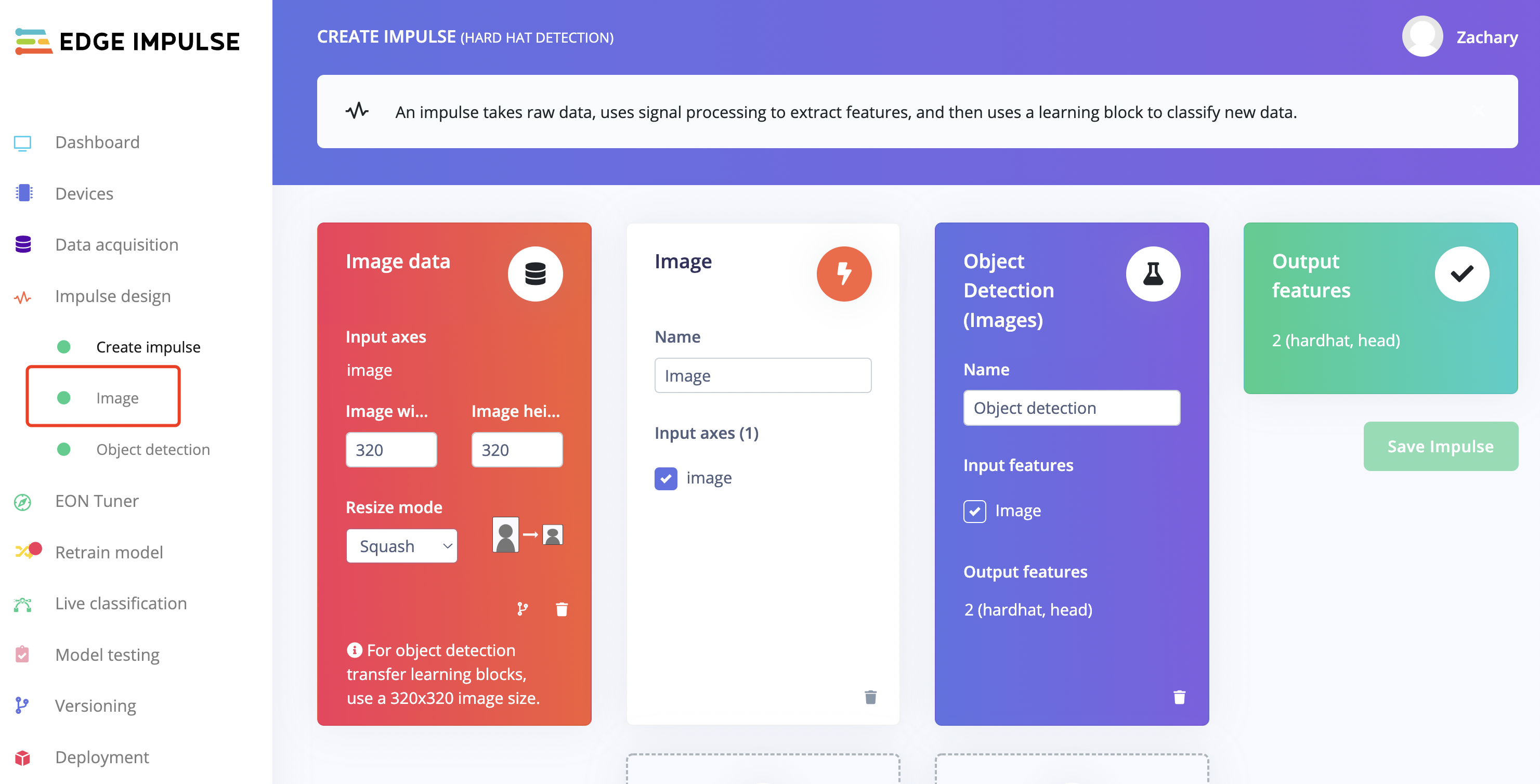
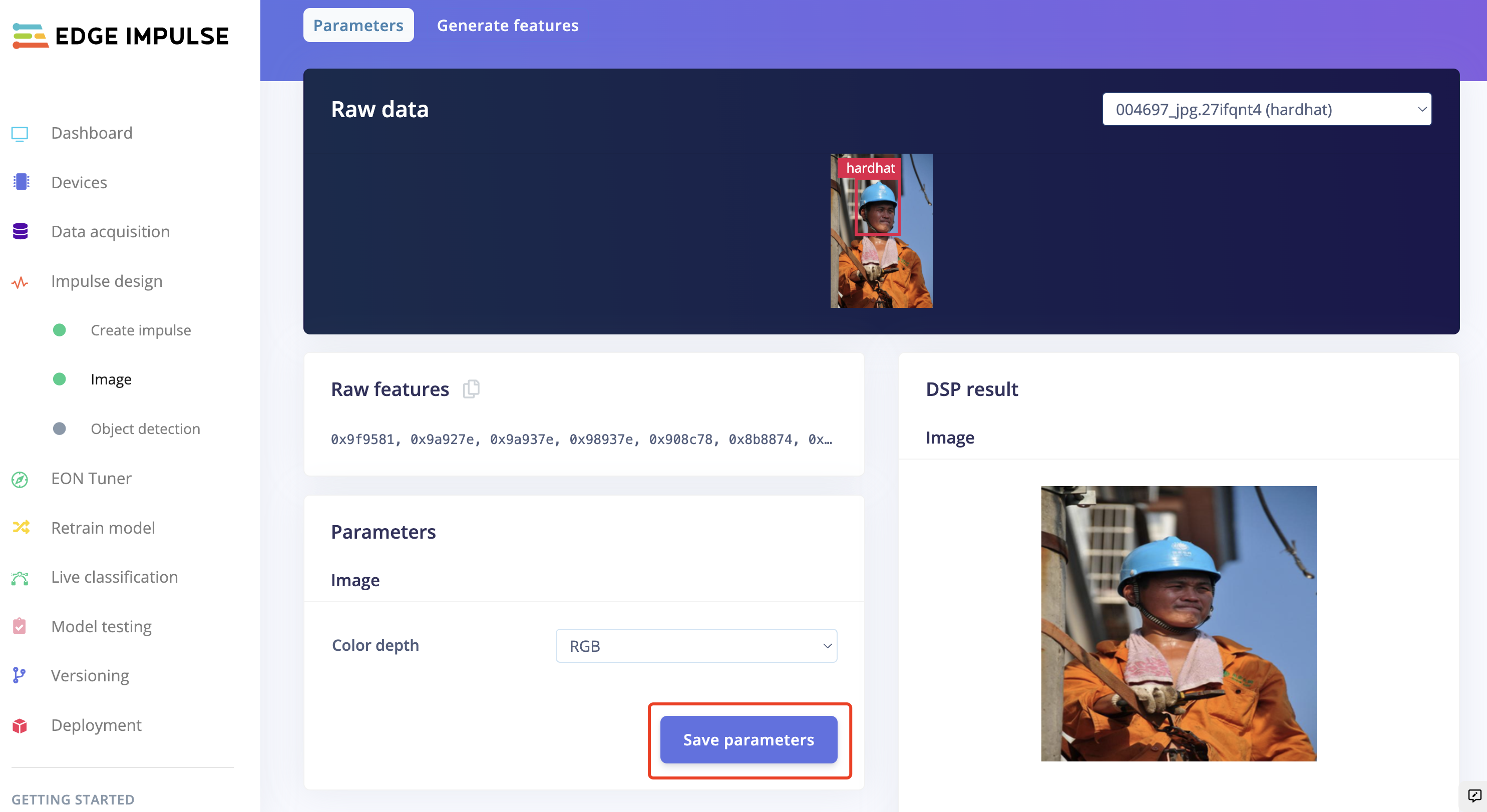
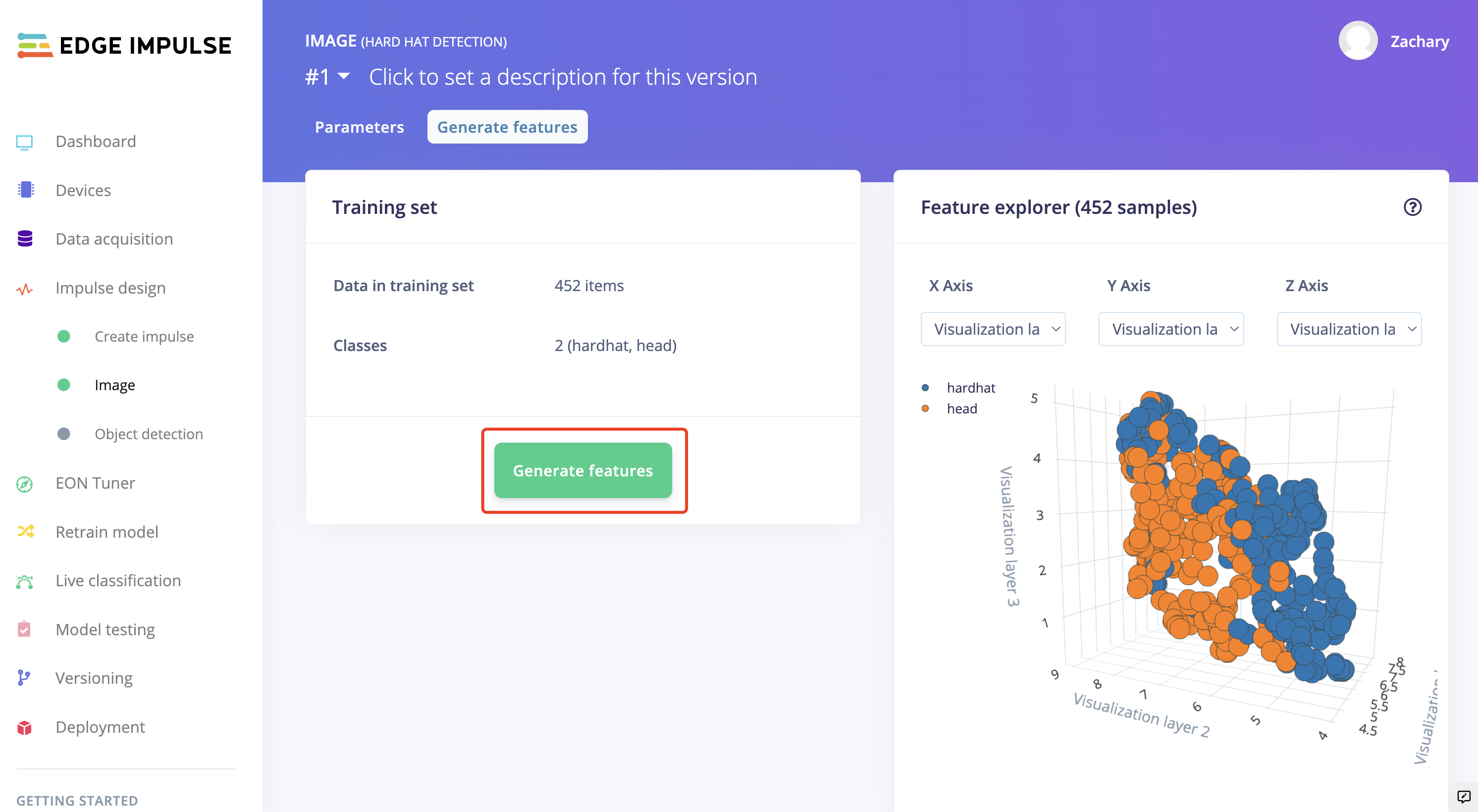
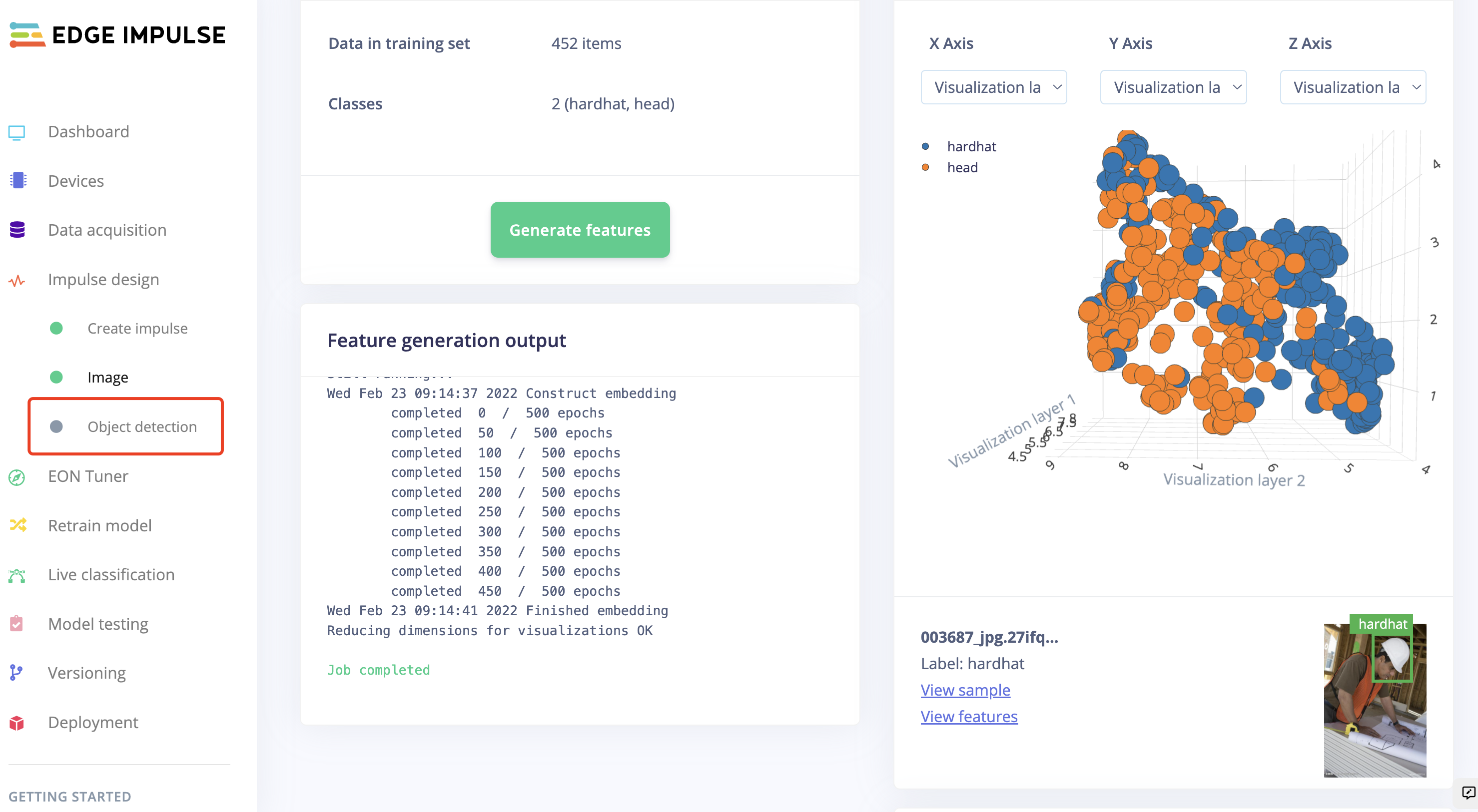
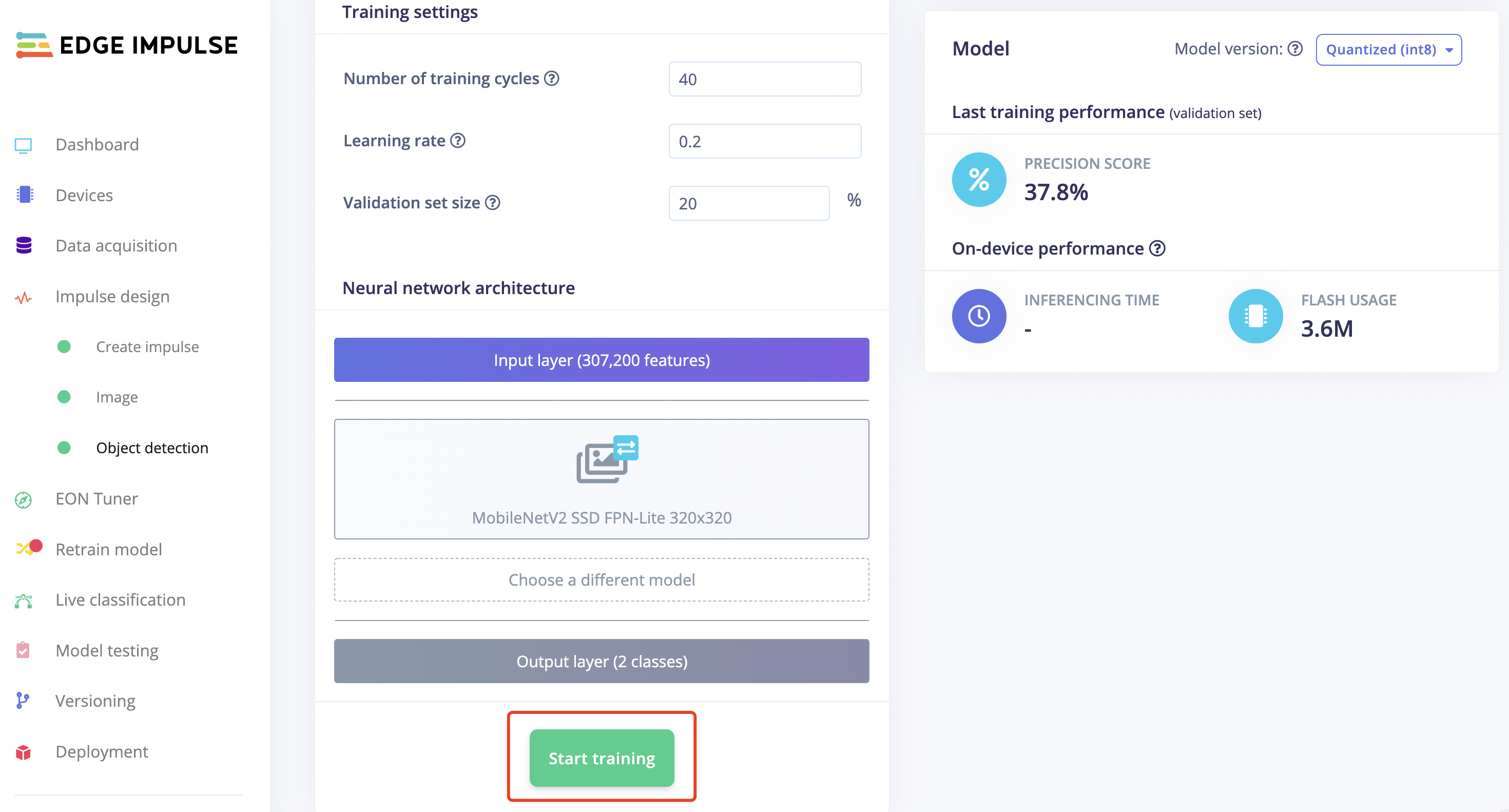
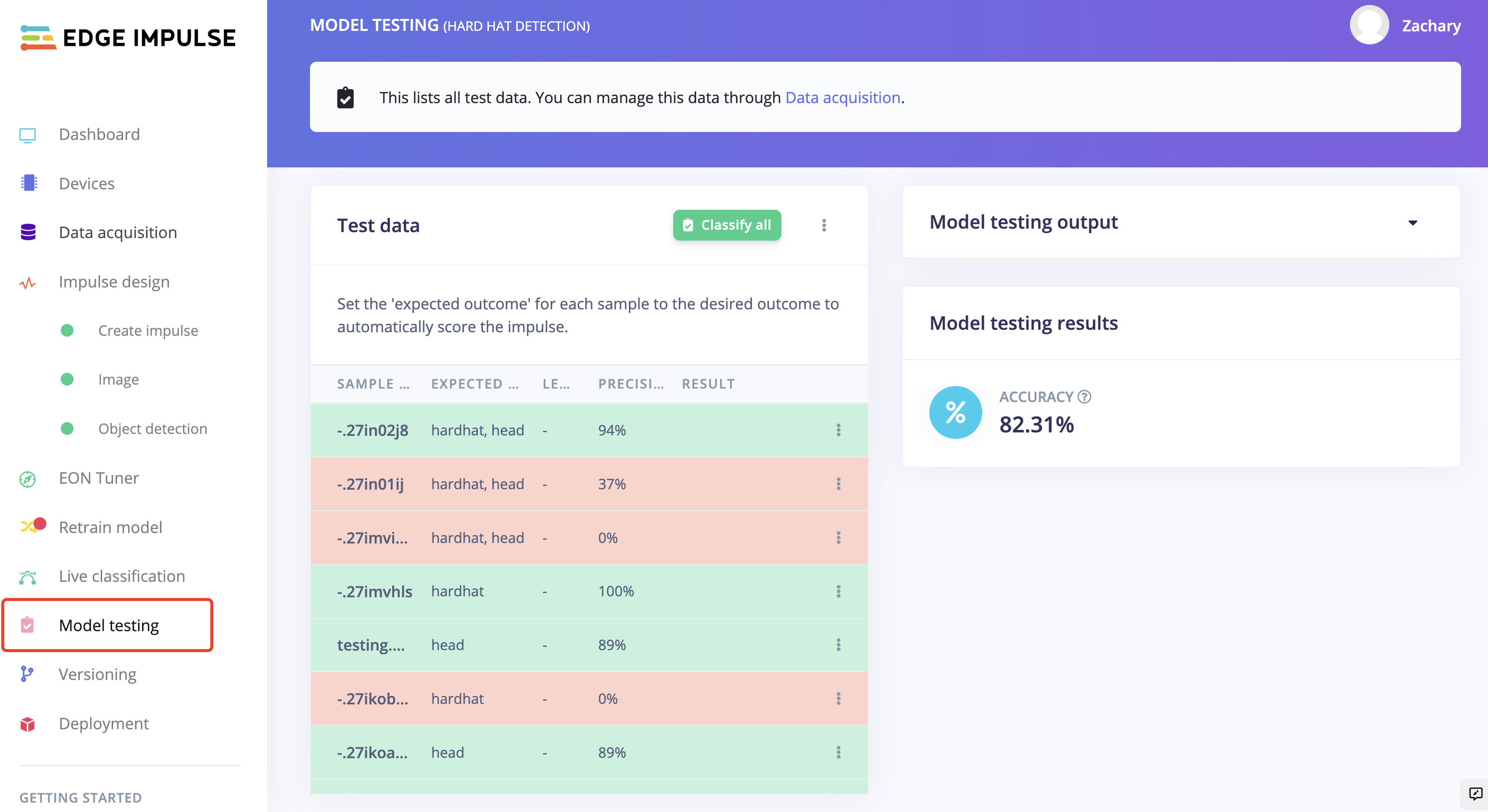
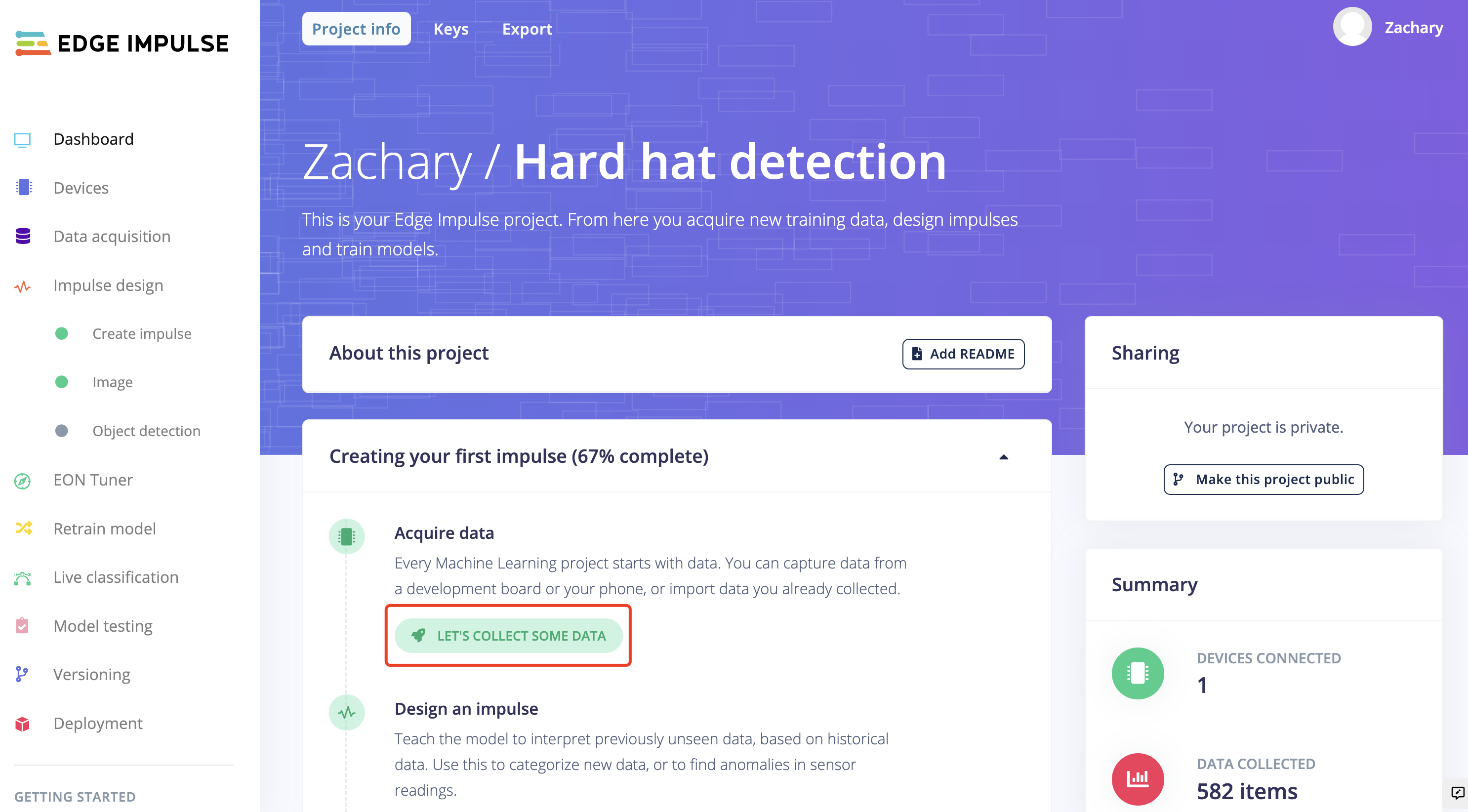
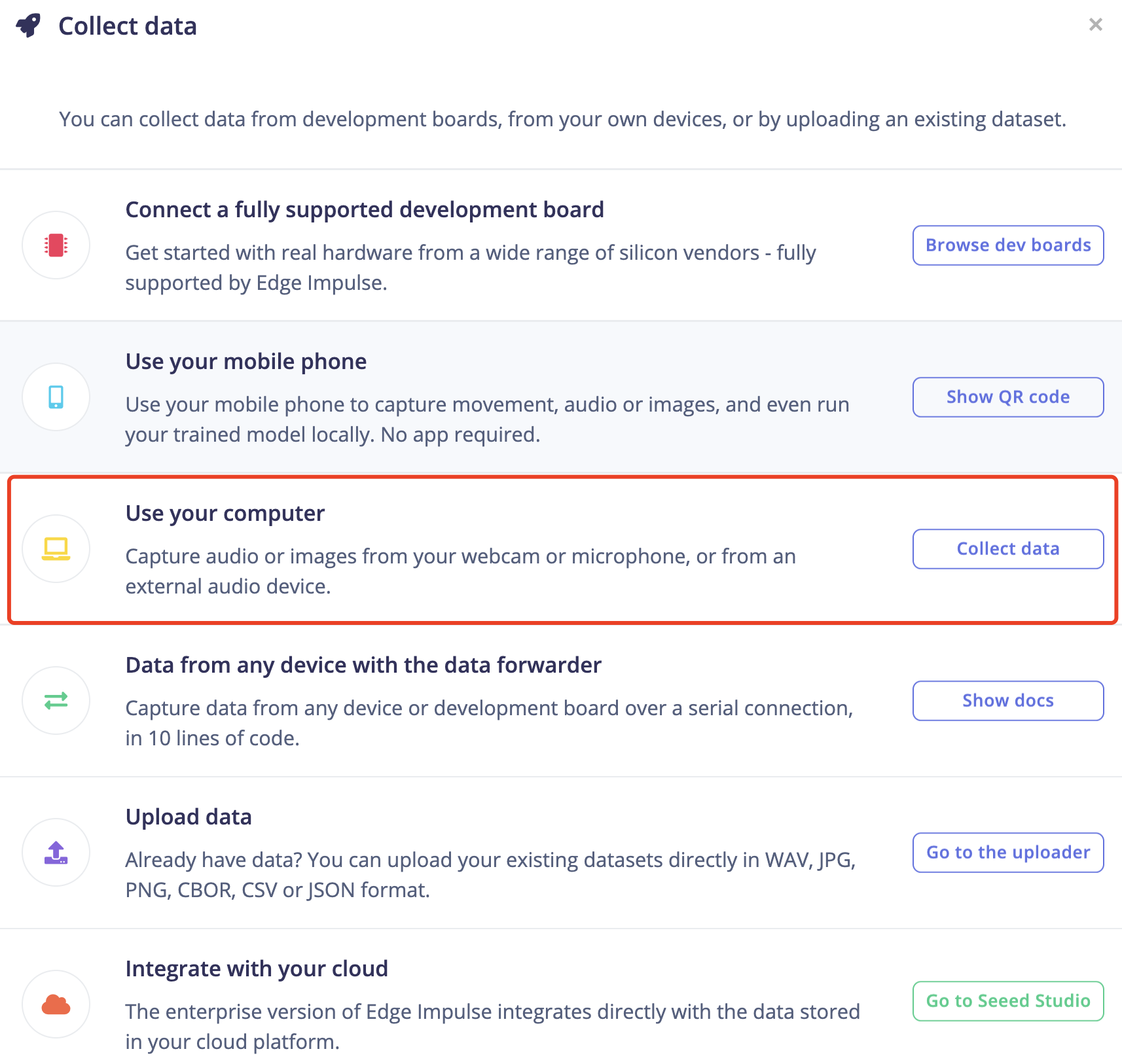
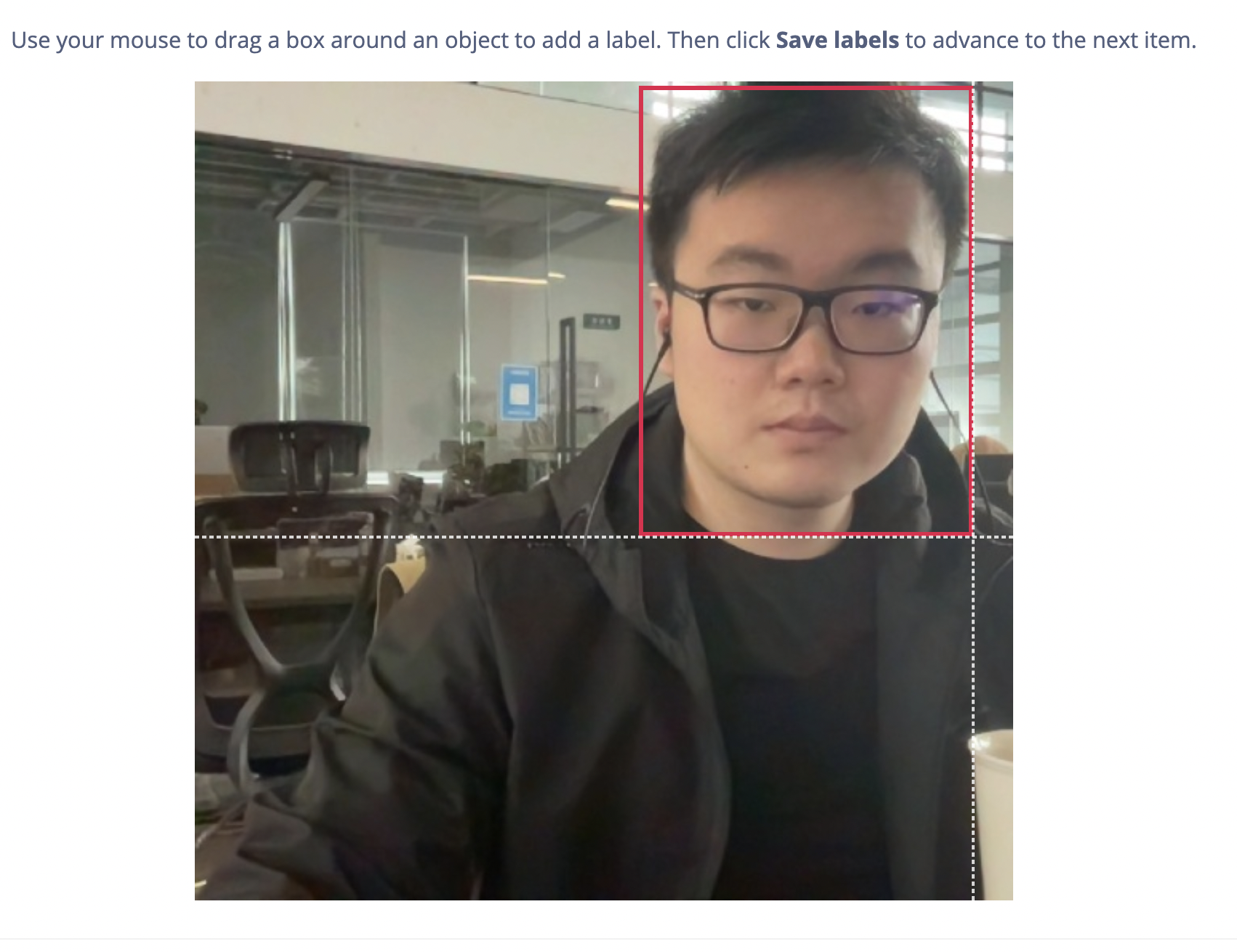
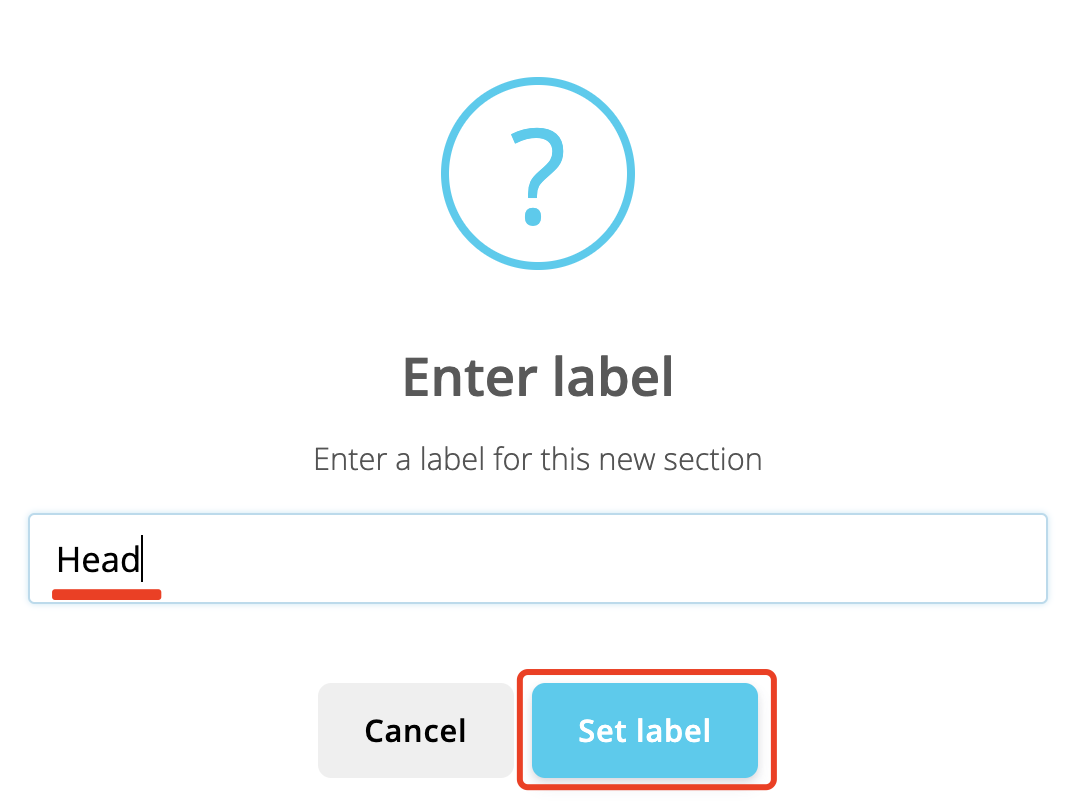
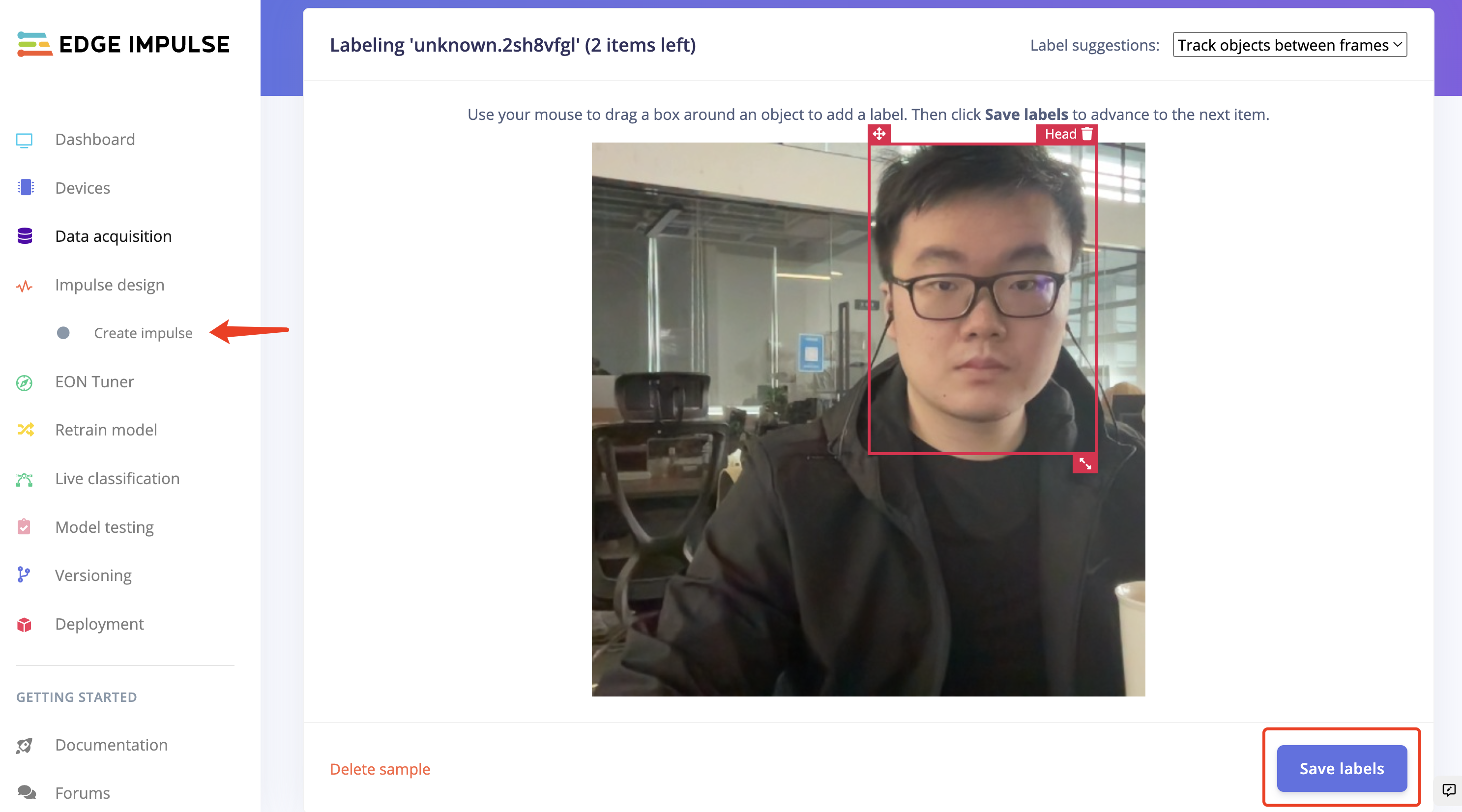
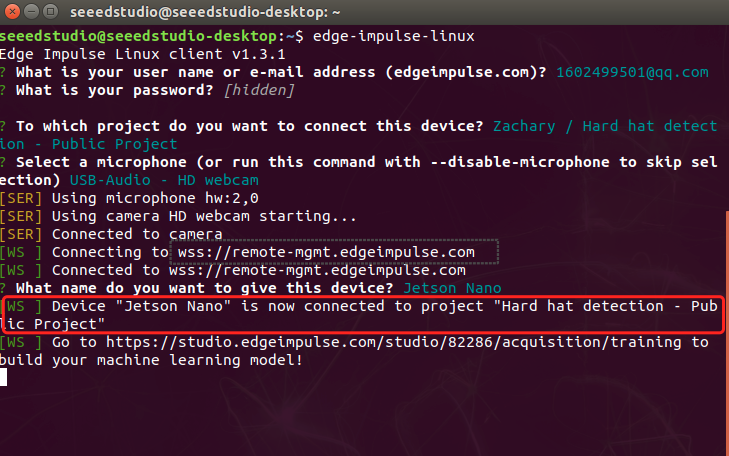
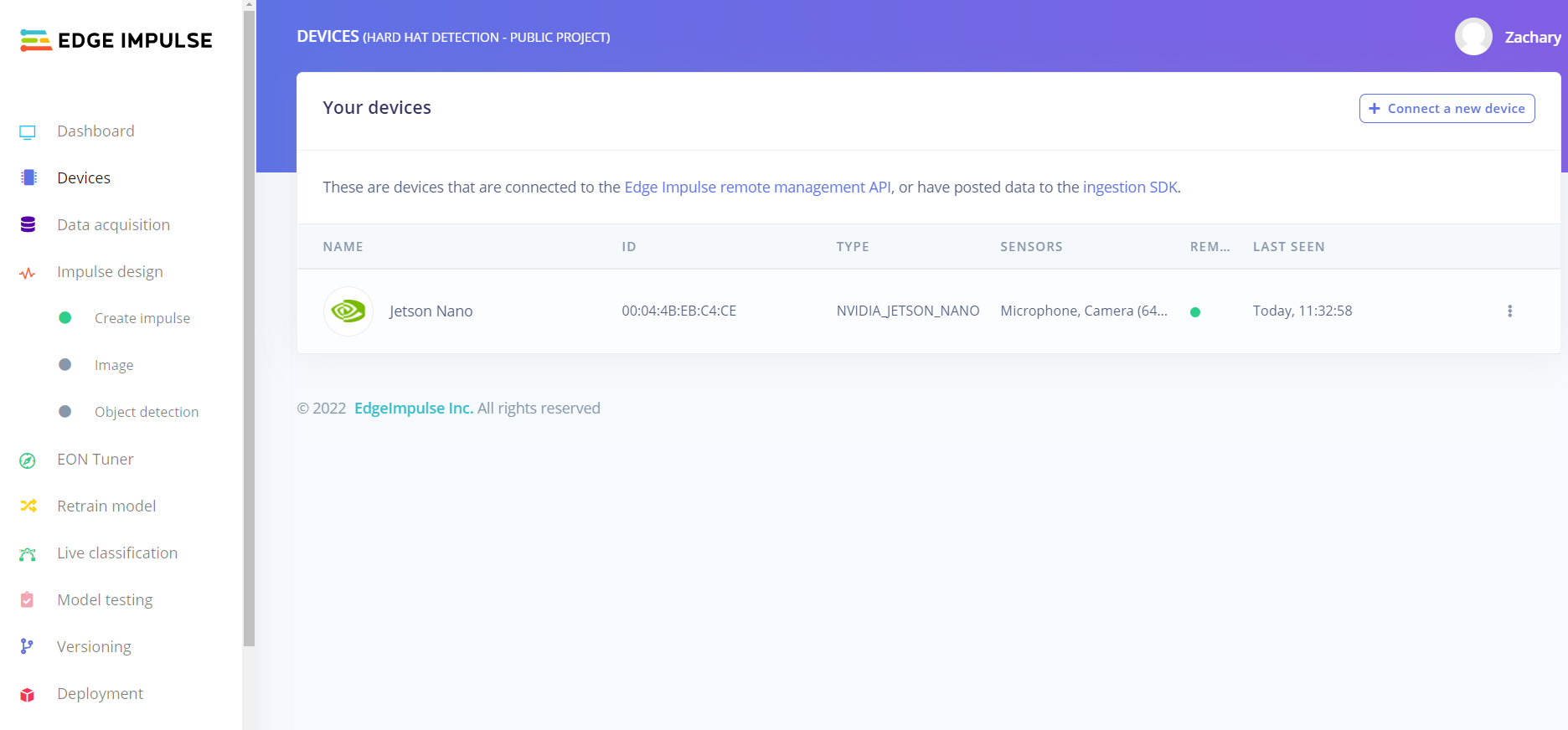
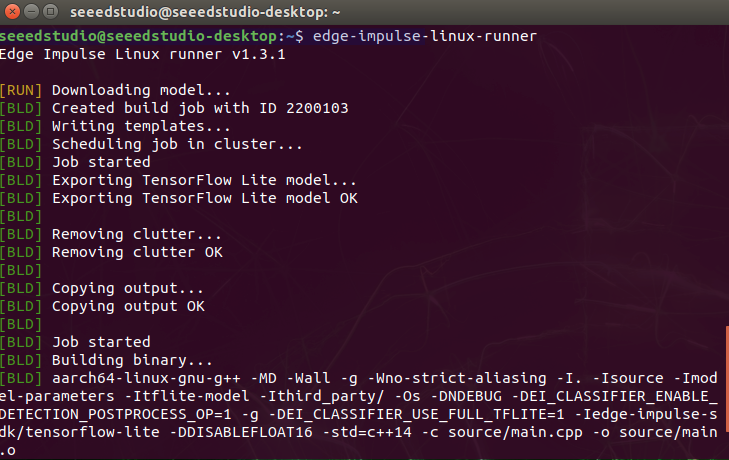
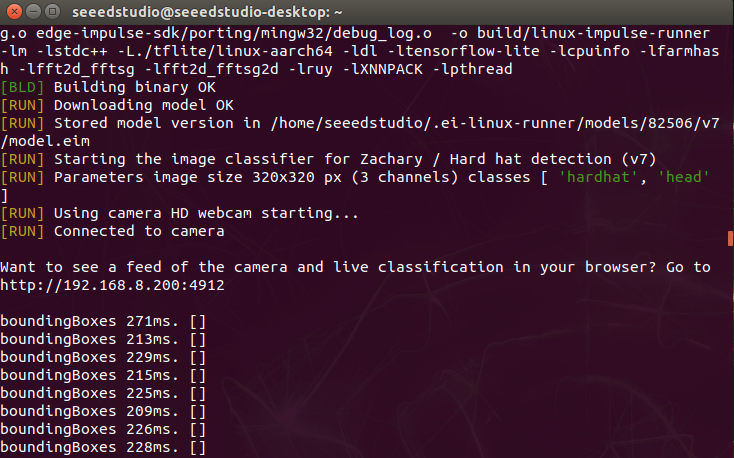
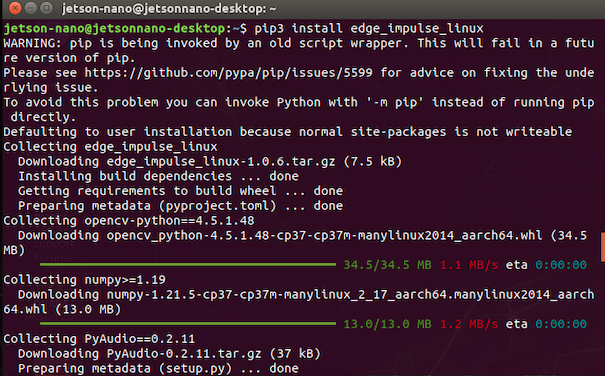
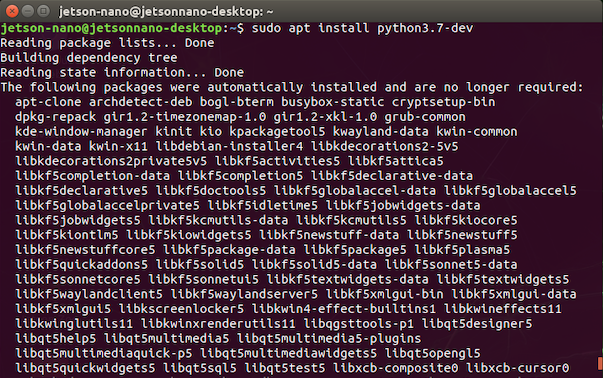
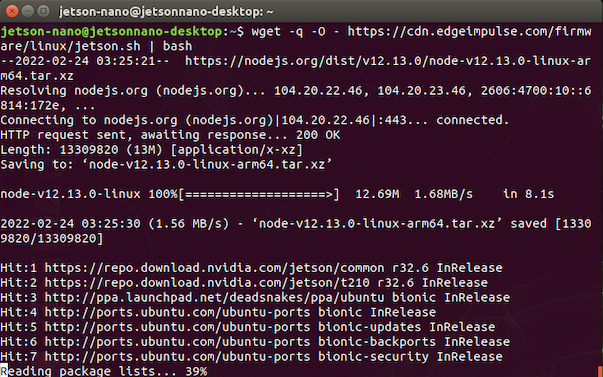
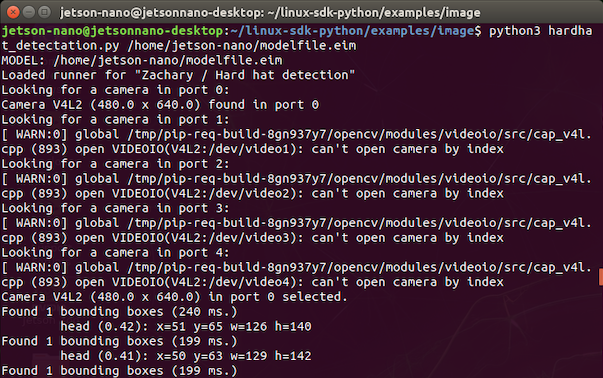
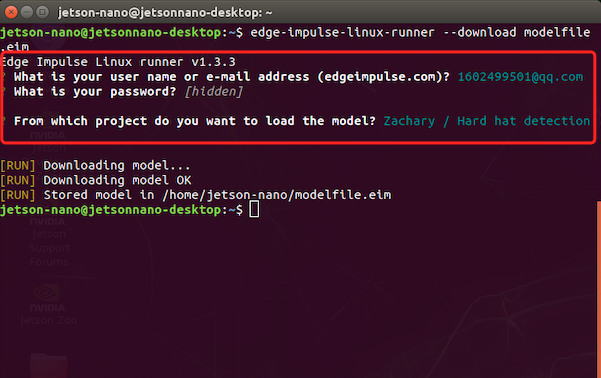
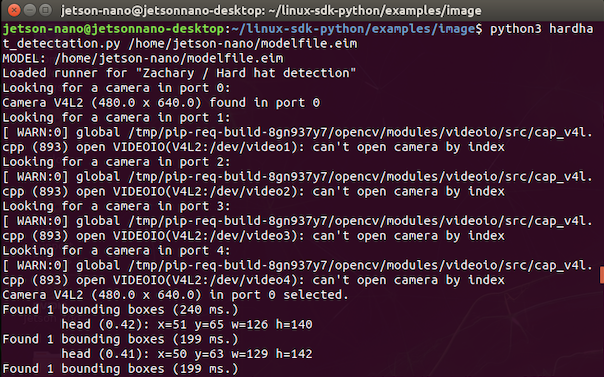
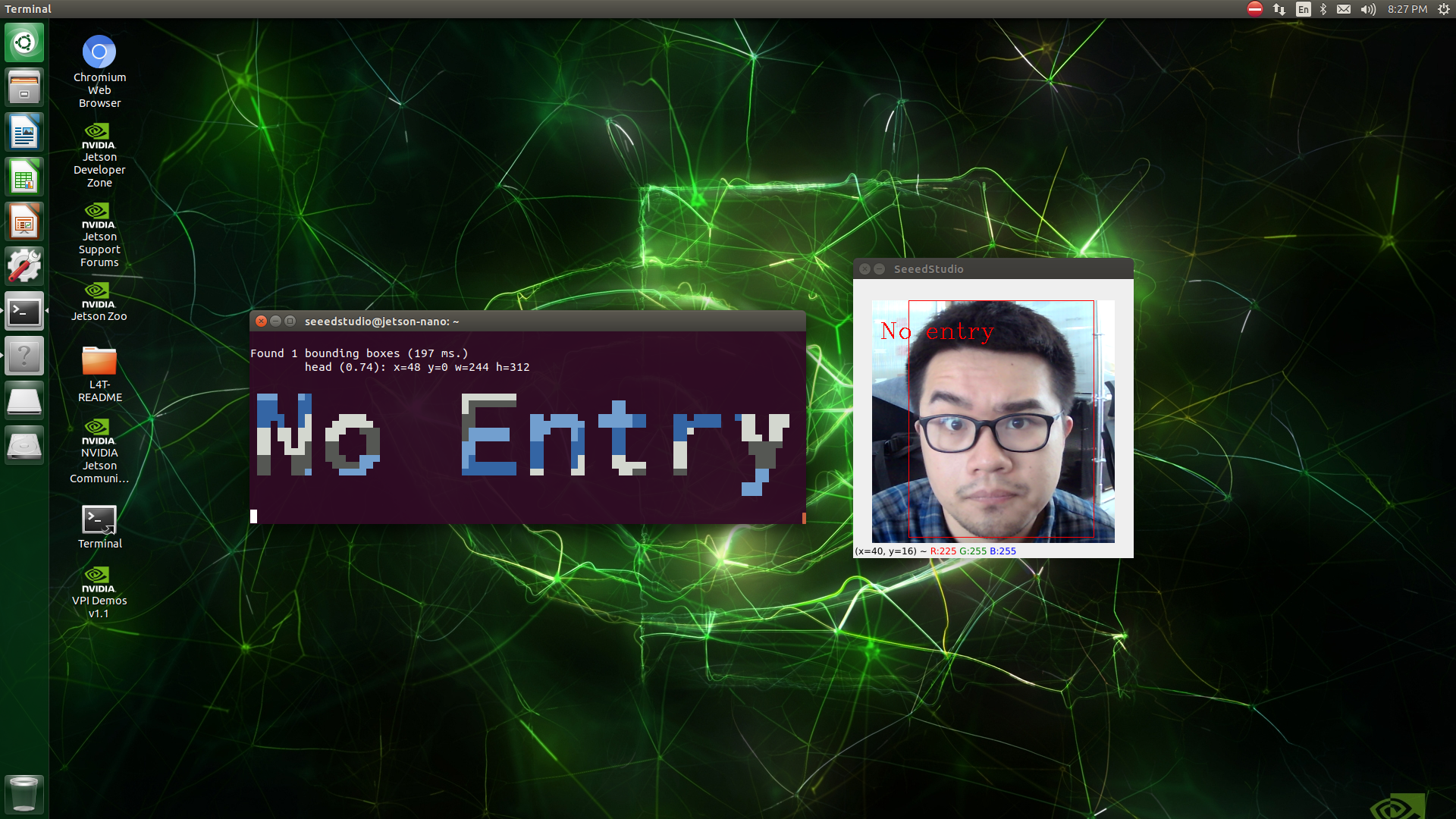
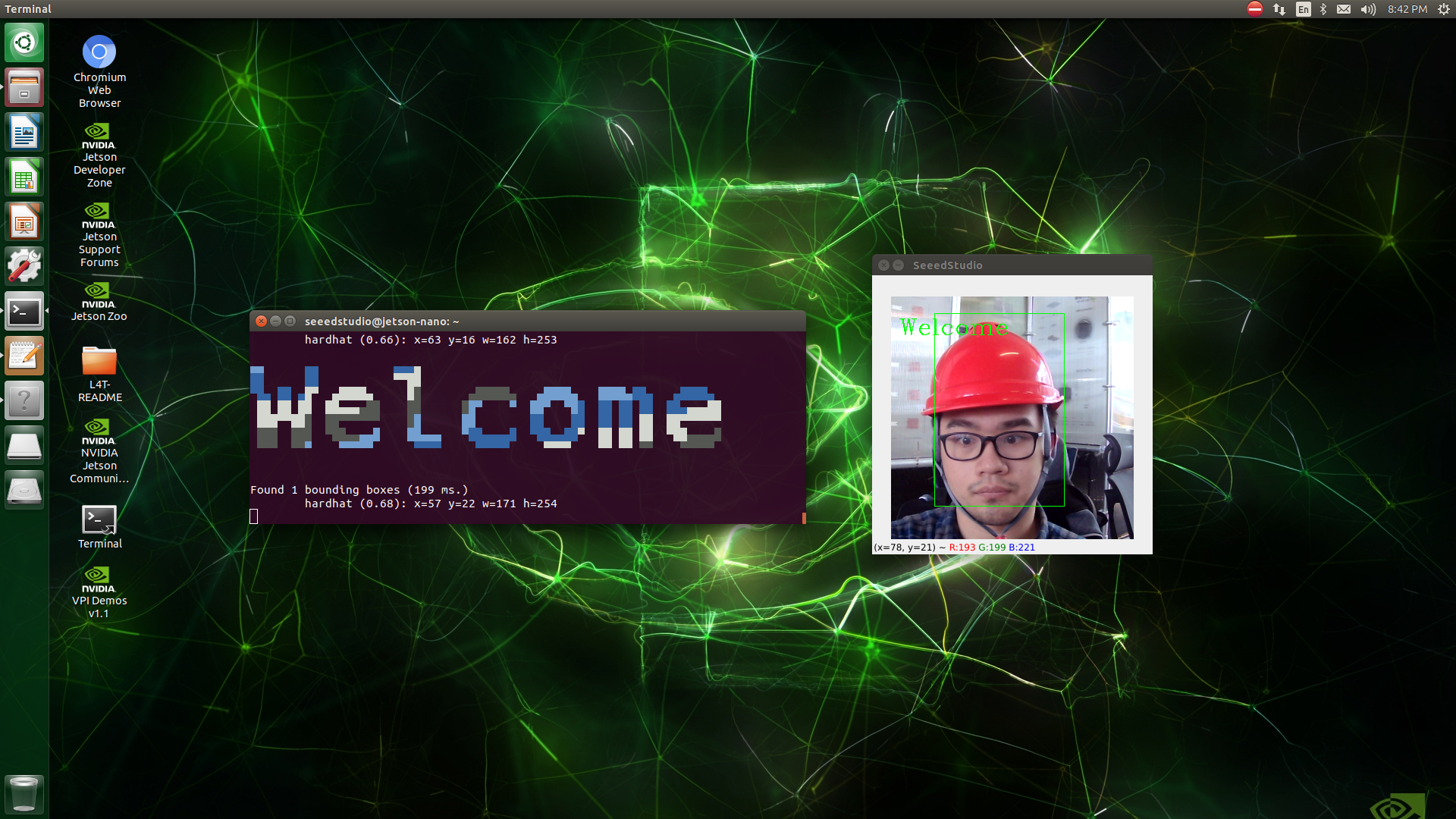
| Edge Impulse Edge Impulse is the leading development platform for machine learning on edge devices, free for developers and trusted by enterprises. Accelerate ML solution development using low-code to advanced integrations with the support from an expert. Learn more > Hard Hat Detection with Edge Impulse > |
+ |
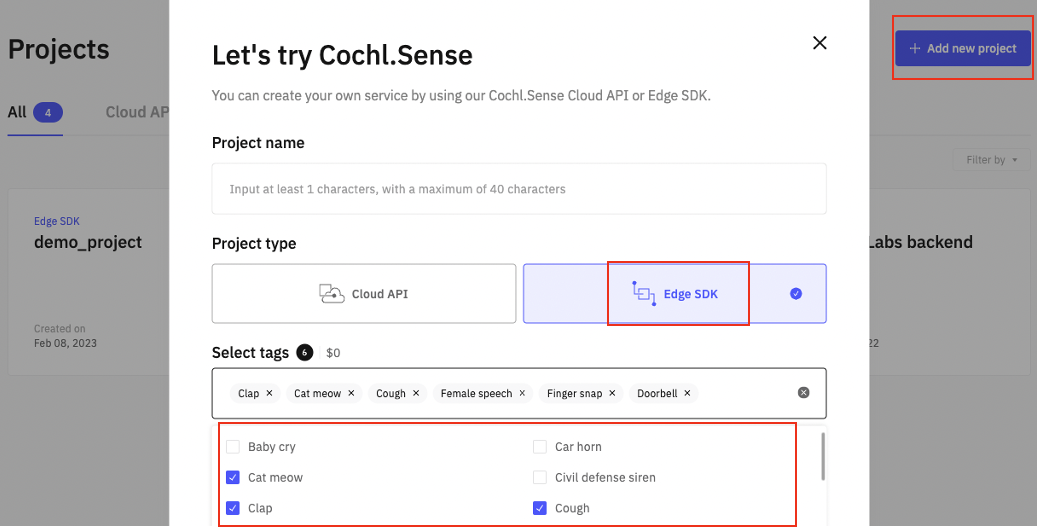
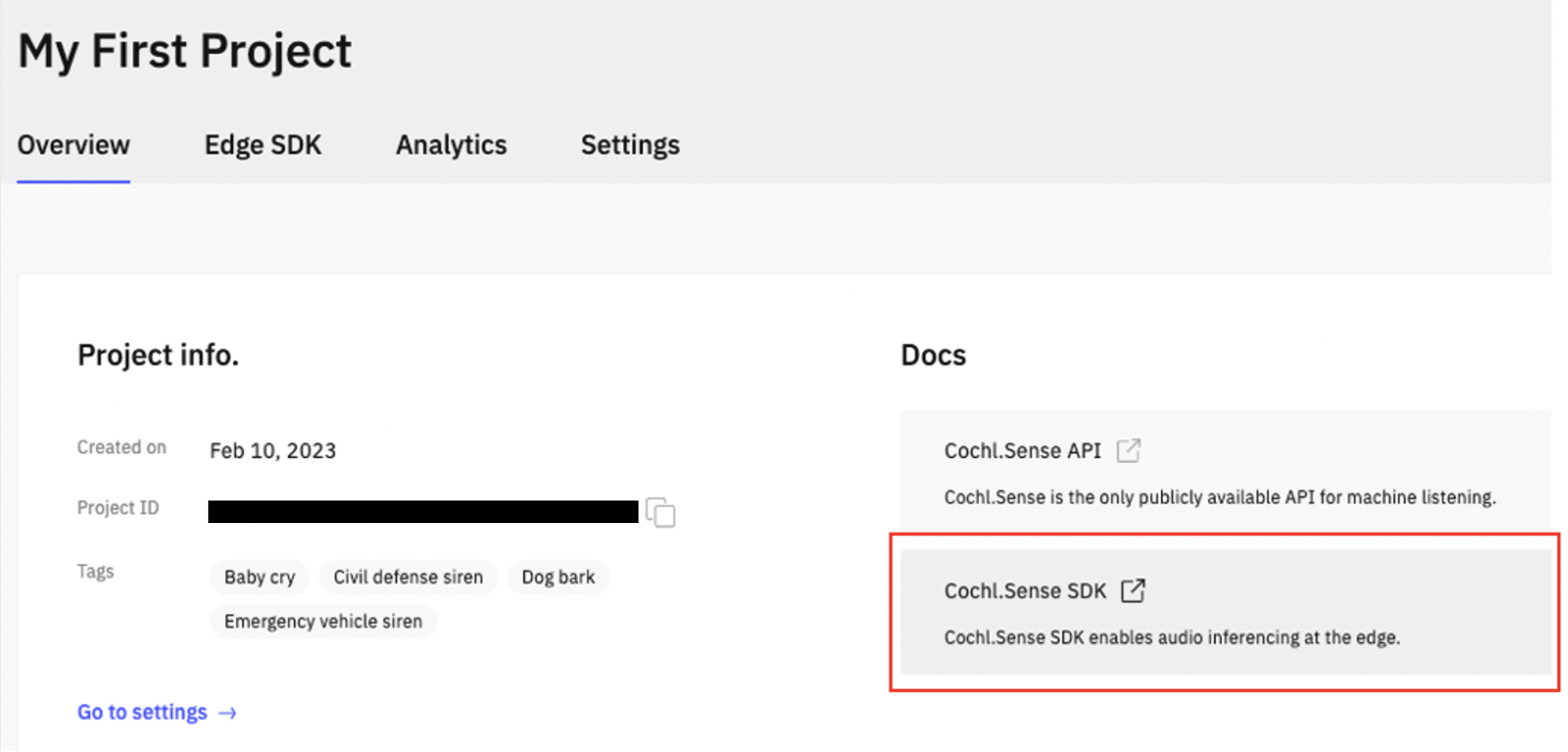
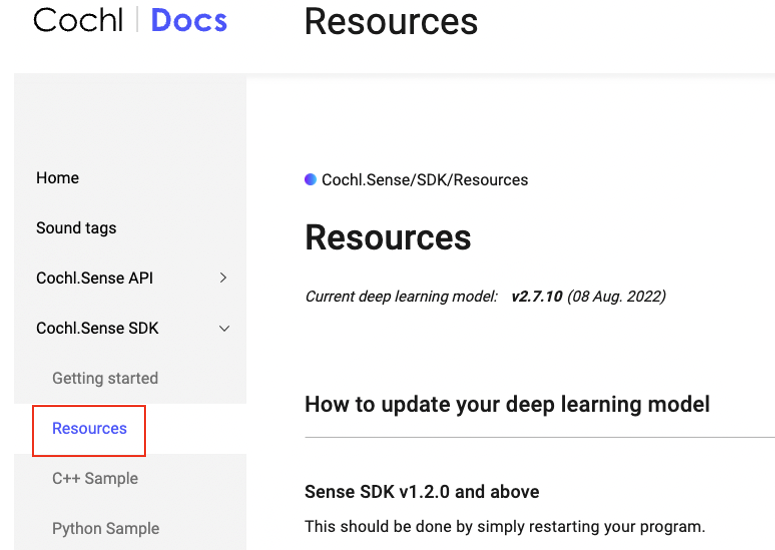
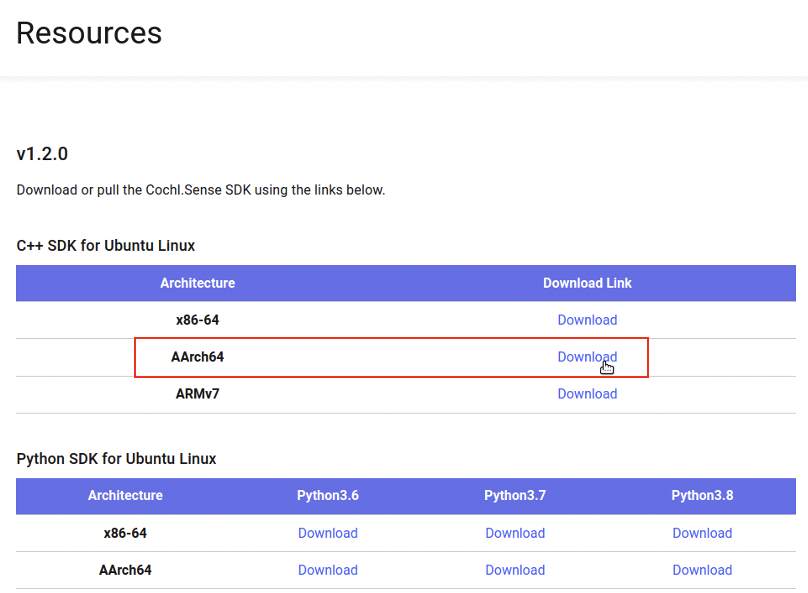
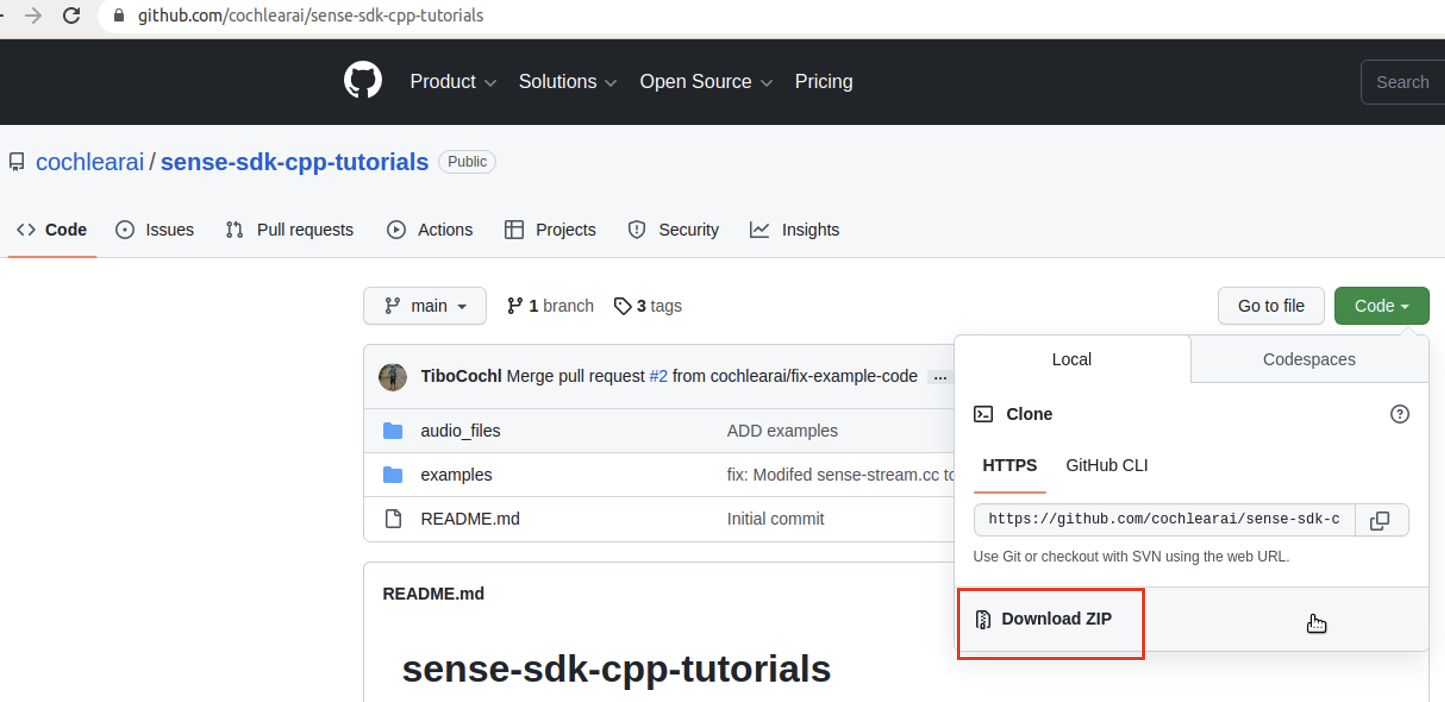
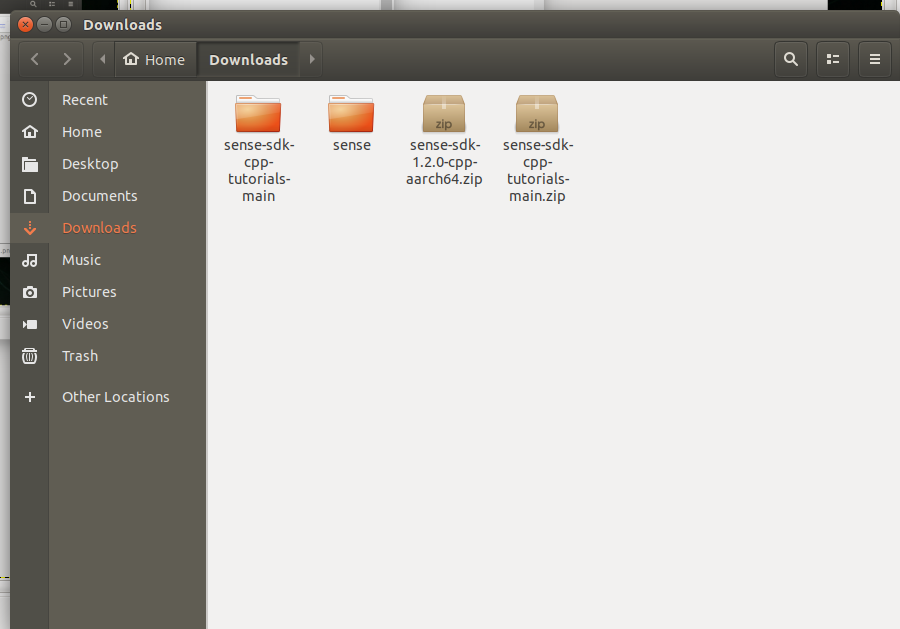
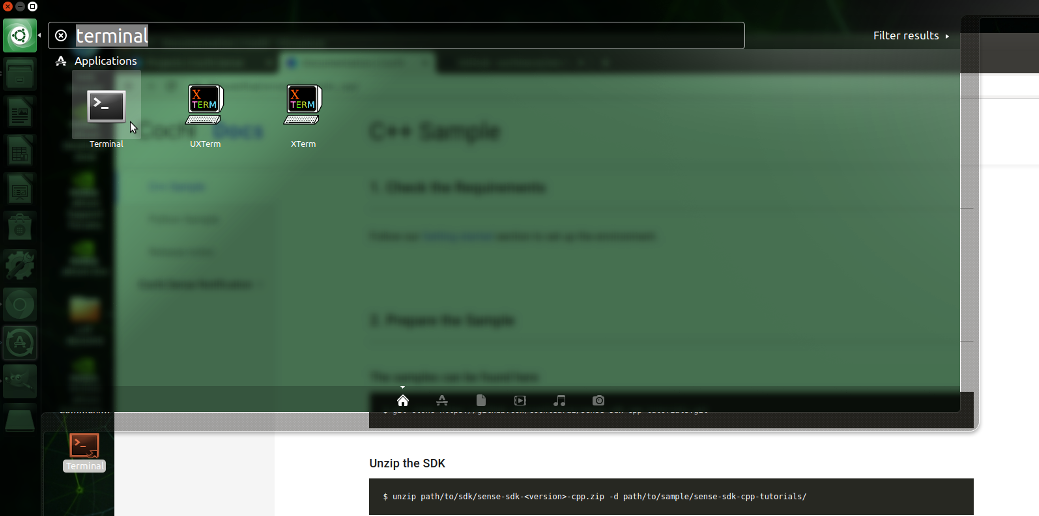
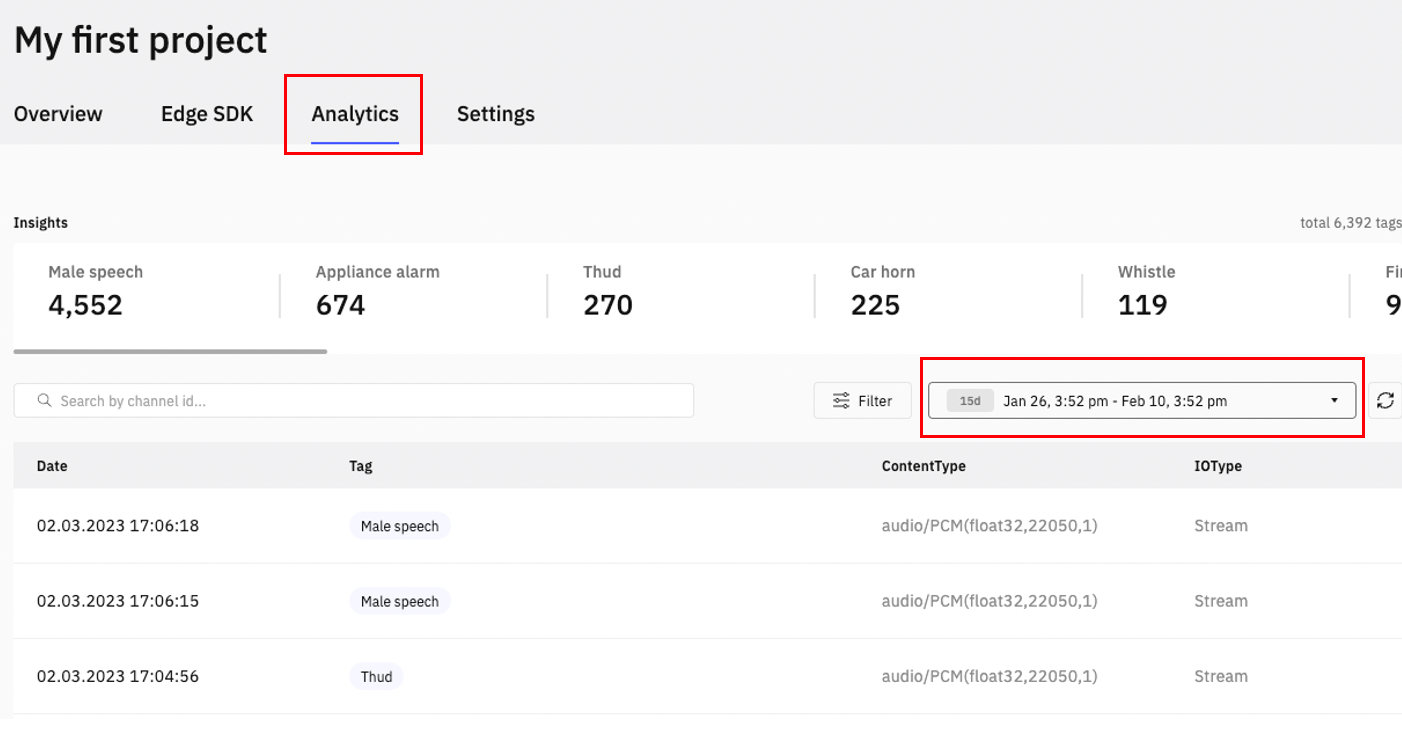
| Cochl.Sense Cochl.Sense allows computers to understand sounds with machine listening technologies. With advanced audio processing and neural network techniques, it provides noise-robust and environment-independent machine listening. Just input your audio data (either file or stream) into Cochl.Sense, and it will detect and return what kind of the input sound is. It can be used on any device, any platform (smart speakers, IP cameras, etc.). Learn more > Getting Started with Cochl.Sense on NVIDIA® Jetson Devices > |
+





















| + | + |
|---|---|
|
+ Jetson Xavier NX在一个小尺寸模块中为边缘带来高达21 TOPs的AI计算能力。它可以并行运行多个现代神经网络并处理来自多个高分辨率传感器的数据,这是完整AI系统的要求。Jetson Xavier NX系列可以用于生产应用,并支持所有流行的AI框架。 Jetson Xavier NX - reComputer J2011 Jetson Xavier NX 16GB - reComputer J2012 |
+
| + | + |
|---|---|
|
+ Jetson Nano是一款小型但功能强大的嵌入式AI系统和IoTs计算机,以低功耗平台提供现代AI的力量。通过NVIDIA Jetpack SDK和一个全桌面Linux环境,你可以快速上手并开始探索嵌入式产品的新世界。 Jetson Nano - reComputer J1010, reComputer J1020 |
+
 +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+| 本地AI助手 | +本地语音聊天机器人 | +
|---|---|
|
+
+
+  +
+ |
+
+
+
+  +
+ |
+
| 在Jetson设备上设置本地知识库,使用ollama和AnythingLLM。 | +使用Nvidia Riva和Meta Llama2构建本地运行的语音聊天机器人。 | +
| + | + |
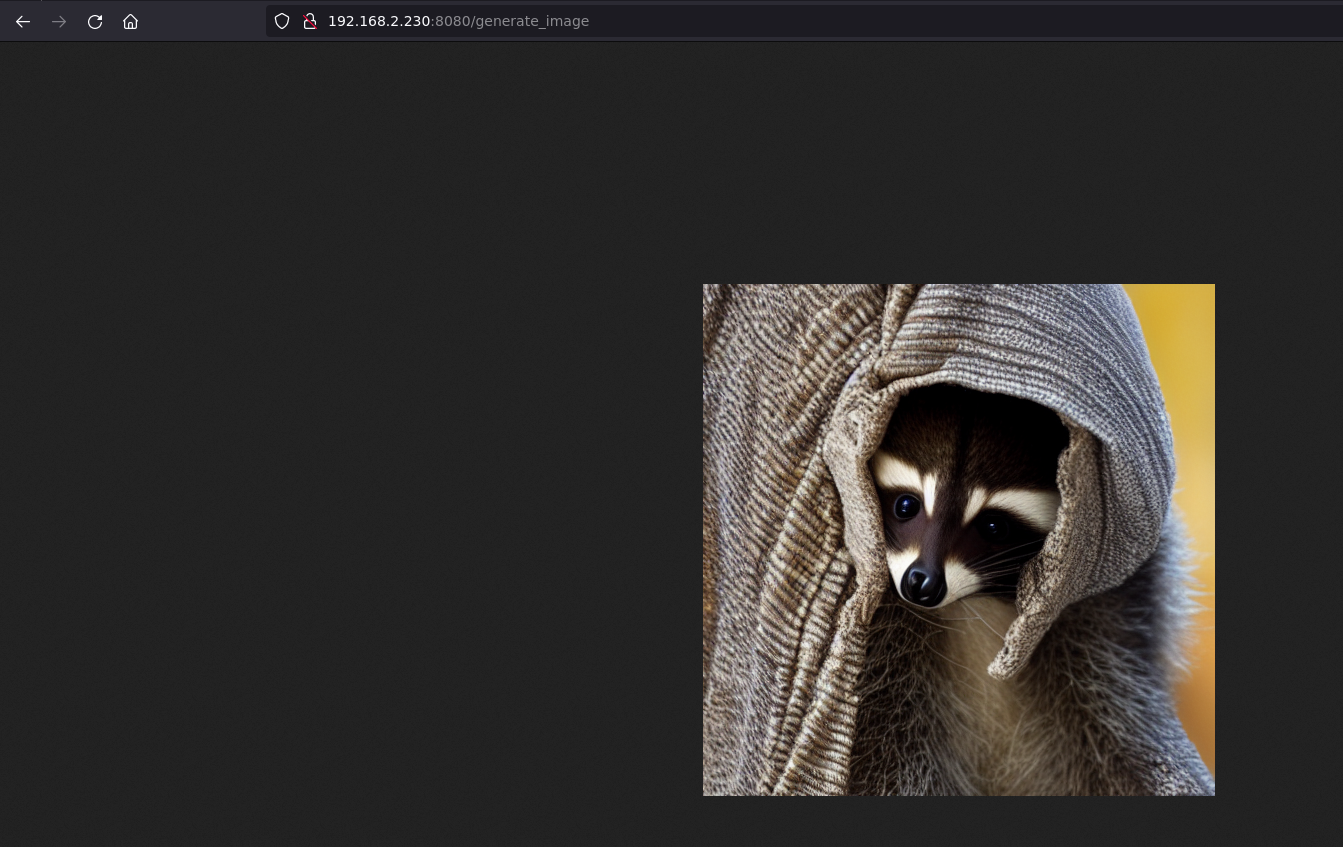
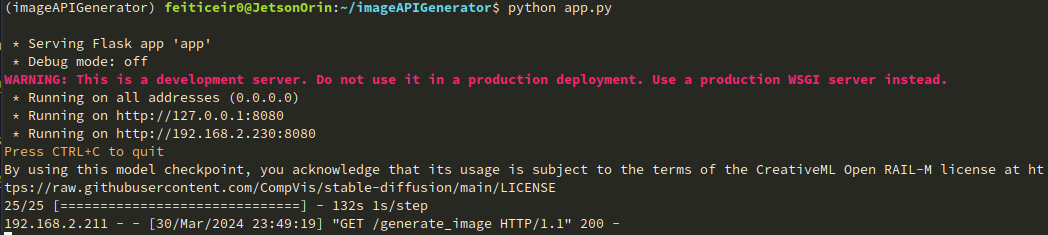
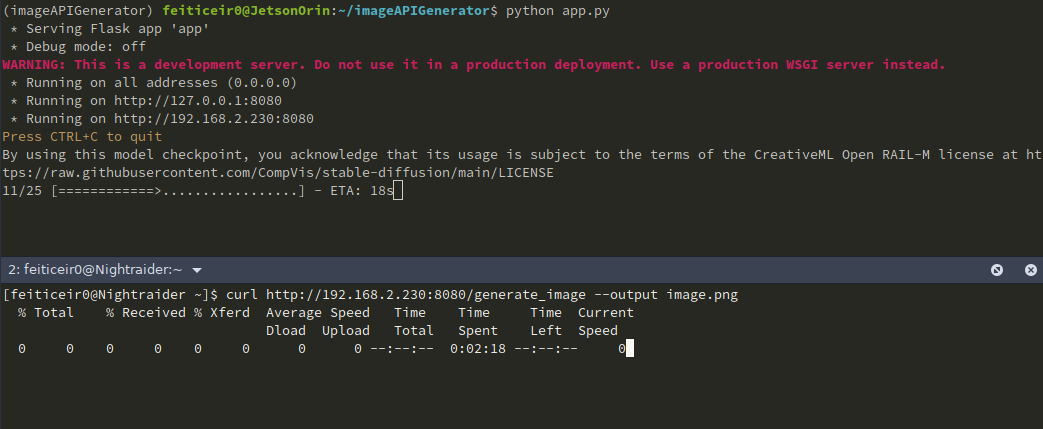
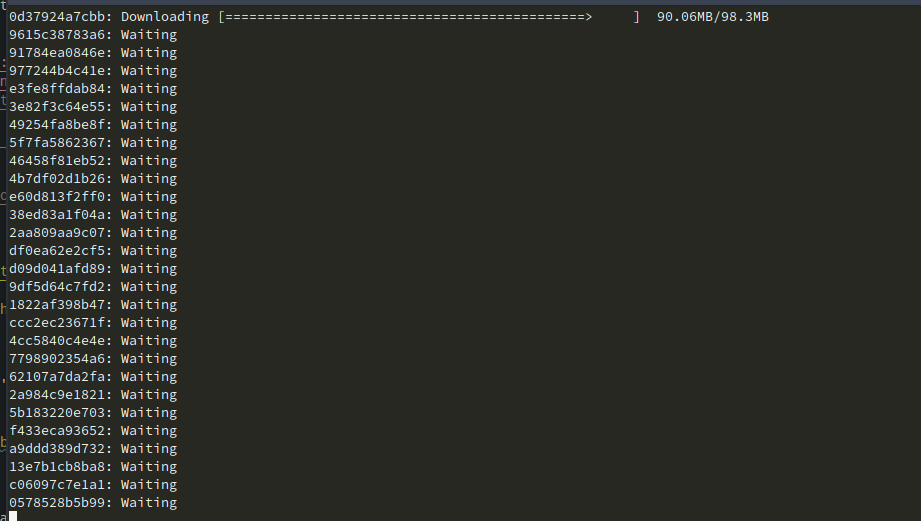
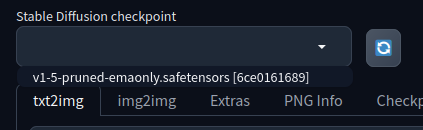
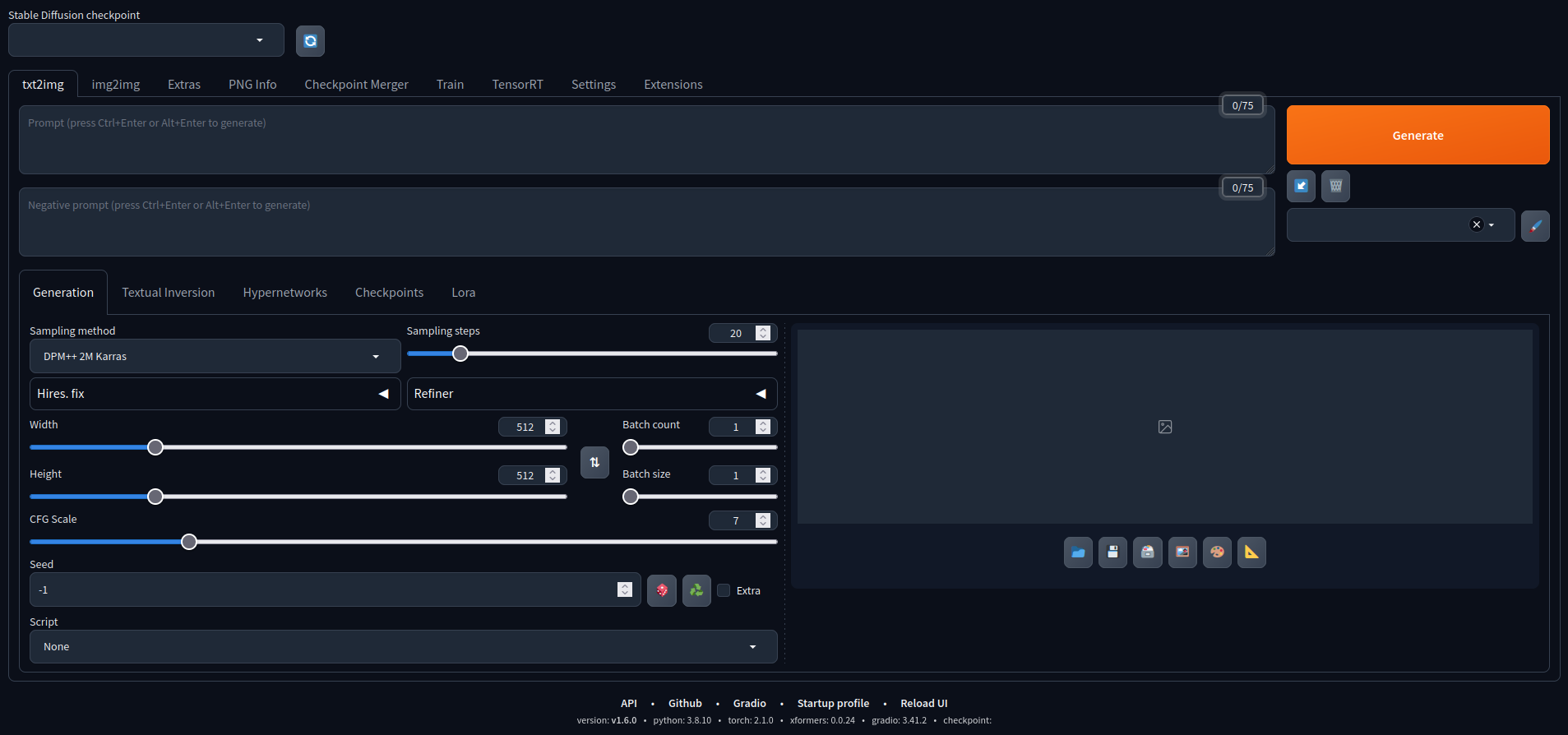
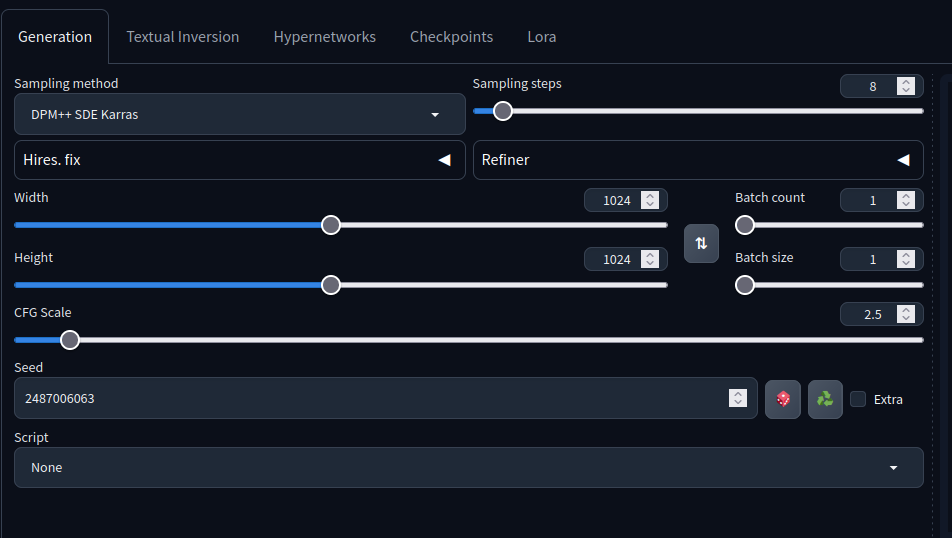
| 在本地运行LLM文本到图像 | +
|---|
|
+
+
+  +
+ |
+
| 在Jetson上部署图像生成模型并评估其推断性能。 | +
|
+
+ 📚 了解更多
+
+ |
+
| Speech Subtitle Generation | +Deploy Whisper on NVIDIA Jetson Orin | +
|---|---|
|
+
+
+  +
+ |
+
+
+
+  +
+ |
+
| Speech Subtitle Generation on Jetson, which can offer real-time speech-to-subtitle services while avoiding information leakage on the internet. | +Deploying Whisper on the Jetson Orin to build robust, efficient STT applications. | +
| + |
+
+ 📚 Learn More
+
+ |
+
| + Run VLM on reComputer + | +
|---|
|
+
+
+  +
+ |
+
| + This wiki provides a tutorial on how to run VLM on reComputer J4012 Jetson Orin NX with Jetson Platform Services. + | +
| + + | +
| + Local AI Assistant + | ++ Local RAG with LlamaIndex + | +
|---|---|
|
+
+
+
+ |
+
+
+
+  +
+ |
+
| + Set up a local knowledge base on Jetson devices with ollama and AnythingLLM. + | ++ With this local RAG project, it can protect your data privacy and provide you with low-latency communication experience. + | +
| + + | ++ + | +
| + Fine-tune LLM on Jetson + | ++ Quantized LLM with MLC + | ++ Zero-Shot Detection + | +
|---|---|---|
|
+
+
+
+ |
+
+
+
+  +
+ |
+
+
+
+  +
+ |
+
| + Deploy Llama-Factory on Nvidia Jetson and use Llama-Factory to train a large language model. + | ++ Deploying the quantized Llama2-7B with MLC LLM on the Jetson Orin NX. + | ++ The Zero Shot Detection AI service exposes REST API endpoints to control stream input and objects to detect. + | +
| + + | ++ + | ++ + | +
| + Format Output with Langchain + | +||
|
+
+
+  +
+ |
+ ||
| + Use Langchain to format the output of large language models and deploy it on edge computing devices. + | +||
| + + | +
 +
+
+
+
+
+
 +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+  +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+ +
+
+
+ +
+ +
+
| reComputer (based on Jetson with RAM >= 16GB) + | +
|---|
 |
+
+
+ 立即购买 🖱️
+
+ |
+

| reComputer(或基于 Jetson 的其他设备) | +
|---|
|
+
+
+ 立即购买 🖱️
+
+ |
+




| reComputer(或其他基于Jetson的设备) + | +reSpeaker (或其他USB接口麦克风) | +
|---|---|
 |
+  |
+
+
+ 现在获取一台 🖱️
+
+ |
+
+
+ 现在获取一台 🖱️
+
+ |
+



| 产品名称 | +reComputer Industrial J4012 | +reComputer Industrial J4011 | +reComputer Industrial J3011 | +reComputer Industrial J3010 | +reComputer Industrial J2012 | +reComputer Industrial J2011 | +
|---|---|---|---|---|---|---|
| NVIDIA Jetson 模块 | +Orin NX 16GB | +Orin NX 8GB | +Orin Nano 8GB | +Orin Nano 4GB | +Xavier NX 16GB | +Xavier NX 8GB | +
| 库存单位 | +110110191 | +110110190 | +110110193 | +110110192 | +110110189 | +110110188 | +
| 处理器系统 | +AI Performance | +100 TOPS | +70 TOPS | +40 TOPS | +20 TOPS | +21 TOPS | +
| GPU | +1024-core NVIDIA Ampere architecture GPU with 32 Tensor Cores | +512-core NVIDIA Ampere architecture GPU with 16 Tensor Cores | +384-core NVIDIA Volta™ GPU with 48 Tensor Cores | +|||
| CPU | +8-core Arm® Cortex®-A78AE v8.2 64-bit CPU 2MB L2 + 4MB L3 |
+ 6-core Arm® Cortex®-A78AE v8.2 64-bit CPU 1.5MB L2 + 4MB L3 |
+ 6-core NVIDIA Carmel ARM®v8.2 64-bit CPU, 6MB L2 + 4MB L3 | +|||
| 内存 | +16GB 128-bit LPDDR5 102.4GB/s |
+ 8GB 128-bit LPDDR5 102.4GB/s |
+ 8GB 128-bit LPDDR5 68 GB/s |
+ 4GB 64-bit LPDDR5 34 GB/s |
+ 16GB 128-bit LPDDR4x 59.7GB/s |
+ 8GB 128-bit LPDDR4x 59.7GB/s |
+
| 视频编码 | +1*4K60 (H.265) | 3*4K30 (H.265) | 6*1080p60 (H.265) | 12*1080p30 (H.265) | +1080p30 supported by 1-2 CPU cores | +2*4K60 | 4*4K30 | 10*1080p60 | 22*1080p30 (H.265) 2*4K60 | 4*4K30 | 10*1080p60 | 20*108p30 (H.264) |
+ |||
| 视频解码 | +1*8K30 (H.265) | 2*4K60 (H.265) | 4*4K30 (H.265) | 9*1080p60 (H.265) | 18*1080p30 (H.265) | +1*4K60 (H.265) | 2*4K30 (H.265) | 5*1080p60 (H.265) | 11*1080p30 (H.265) | +2*8K30 | 6*4K60 | 12*4K30 | 22*1080p60 | 44*1080p30 (H.265) 2*4K60 | 6*4K30 | 10*1080p60 | 22*1080p30 (H.264) |
+ |||
| 储存 | +eMMC |
+ - |
+ - | +- | +- | +16GB eMMC 5.1 | +
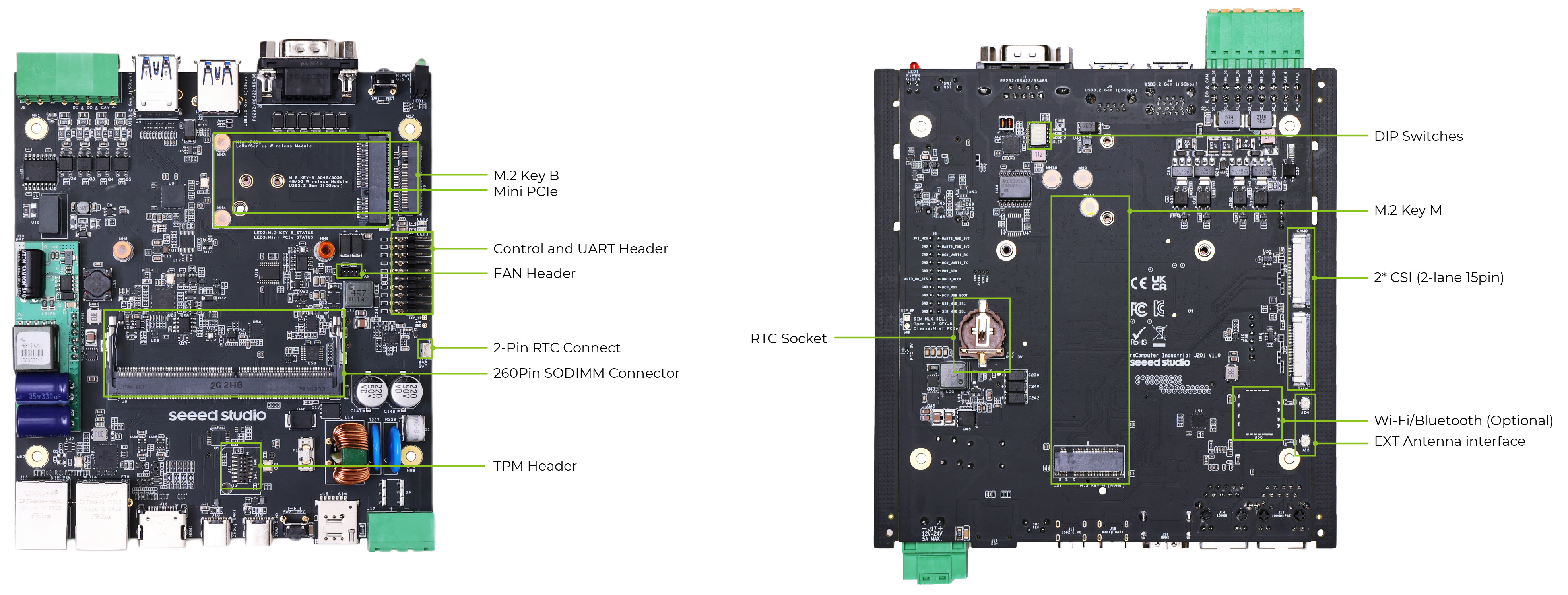
| 扩展 | +M.2 Key M PCIe Gen4.0 SSD (M.2 NVMe 2280 SSD 128G included) | +|||||
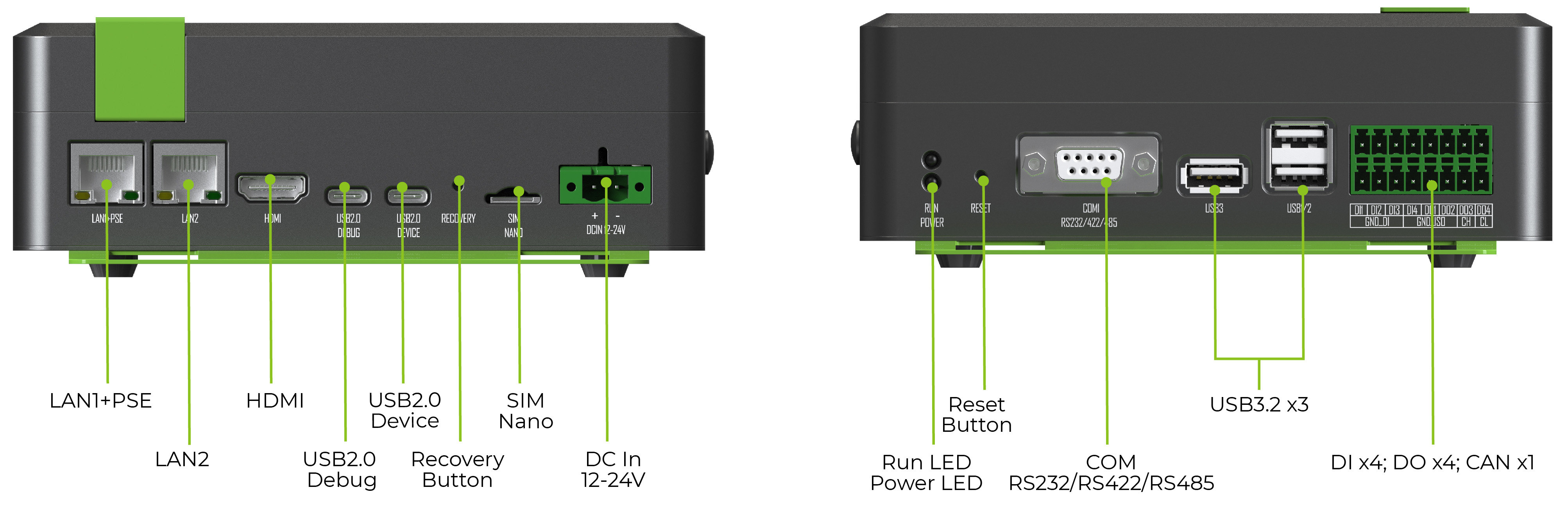
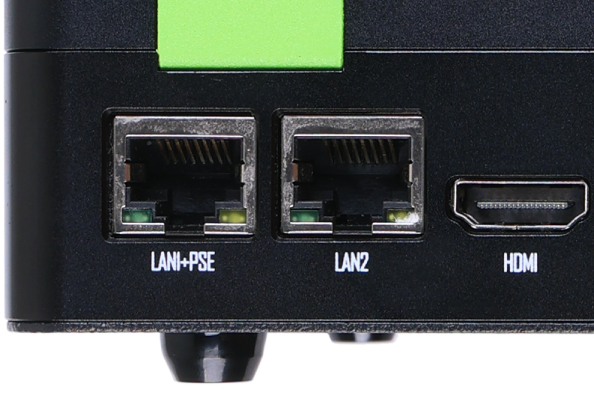
| I/O | +Networking | +1* LAN1 RJ45 GbE PoE(PSE 802.3 af 15 W) 1* LAN2 RJ45 GbE (10/100/1000Mbps) |
+ ||||
| USB | +3* USB3.2 Gen1, 1* USB2.0 Type C(Device mode), 1* USB2.0 Type C For Debug UART & RP2040 | +|||||
| DI/DO | +4*DI,4*DO,3*GND_DI,2*GND_DO,1*GND_ISO,1*CAN |
+ |||||
| COM | +1* DB9 (RS232/RS422/RS485) | +|||||
| 显示端口 | +1*HDMI 2.0 Type A | +|||||
| SIM | +1* Nano SIM card slot | +|||||
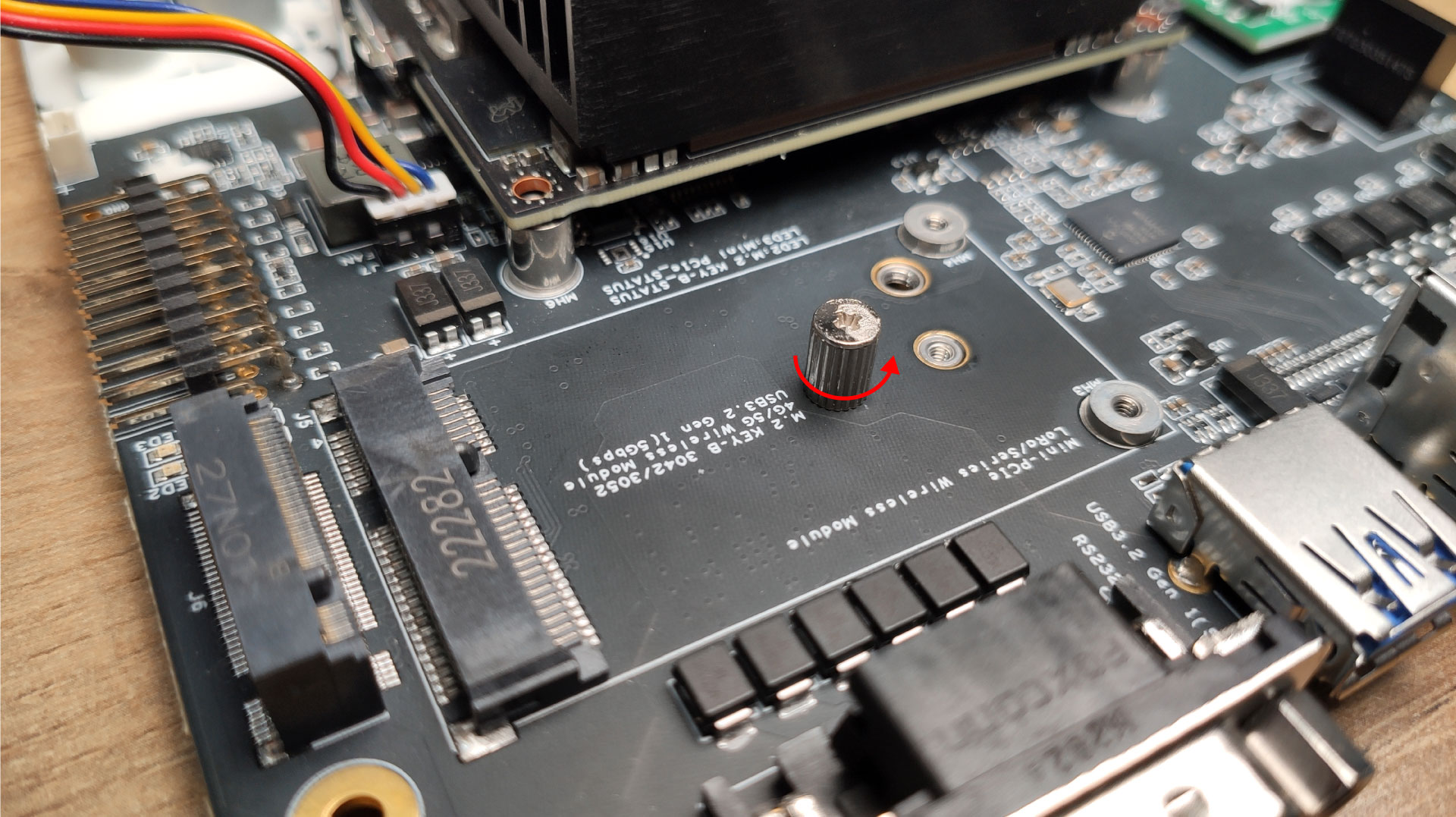
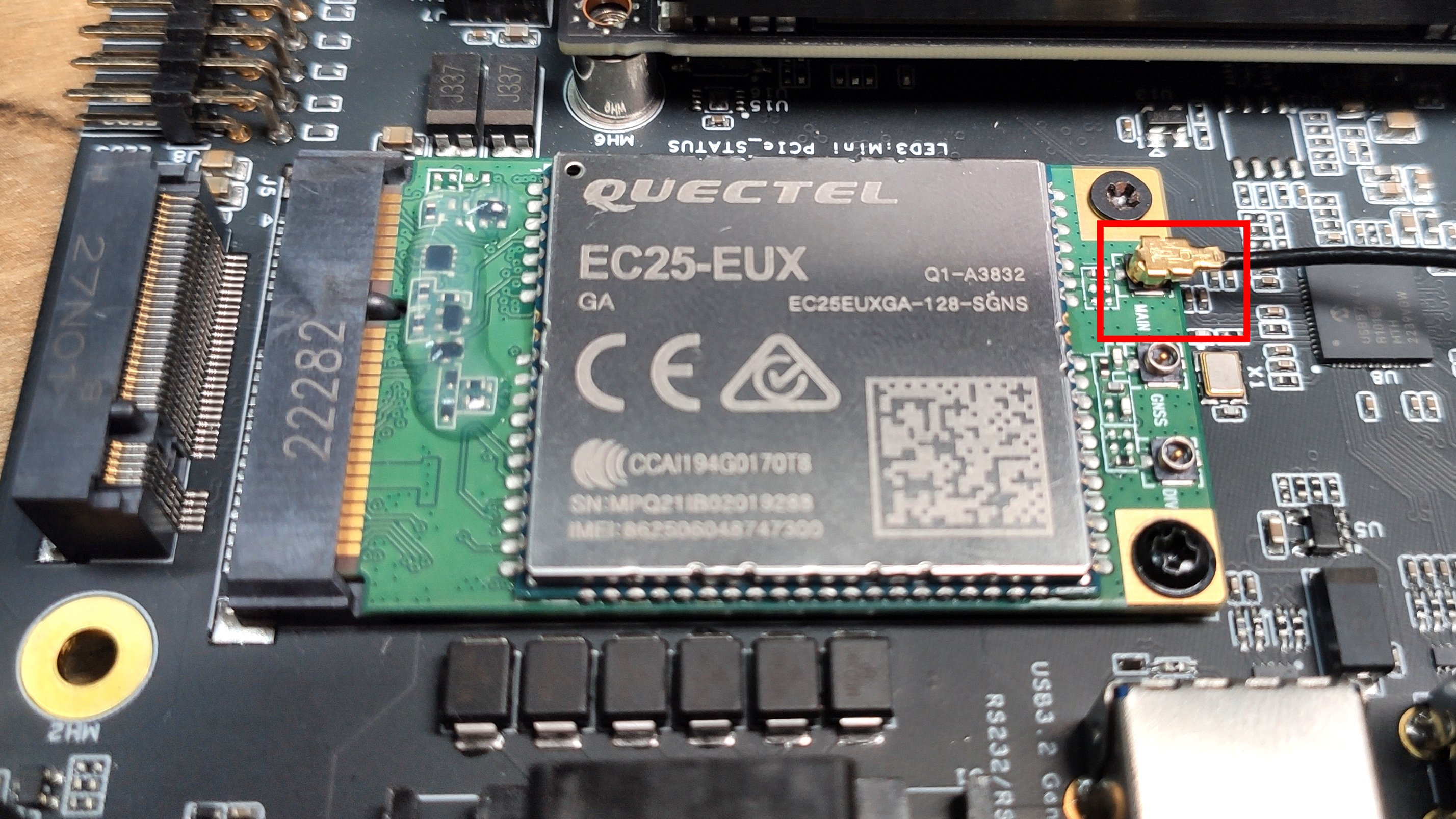
| 扩展接口 | +Mini PCIe | +Mini PCIe for 4G/LoRaWAN® (Module optional) |
+ ||||
| Wi-Fi | +Support SMD Wi-Fi/Bluetooth (Module optional) | +|||||
| M.2 Key B | +M.2 Key B support 4G/5G (Module optional) | +|||||
| Fan | +Fanless, passive heatsink 1*Fan connectors(5V PWM) |
+ |||||
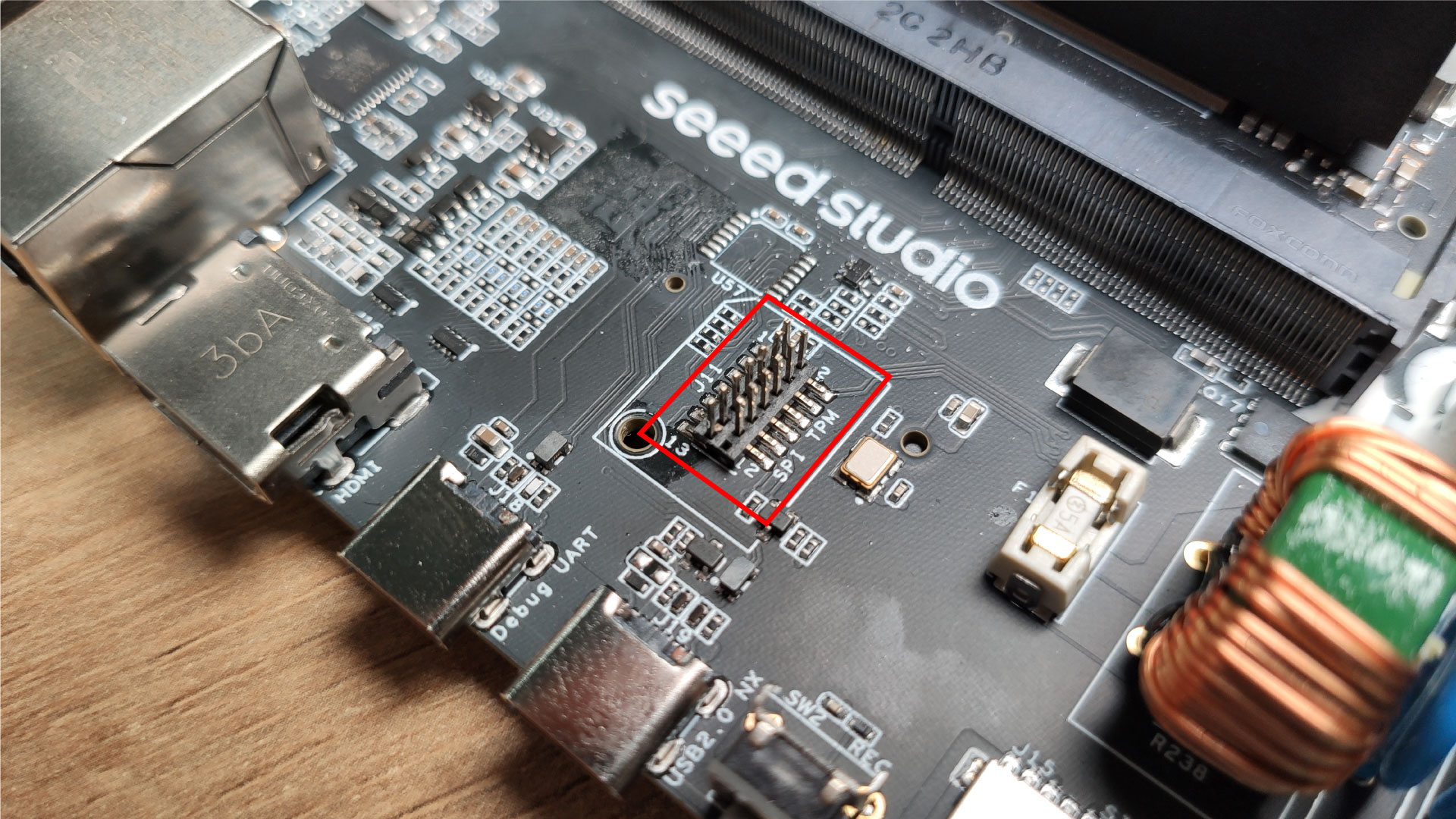
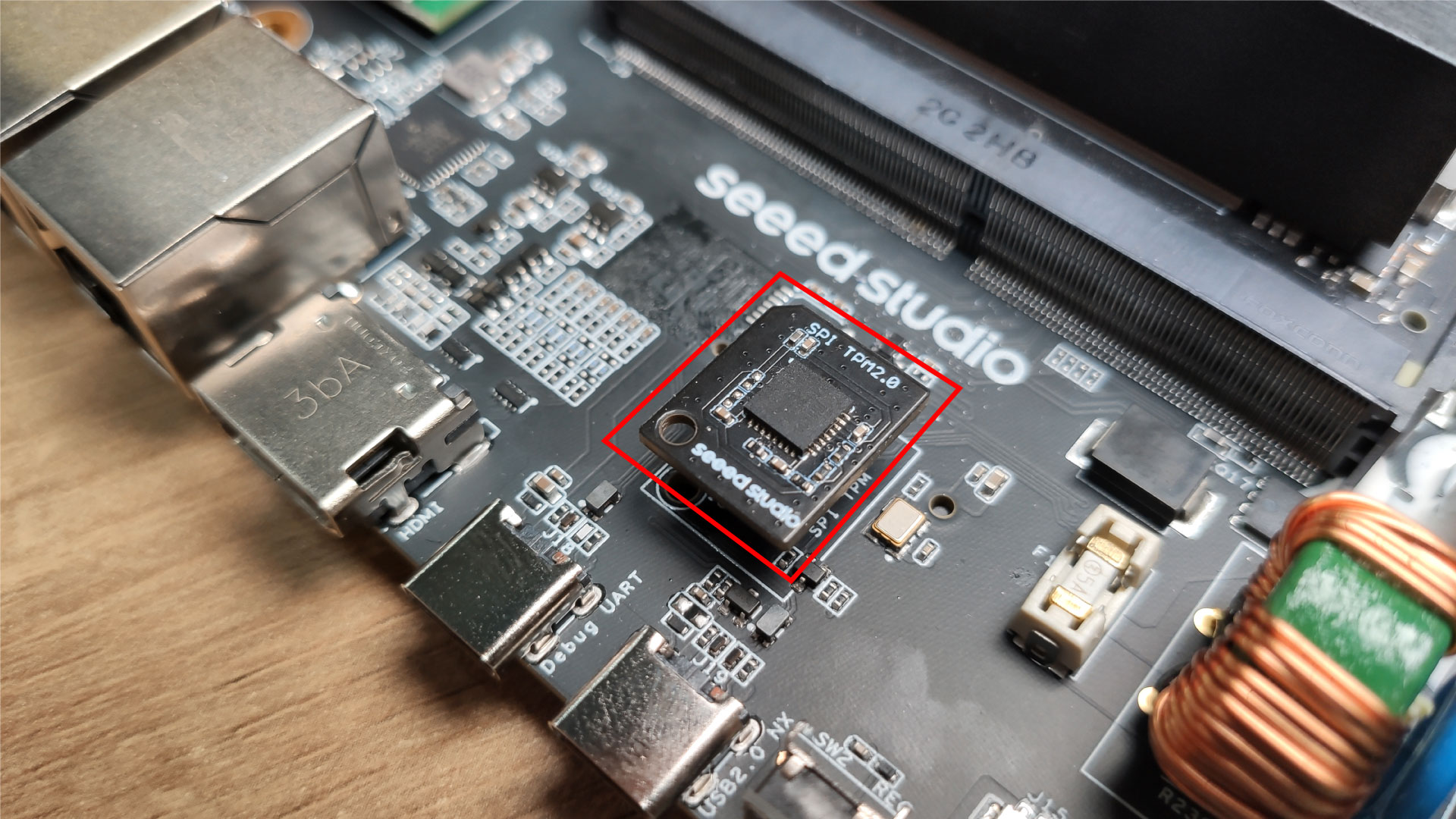
| TPM | +1* TPM 2.0 connector (Module optional) | +|||||
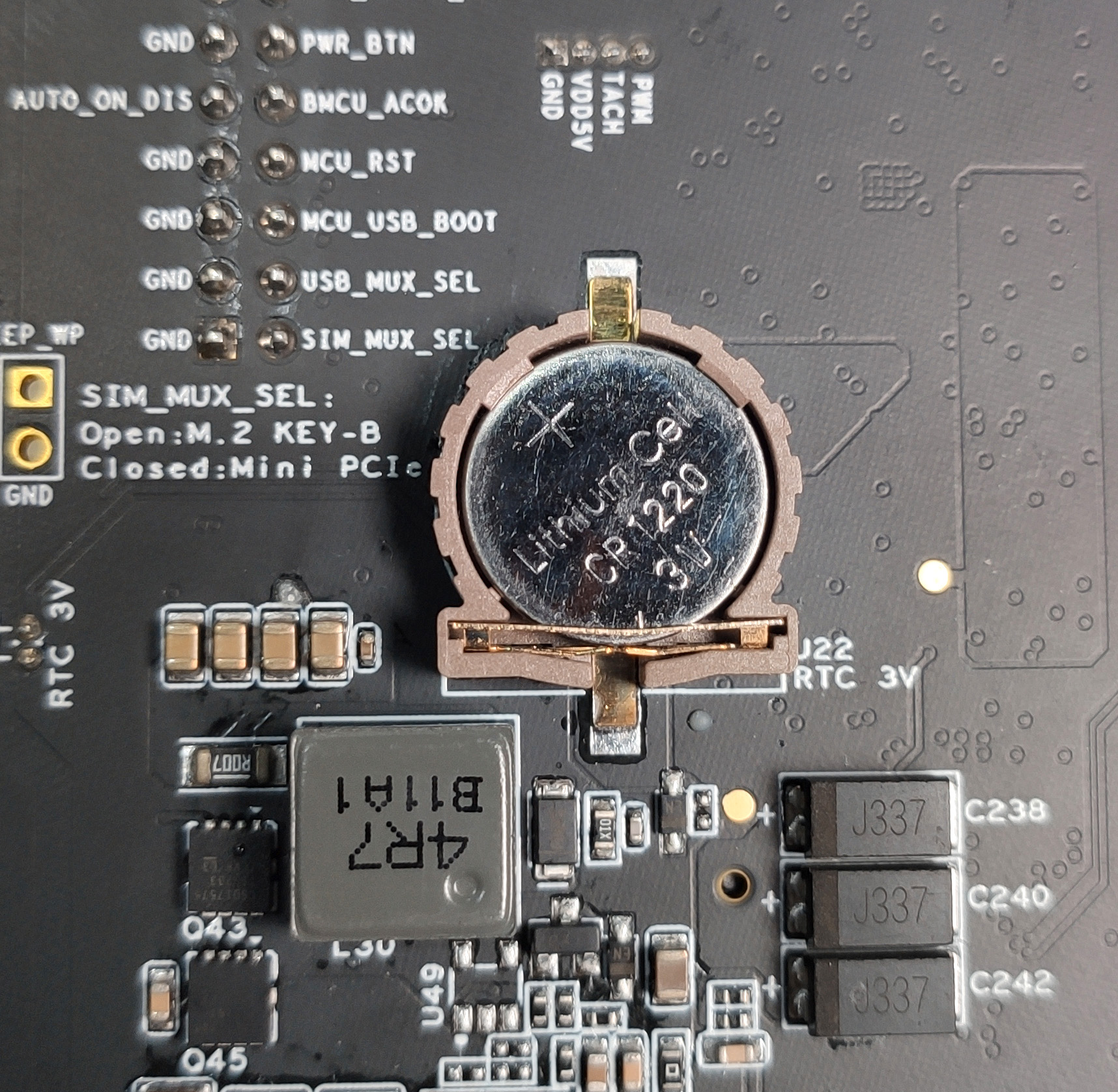
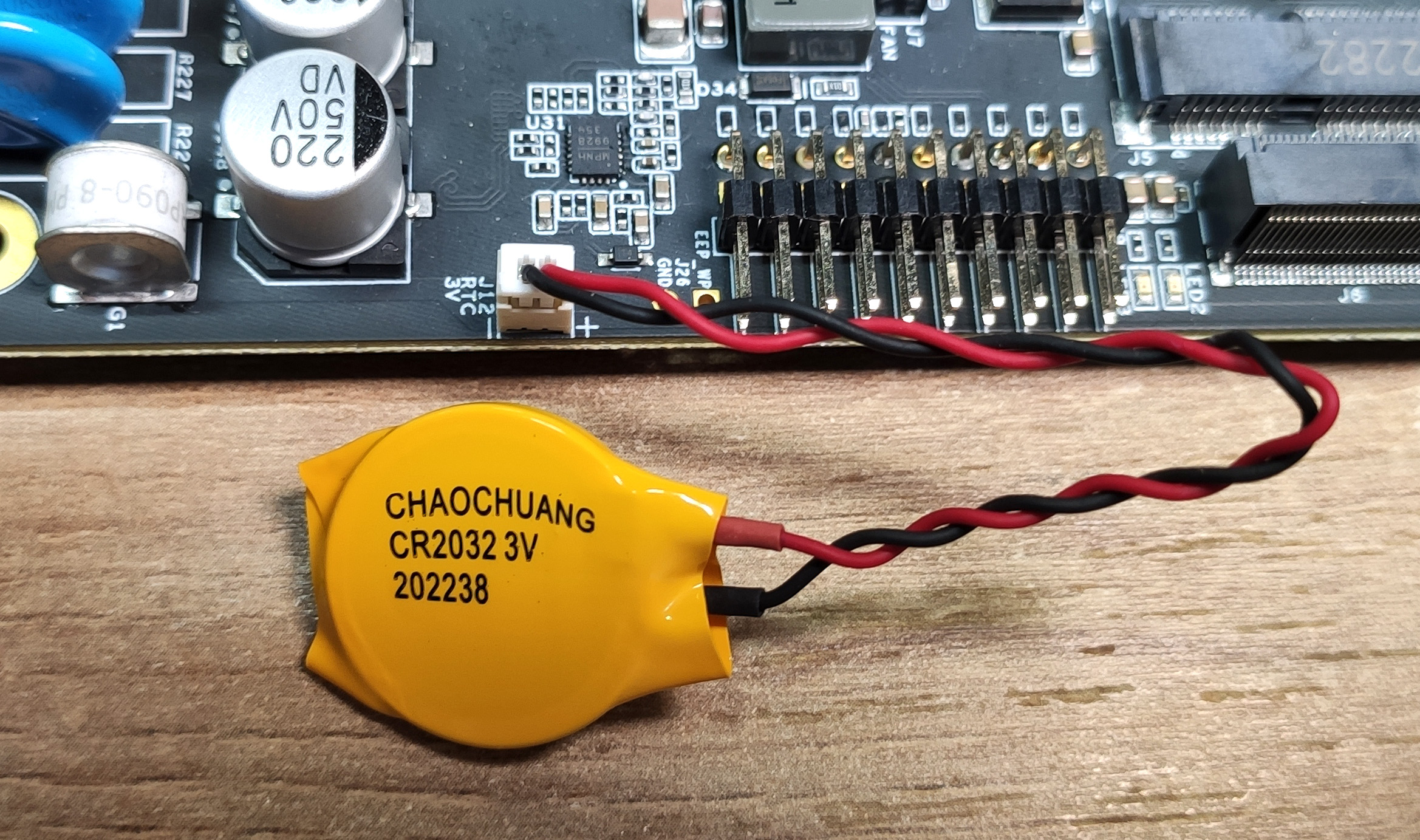
| RTC | +1* RTC socket (CR1220 included), 1* RTC 2-pin | +|||||
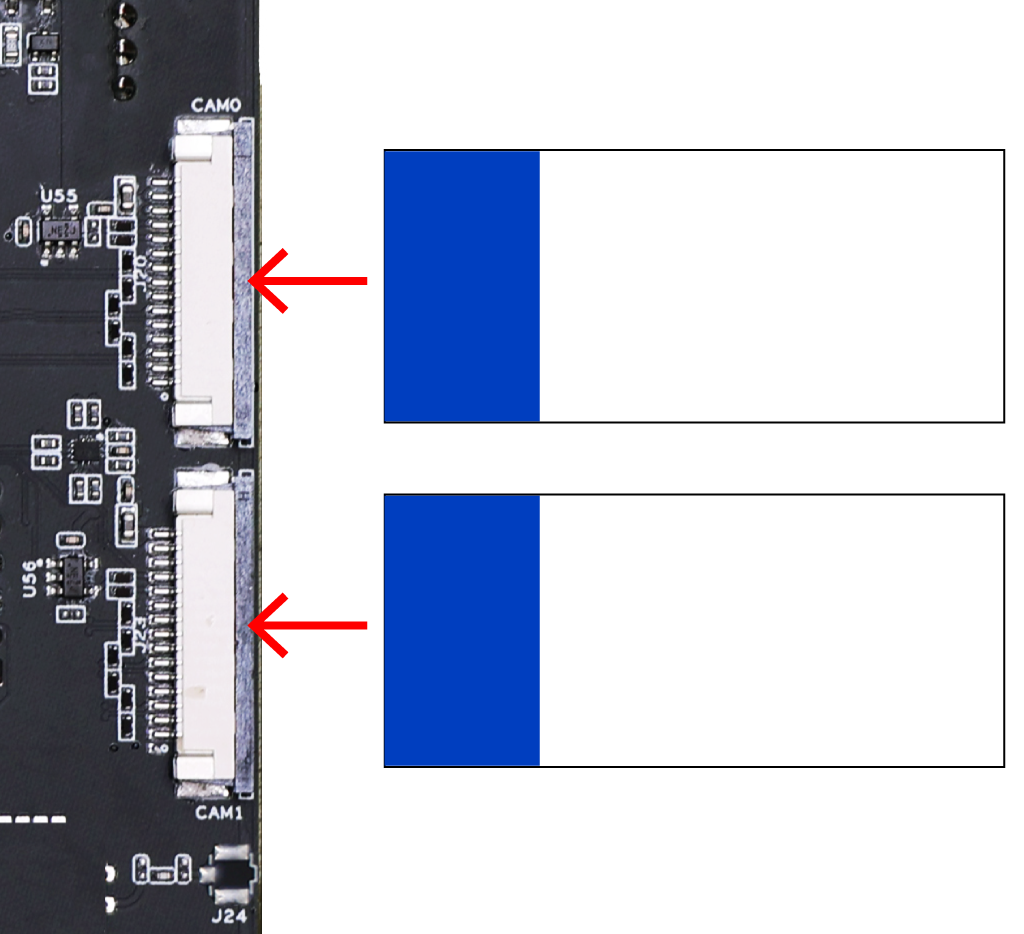
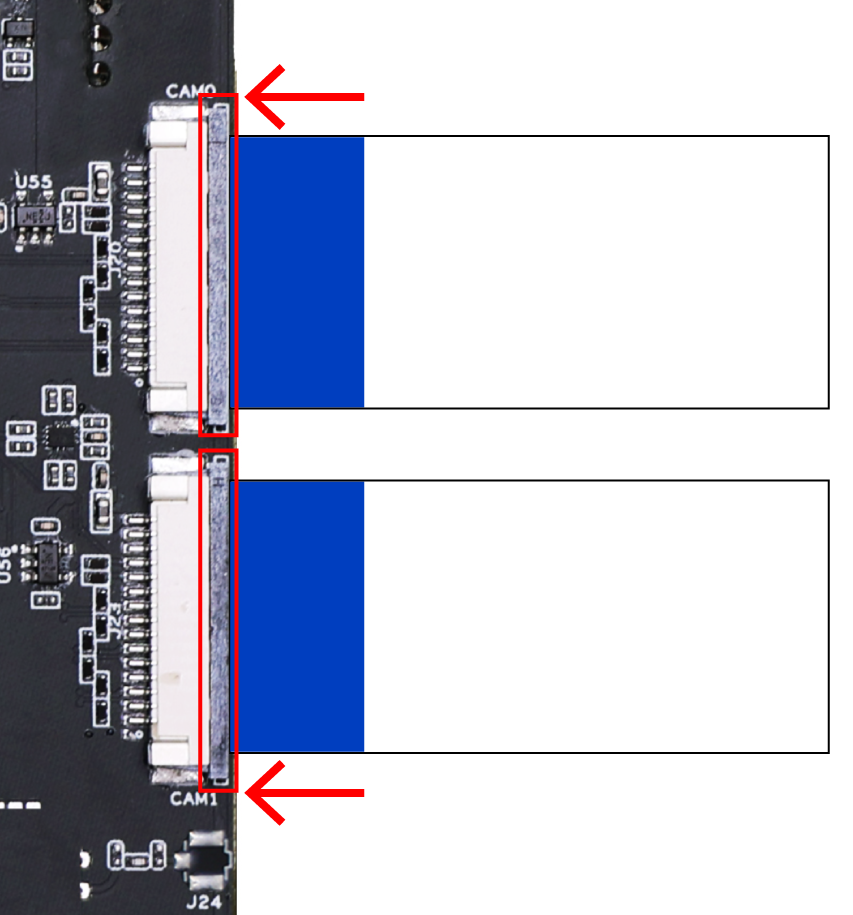
| 摄像头 | +2* CSI (2-lane 15pin) | +|||||
| 电源 | +Power Supply | +DC 12V-24V Terminal block 2 pin | +||||
| 电源适配器 | +19V 电源适配器(不包括电源线) | +|||||
| 机械结构 |
+ 尺寸(宽 x 深 x 高) | +159mm*155mm*57mm | +||||
| 重量 | +1.57kg | +|||||
| 安装 | +Desk, DIN rail, wall-mounting, VESA | +|||||
| 环境 | +工作环境 | +-20 ~ 60°C with 0.7m/s | +||||
| 工作湿度 | +95% @ 40 °C (非冷凝) | +|||||
| 振动 | +3 Grms @ 5 ~ 500 Hz, random, 1 hr/axis | +|||||
| 冲击 | +50G peak acceleration (11 msec) | +|||||
| 操作系统 | +Pre-installed Jetpack 5.1 ( +提供带有板级支持包的Linux操作系统) | +|||||
| 认证 | +FCC, CE, RoHS, UKCA | +|||||
| 保修年限 | +2 年 | +
| 设备 | +映像链接 | +JetPack 版本 | +L4T 版本 | +
|---|---|---|---|
| reComputer Industrial J4012 | +Download | +5.1.1 | +35.3.1 | +
| reComputer Industrial J4011 | +Download | +||
| reComputer Industrial J3011 | +Download | +||
| reComputer Industrial J3010 | +Download | +||
| reComputer Industrial J2012 | +Download | +||
| reComputer Industrial J2011 | +Download | +
| Jetson 模块 | +下载链接 | +JetPack 版本 | +L4T 版本 | +
|---|---|---|---|
| Jetson Orin NX 8GB/ 16GB, Orin Nano 8GB |
+ Download | +5.1.1 | +35.3.1 | +
| Jetson Orin Nano 4GB | +Download | +||
| Jetson Xavier NX 8GB/ 16GB | +Download | +

| 设备 | +镜像链接 | +JetPack 版本 | +L4T 版本 | +
|---|---|---|---|
| reComputer Industrial J4012 | +Download | +6.0 | +36.3.0 | +
| reComputer Industrial J4011 | +Download | +||
| reComputer Industrial J3011 | +Download | +||
| reComputer Industrial J3010 | +Download | +











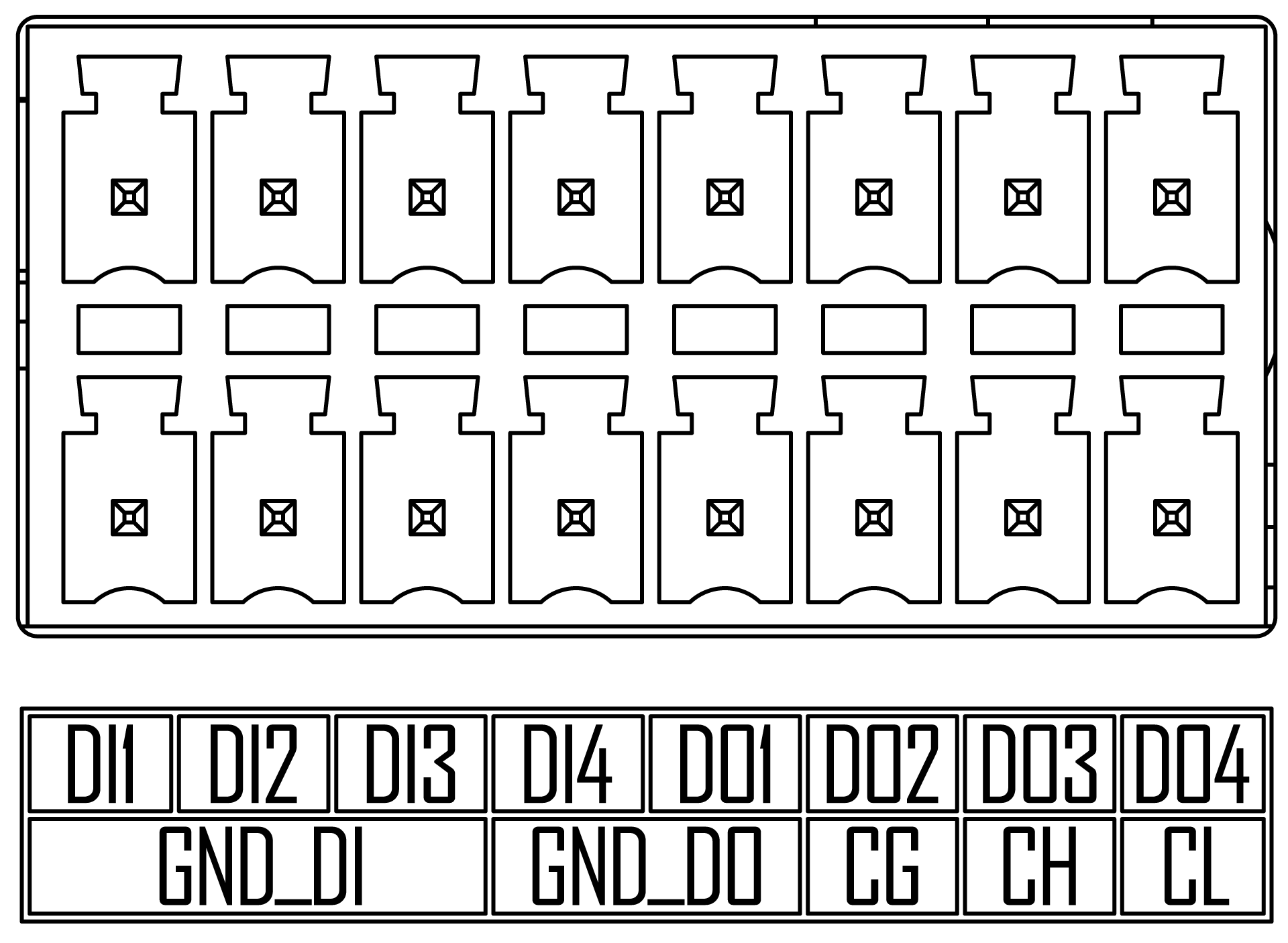
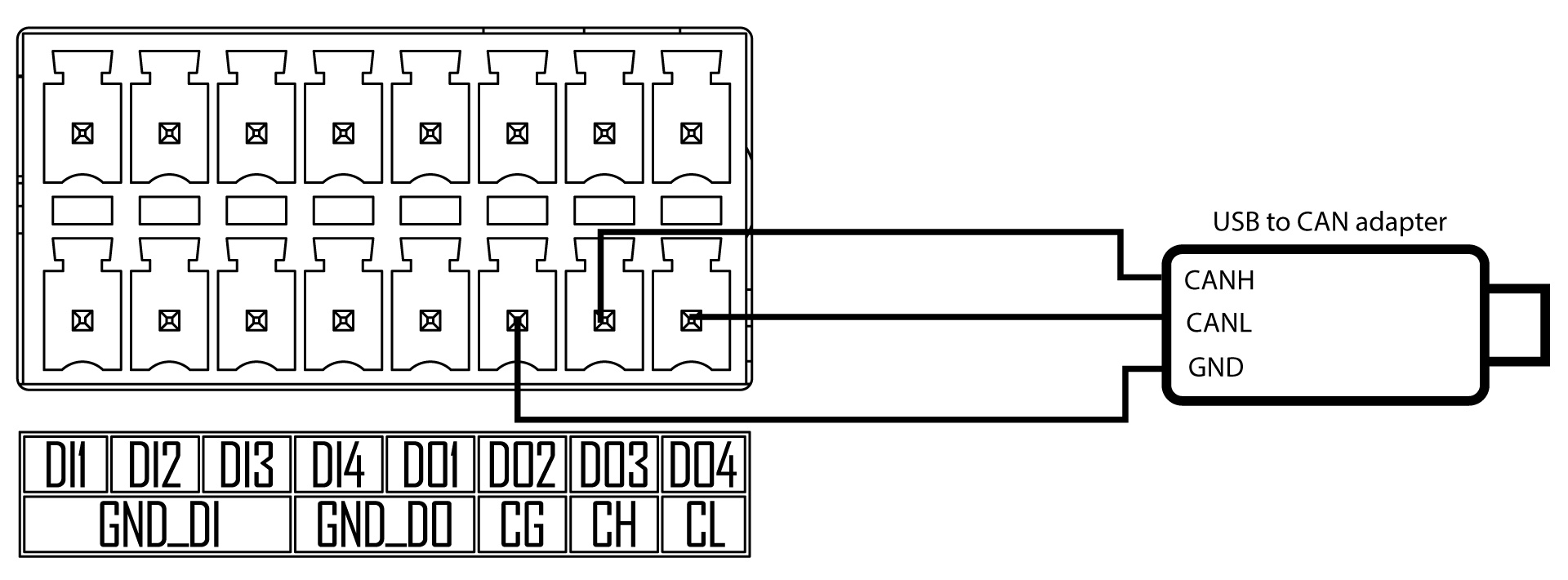
| Type | +Label Name | +Schematic Signal | +Module Pin Number | +BGA Number | +GPIO Number | +V/A Limits | +Note | +
|---|---|---|---|---|---|---|---|
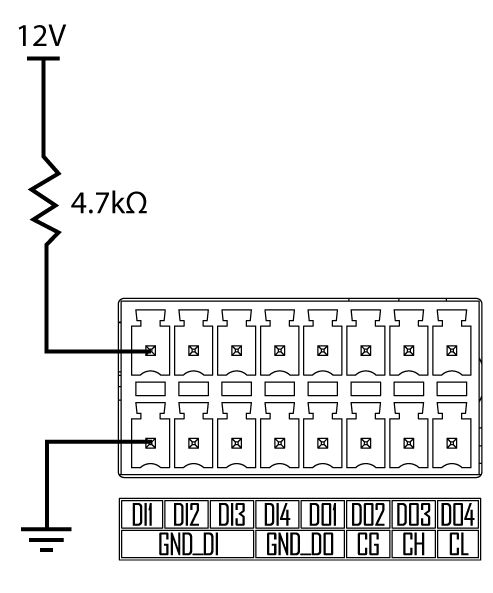
| Input | +DI1 | +DI_1_GPIO01 | +118 | +PQ.05 | +440 | +12V/ 20mA current in total | +12V Digital Input, ground signal needs to be connected to GND_DI (Pin2/4/6) |
+
| DI2 | +DI_2_GPIO09 | +211 | +PS.04 | +453 | +|||
| DI3 | +DI_3_GPIO11 | +216 | +PQ.06 | +441 | +|||
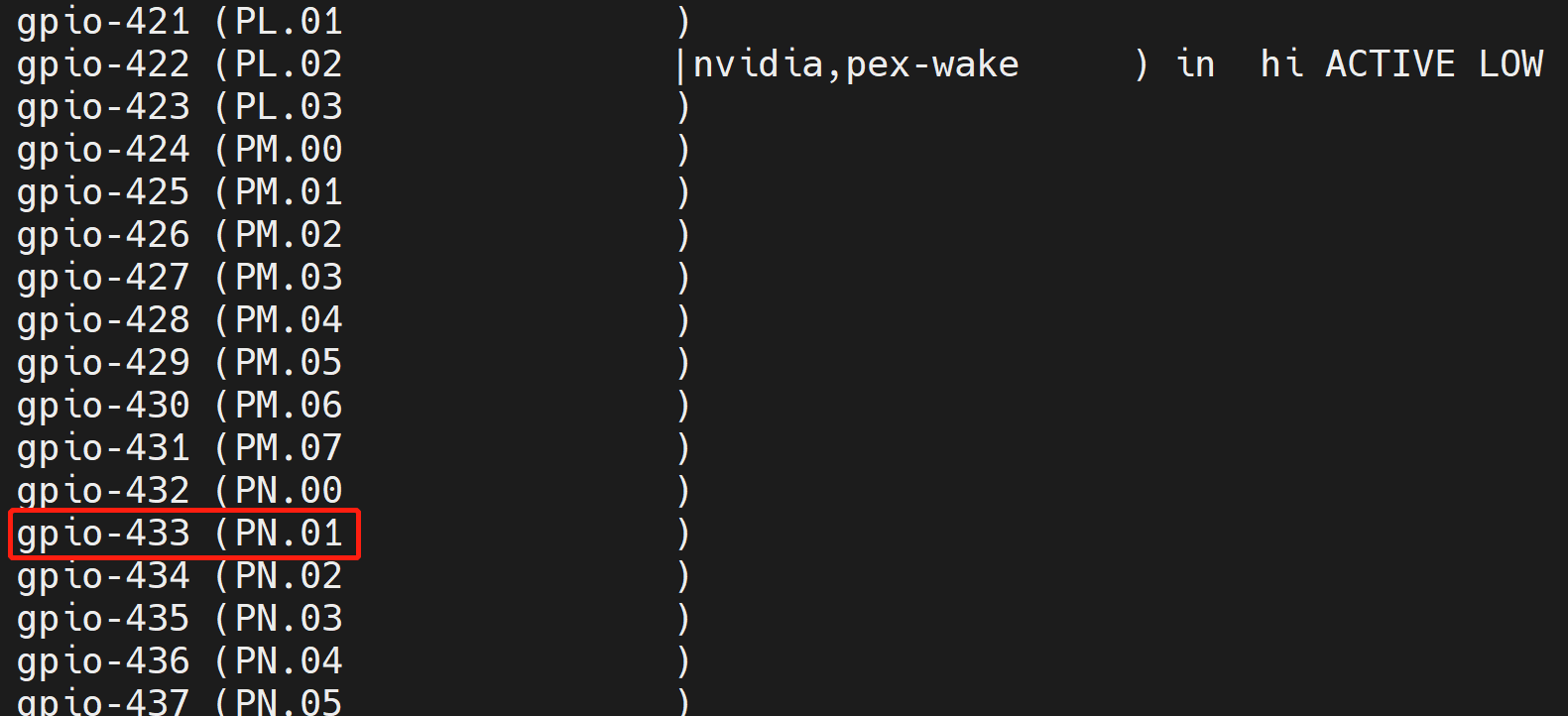
| DI4 | +DI_4_GPIO13 | +228 | +PN.01 | +419 | +|||
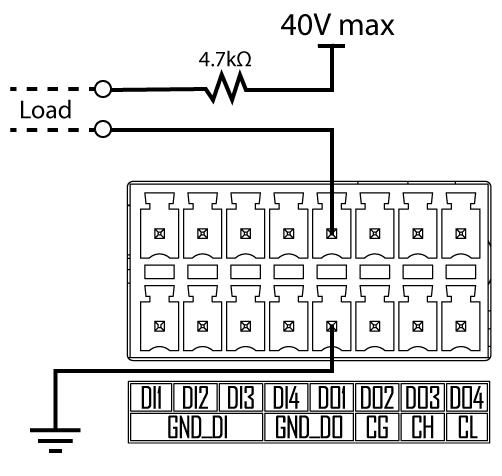
| Output | +DO1 | +DO_1_GPIO | +193 | +PT.06 | +463 | +40V/40mA load per pin | +Digital output, maximum withstand voltage 40V, ground signal needs to be connected to GND_DO(Pin8/10) |
+
| DO2 | +DO_2_GPIO | +195 | +PT.07 | +464 | +|||
| DO3 | +DO_3_GPIO | +197 | +PU.00 | +465 | +|||
| DO4 | +DO_4_GPIO | +199 | +PT.05 | +462 | +|||
| CAN | +CH | +/ | +CAN bus with standard differential signals, ground signal needs to be connected to GND_ISO (Pin 12) |
+ ||||
| CL | +|||||||
| Ground | +GND_DI | +/ | +The reference ground signal for the 12V Digital Input, which is also the return path for the DI |
+ ||||
| GND_DO | +The reference ground signal of the digital output, which is also the return path of the DO | +||||||
| CG | +The reference ground signal for CAN | +




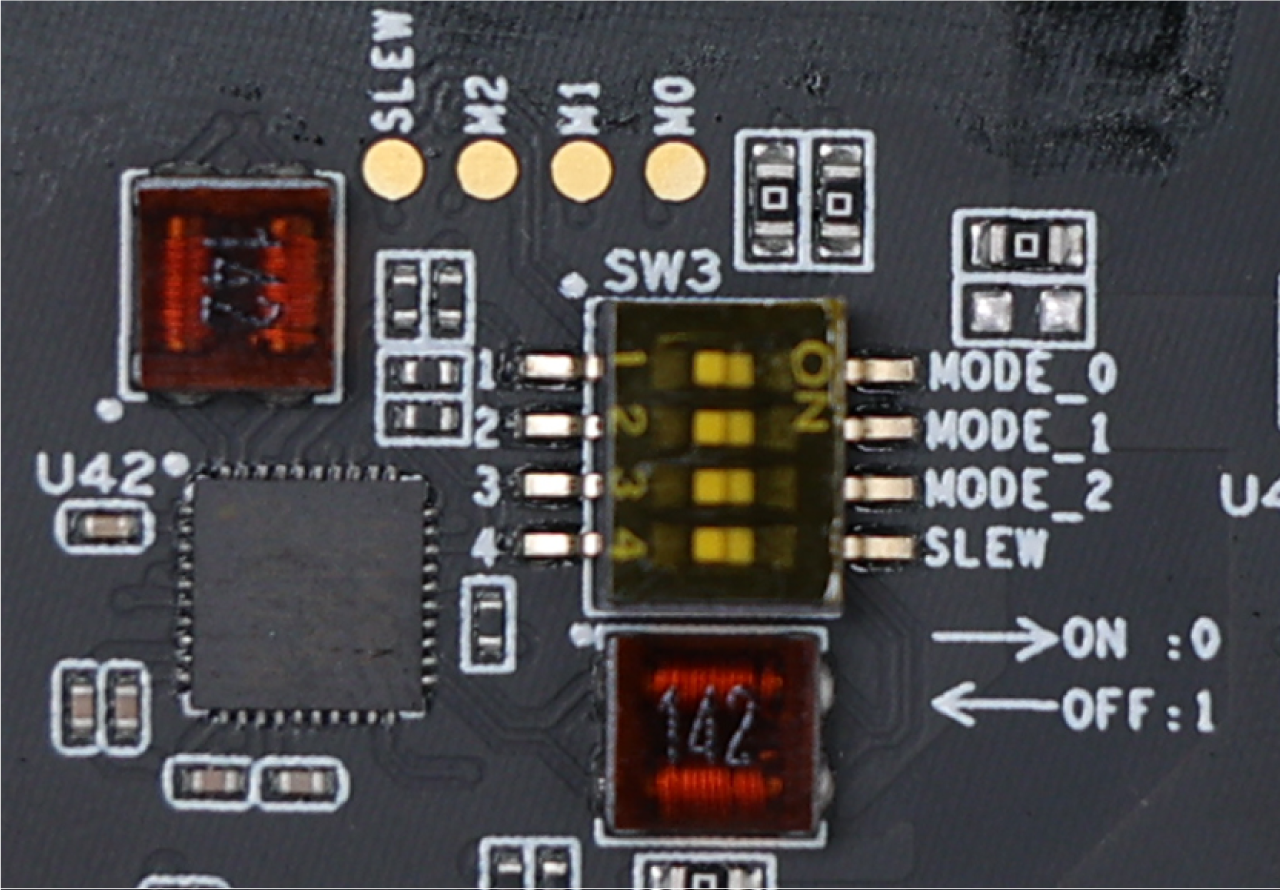
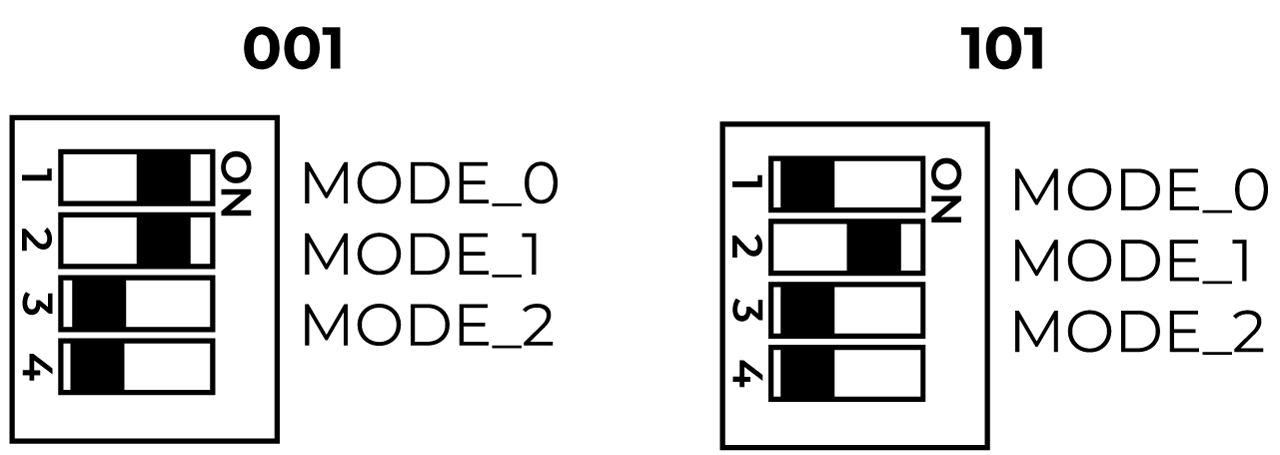
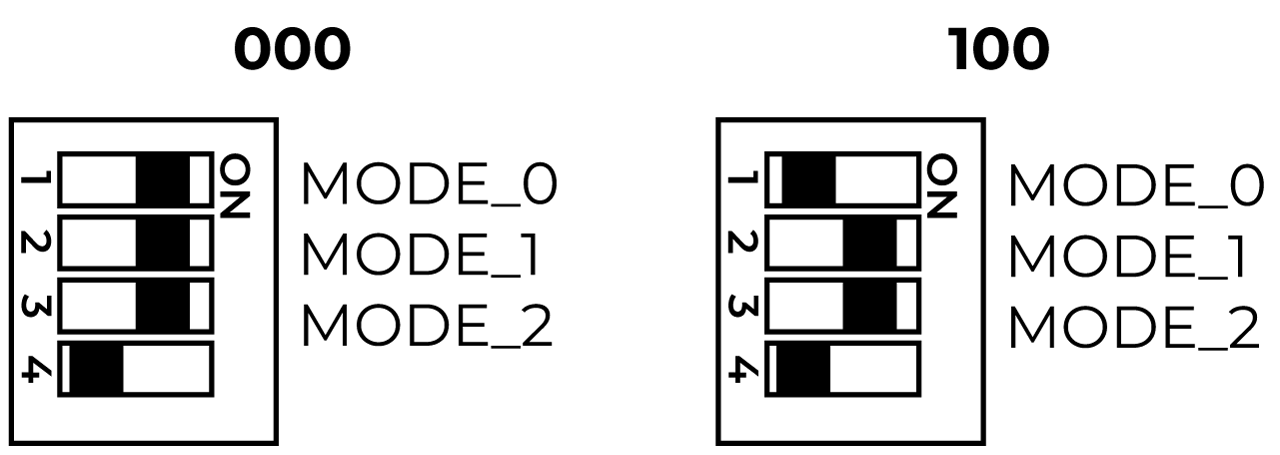
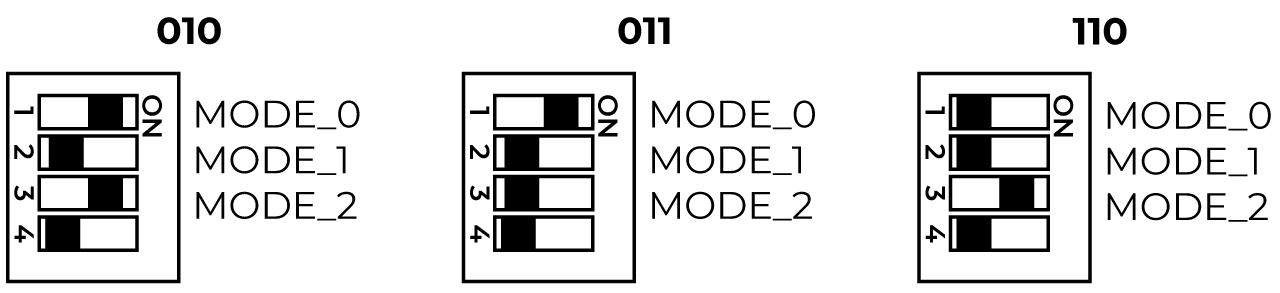
| + | MODE_0 | +MODE_1 | +MODE_2 | +模式 | +状态 | +
|---|---|---|---|---|---|
 |
+ 0 | +0 | +0 | +RS-422 Full Duplex | +1T/1R RS-422 | +
 |
+ 0 | +0 | +1 | +Pure RS-232 | +3T/5R RS-232 | +
 |
+ 0 | +1 | +0 | +RS-485 Half Duplex | +1T/1R RS-485 ,TX ENABLE Low Active | +
 |
+ 0 | +1 | +1 | +RS-485 Half Duplex | +1T/1R RS-485 ,TX ENABLE High Active | +
 |
+ 1 | +0 | +0 | +RS-422 Full Duplex | +1T/1R RS-422 with termination resistor | +
 |
+ 1 | +0 | +1 | +Pure RS-232 | +1T/1R RS-232 co-exists with RS485 | +
| 无需总线即可进行的应用 | +|||||
| 开关集成电路(用于特殊用途) | +|||||
 |
+ 1 | +1 | +0 | +RS-485 Half Duplex | +1T/1R RS-485 with termination resistor | +
| TX ENABLE 低电平有效 | +|||||
 |
+ 1 | +1 | +1 | +Low Power | +All I/O pins are High Impedance | +
| 关机 | +
| + | 状态 | +注意 | +
|---|---|---|
 |
+ 1 | +SLEW= Vcc 这种RS232 / RS422 / RS485多协议收发器限制了通信速率,如下所示: RS-232:最大数据率为1.5Mbps RS-485 / RS-422:最大数据率为10Mbps 实际的最大数据速率取决于所使用的Jetson SO使用情况。 |
+
 |
+ 0 | +SLEW = GND RS-232:最大数据率为250Kbps RS-485 / RS-422:最大数据率为250Kbps。 |
+
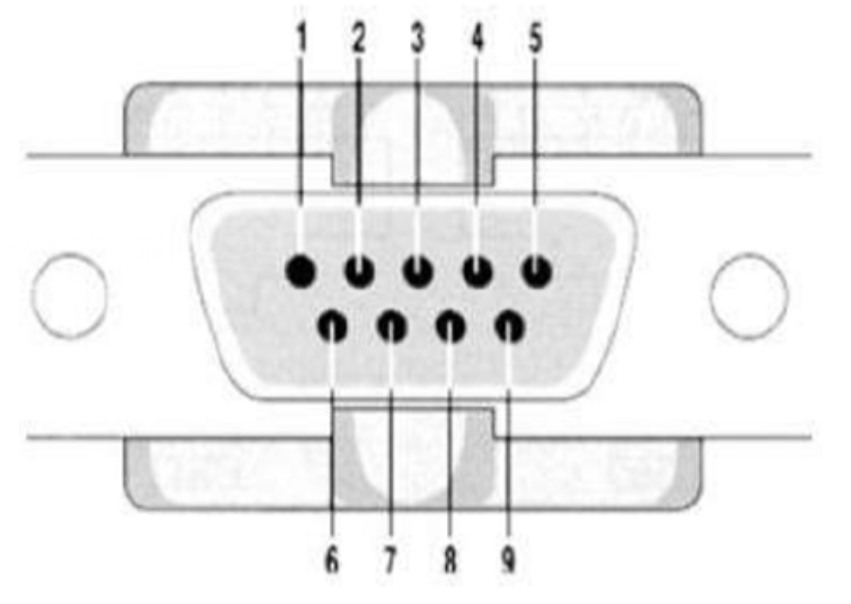
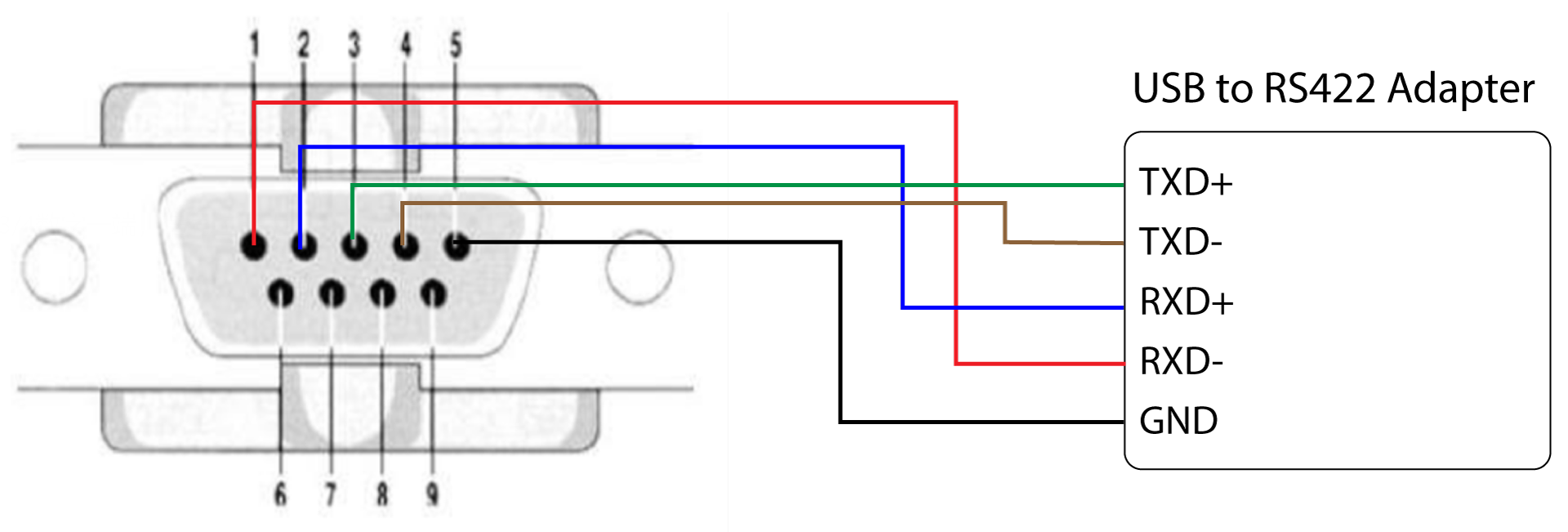
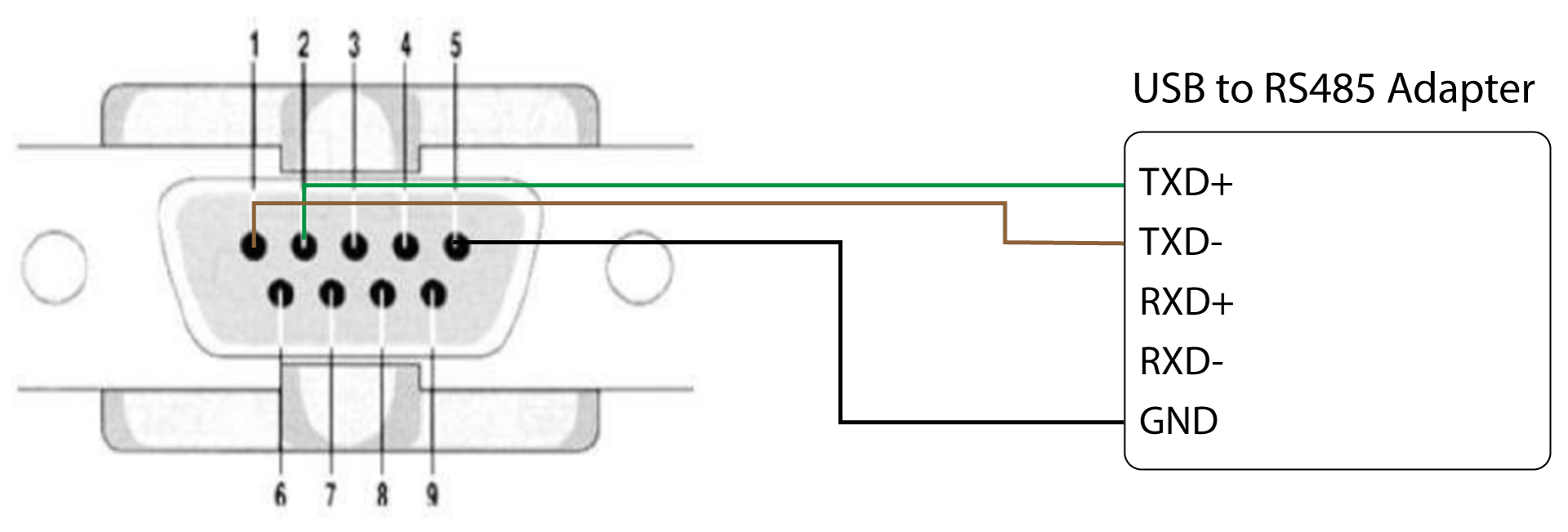
| MODE | +001/101 | +000/100 | +010/011/110 | +
|---|---|---|---|
| PIN | +RS232 | +RS422 | +RS485 | +
| 1 | ++ | TXD- | +Data- | +
| 2 | +RXD | +TXD+ | +Data+ | +
| 3 | +TXD | +RXD+ | ++ |
| 4 | ++ | RXD- | ++ |
| 5 | +GND | +GND | +GND | +
| 6 | ++ | + | + |
| 7 | +RTS | ++ | + |
| 8 | +CTS | ++ | + |
| 9 | ++ | + | + |





| Type | +Label Name | +Schematic Signal | +Module Pin Number | +BGA Number | +GPIO Number | +V/A Limits | +Note | +
|---|---|---|---|---|---|---|---|
| Input | +DI1 | +DI_1_GPIO01 | +118 | +PQ.05 | +453 | +12V/ 20mA current in total | +12V Digital Input, ground signal needs to be connected to GND_DI (Pin2/4/6) |
+
| DI2 | +DI_2_GPIO09 | +211 | +PAC.06 | +492 | +|||
| DI3 | +DI_3_GPIO11 | +216 | +PQ.06 | +454 | +|||
| DI4 | +DI_4_GPIO13 | +228 | +PH.00 | +391 | +|||
| Output | +DO1 | +DO_1_GPIO | +193 | +PI.00 | +399 | +40V/40mA load per pin | +Digital output, maximum withstand voltage 40V, ground signal needs to be connected to GND_DO(Pin8/10) |
+
| DO2 | +DO_2_GPIO | +195 | +PI.01 | +400 | +|||
| DO3 | +DO_3_GPIO | +197 | +PI.02 | +401 | +|||
| DO4 | +DO_4_GPIO | +199 | +PH.07 | +398 | +|||
| CAN | +CH | +/ | +CAN bus with standard differential signals, ground signal needs to be connected to GND_ISO (Pin 12) |
+ ||||
| CL | +|||||||
| Ground | +GND_DI | +/ | +The reference ground signal for the 12V Digital Input, which is also the return path for the DI |
+ ||||
| GND_DO | +The reference ground signal of the digital output, which is also the return path of the DO | +||||||
| CG | +The reference ground signal for CAN | +
| + | MODE_0 | +MODE_1 | +MODE_2 | +模式 | +状态 | +
|---|---|---|---|---|---|
|
+ 0 | +0 | +0 | +RS-422 Full Duplex | +1T/1R RS-422 | +
|
+ 0 | +0 | +1 | +Pure RS-232 | +3T/5R RS-232 | +
|
+ 0 | +1 | +0 | +RS-485 Half Duplex | +1T/1R RS-485 ,TX ENABLE Low Active | +
|
+ 0 | +1 | +1 | +RS-485 Half Duplex | +1T/1R RS-485 ,TX ENABLE High Active | +
|
+ 1 | +0 | +0 | +RS-422 Full Duplex | +1T/1R RS-422 with termination resistor | +
|
+ 1 | +0 | +1 | +Pure RS-232 | +1T/1R RS-232 co-exists with RS485 | +
| 无需总线即可进行的应用 | +|||||
| 开关集成电路(用于特殊用途) | +|||||
|
+ 1 | +1 | +0 | +RS-485 Half Duplex | +1T/1R RS-485 with termination resistor | +
| TX ENABLE 低电平有效 | +|||||
|
+ 1 | +1 | +1 | +Low Power | +All I/O pins are High Impedance | +
| 关机 | +
| + | 状态 | +注意 | +
|---|---|---|
|
+ 1 | +SLEW= Vcc 这种RS232 / RS422 / RS485多协议收发器限制了通信速率,如下所示: RS-232:最大数据率为1.5Mbps RS-485 / RS-422:最大数据率为10Mbps 实际的最大数据速率取决于所使用的Jetson SO使用情况。 |
+
|
+ 0 | +SLEW = GND RS-232:最大数据率为250Kbps RS-485 / RS-422:最大数据率为250Kbps。 |
+
| MODE | +001/101 | +000/100 | +010/011/110 | +
|---|---|---|---|
| PIN | +RS232 | +RS422 | +RS485 | +
| 1 | ++ | TXD- | +Data- | +
| 2 | +RXD | +TXD+ | +Data+ | +
| 3 | +TXD | +RXD+ | ++ |
| 4 | ++ | RXD- | ++ |
| 5 | +GND | +GND | +GND | +
| 6 | ++ | + | + |
| 7 | +RTS | ++ | + |
| 8 | +CTS | ++ | + |
| 9 | ++ | + | + |

| reComputer Jetson®J10X/J20X入门 | +Jetson®J10X/J20X的硬件布局 | +
|---|---|
 |
+  |
+
| 按照说明操作,连接外围设备,您可以在几秒钟内通电并直接使用它。 | +您将在此处了解Jetson系列reComputer J10/J20硬件布局的基本概念。 | +
| + | + |
| reComputer Jetson®J30X/J40X入门 | +reComputer Jetson®J30X/J40X的硬件布局 | +
|---|---|
|
+ |
+
| 按照说明操作,连接外围设备,您可以在几秒钟内通电并直接使用它。 | +您将在此处了解Jetson系列reComputer J30/J40硬件布局的基本概念。 | +
| + | + |
| reComputer-Jetson® J1010/J101 | +reComputer-Jetson® J1020v1/A206 | +reComputer-Jetson® J1020v2/J202 | +
|---|---|---|
 |
+  |
+  |
+
| + | + | + |
| reComputer-Jetson® J30X/J40X | +reComputer-Jetson® A603 | +reComputer-Jetson® A607 | +
|---|---|---|
 |
+  |
+  |
+
| + | + | + |
| reComputer-Jetson® A203 | +reComputer-Jetson® A205 | +reComputer-Jetson® Jetson Mate | +
|---|---|---|
 |
+  |
+  |
+
| + | + | + |
| NVIDIA Jetson上的语音字幕生成 | +在NVIDIA Jetson Orin上部署Whisper,实现实时语音转文本 | +如何在reComputer上运行本地LLM文本到图像 | +
|---|---|---|
|
+ |
+ |
+
| 在这个wiki中,我们向您介绍Jetson上的语音字幕生成,它可以提供实时语音到字幕服务,同时避免互联网上的信息泄露。 | +在本wiki中,我们向您介绍Jetson上的实时耳语,这种集成可以直接在设备上进行语音处理,消除了对持续网络连接的需求,增强了隐私和安全性。 | +这个wiki包括在英伟达Jetson Orin NX 16GB上建立和部署本地基于LLM的文本到图像生成模型 | +
| + | + | + |
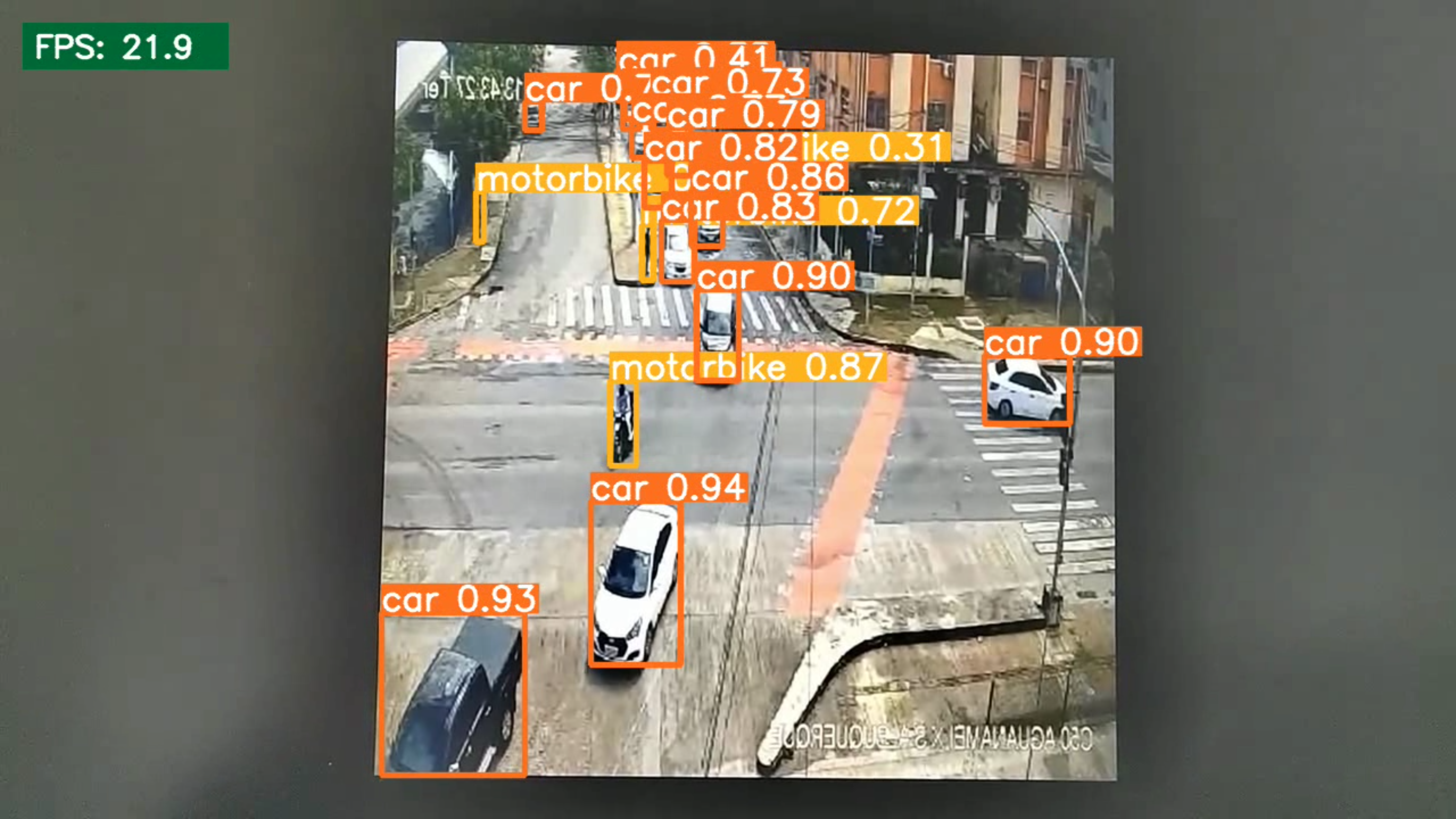
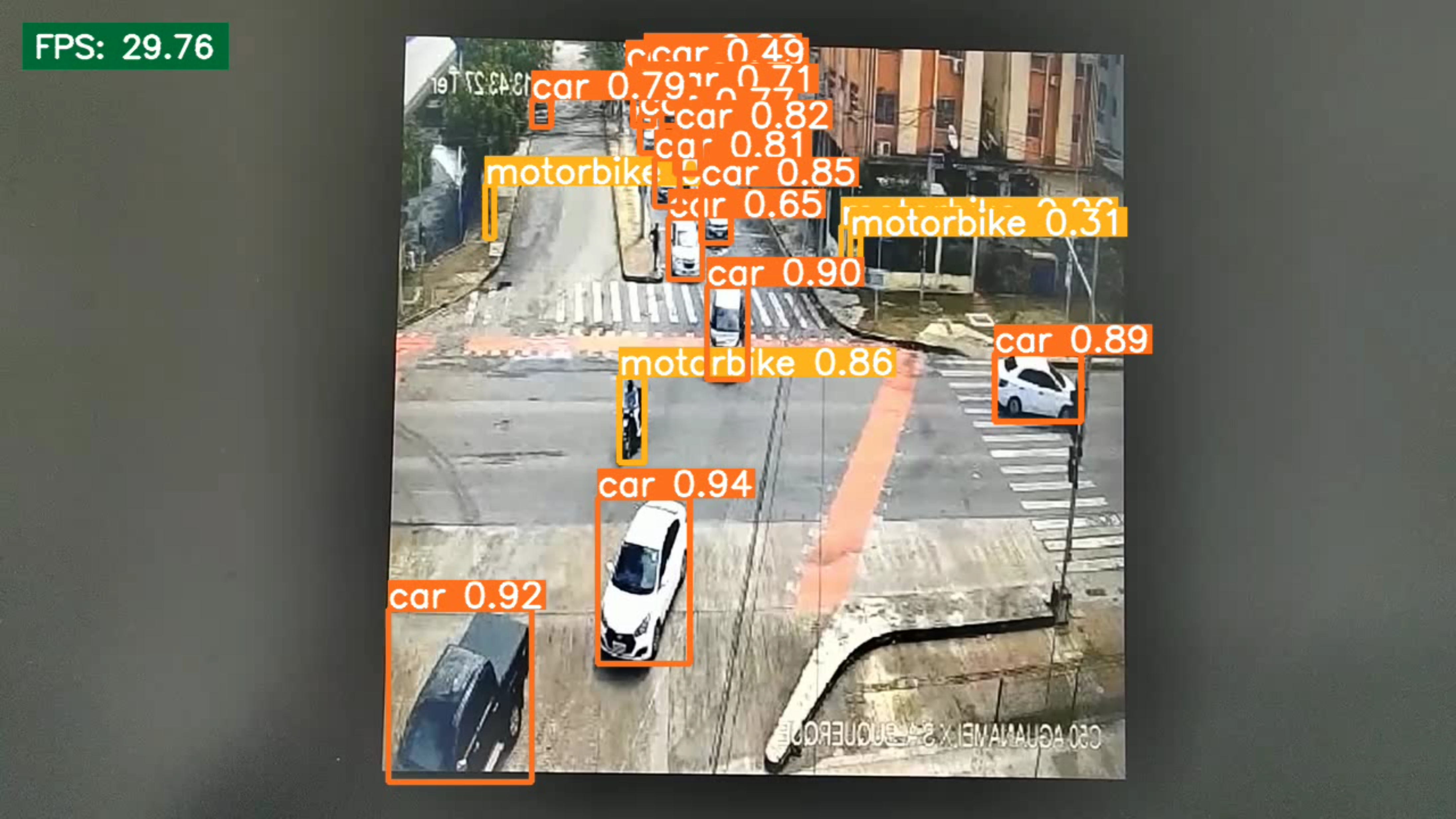
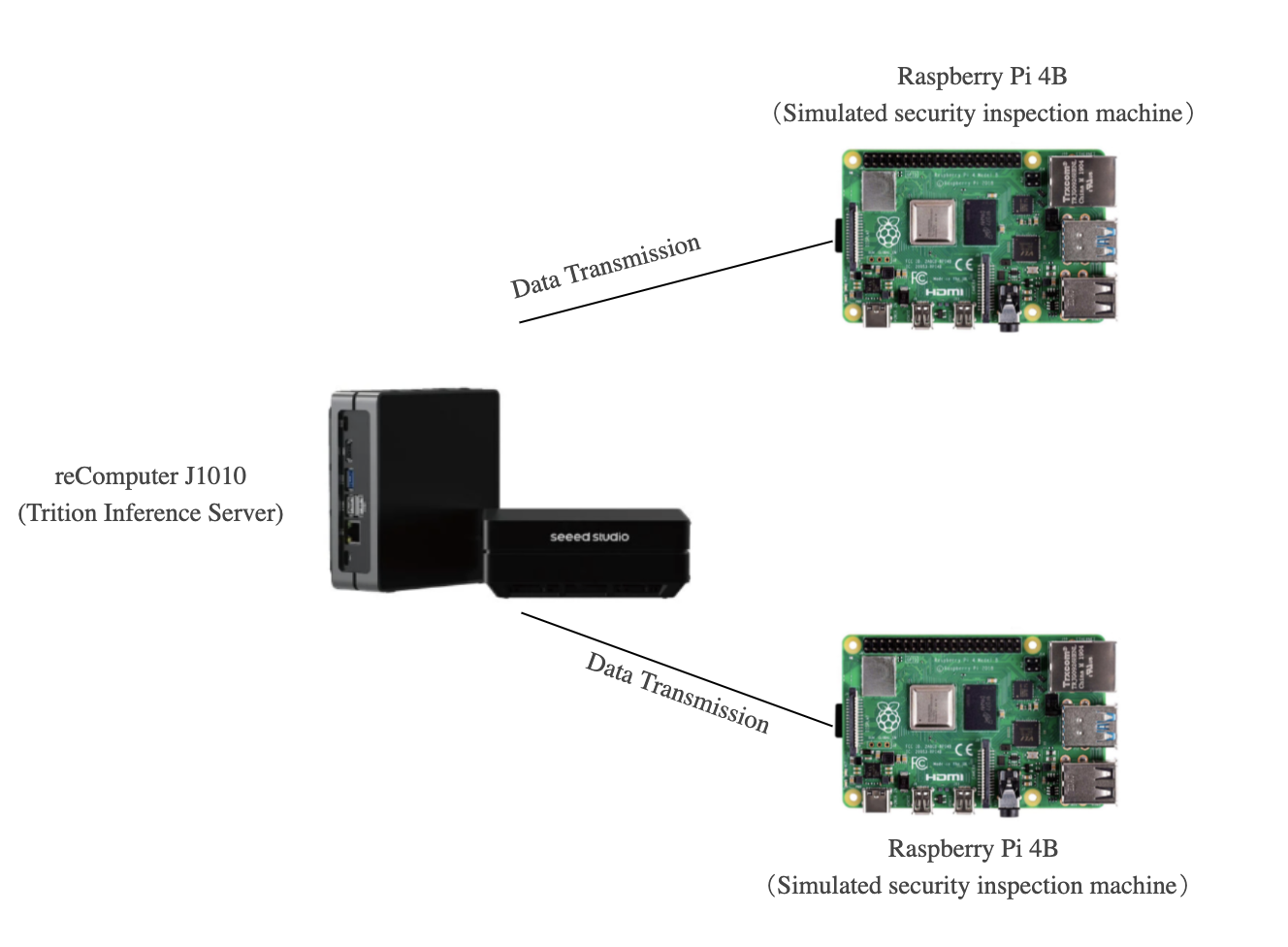
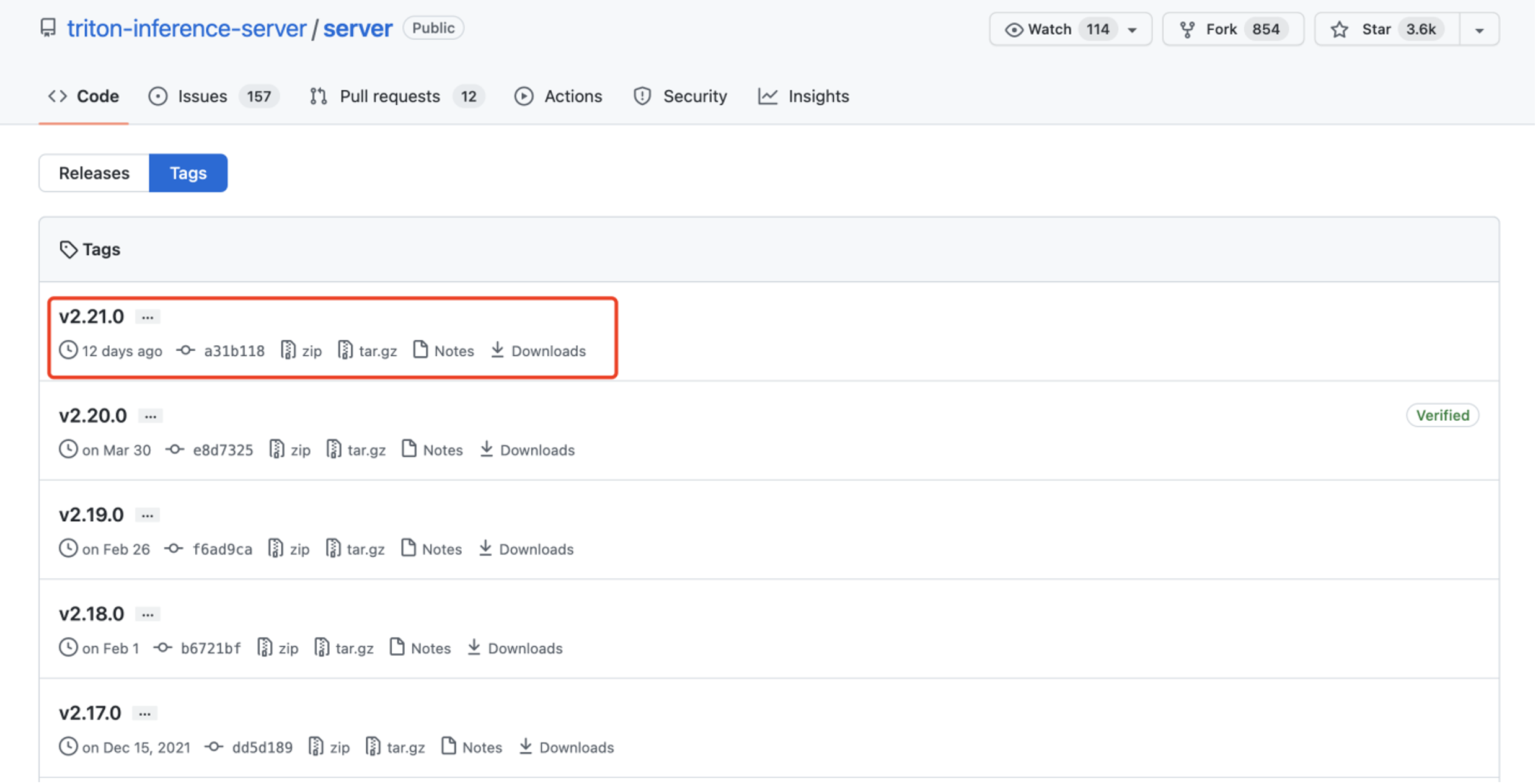
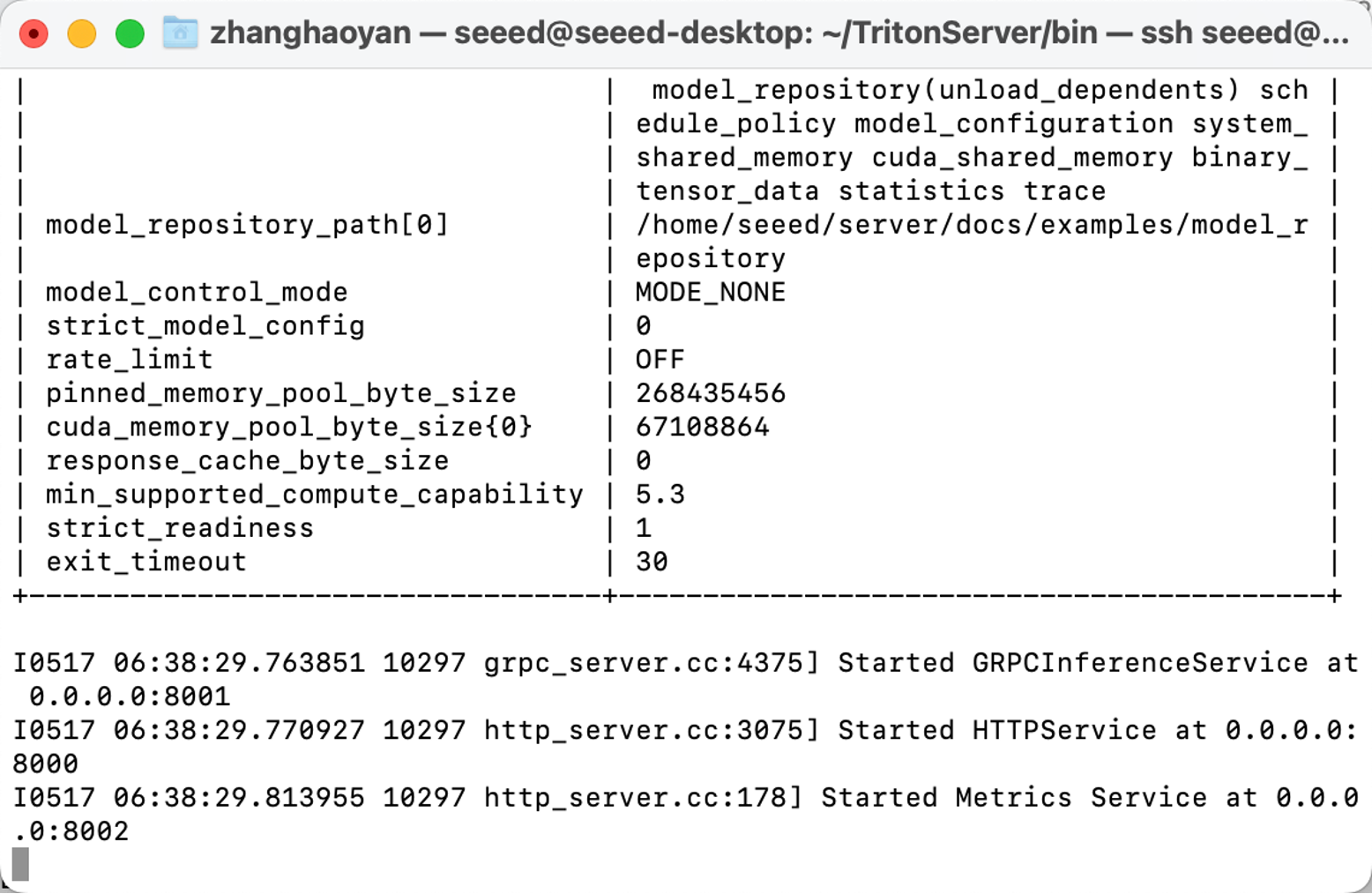
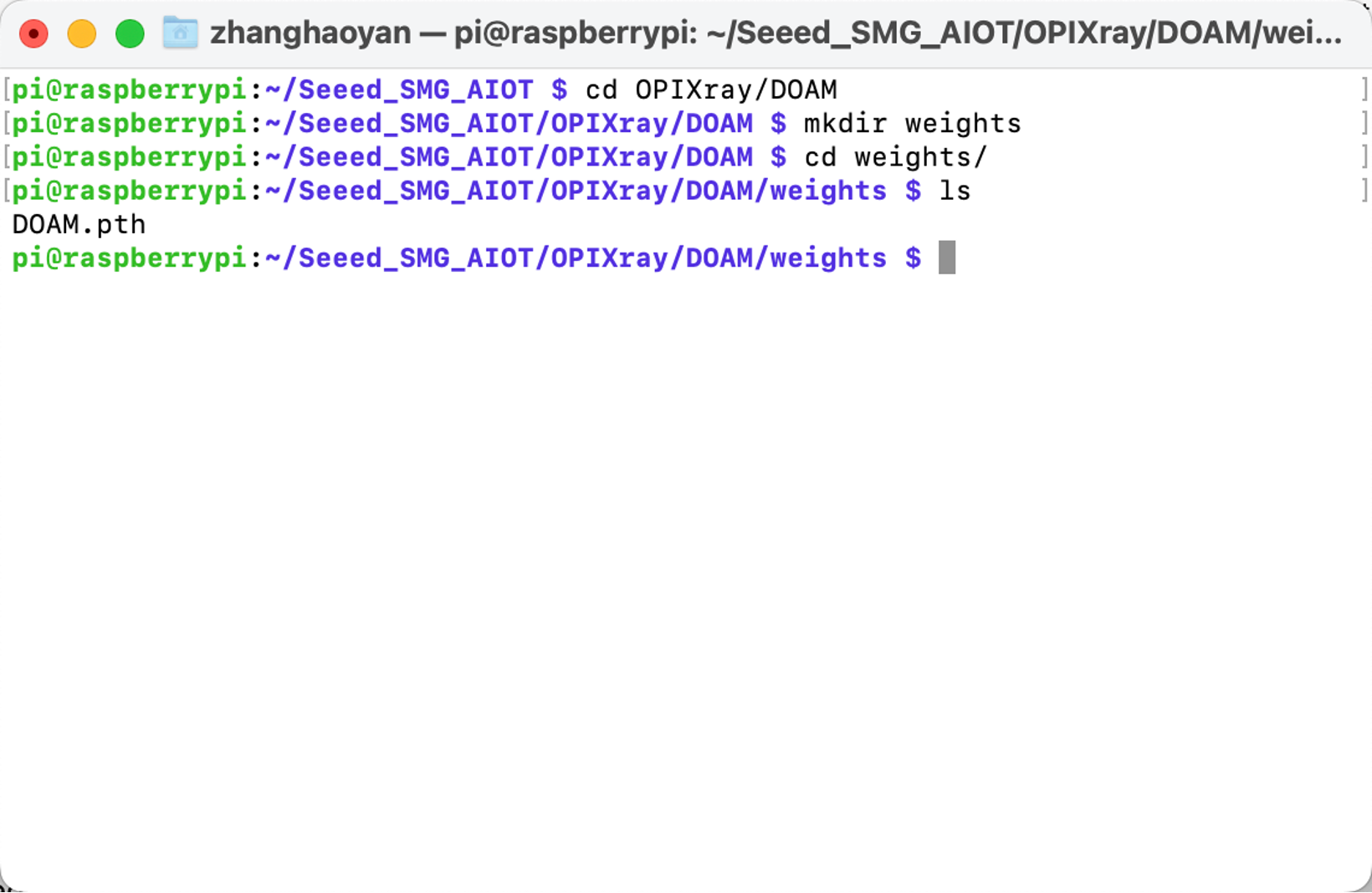
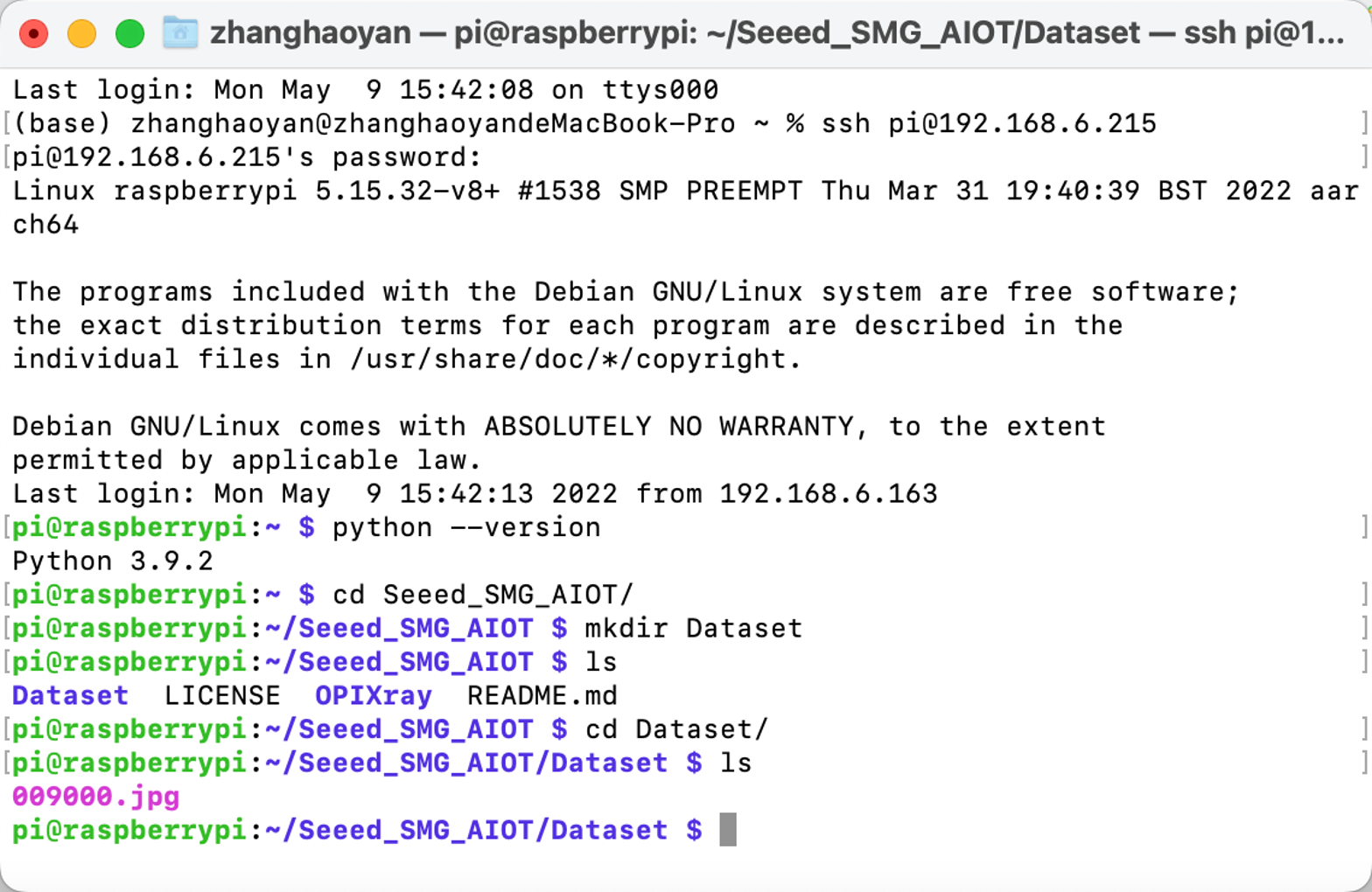
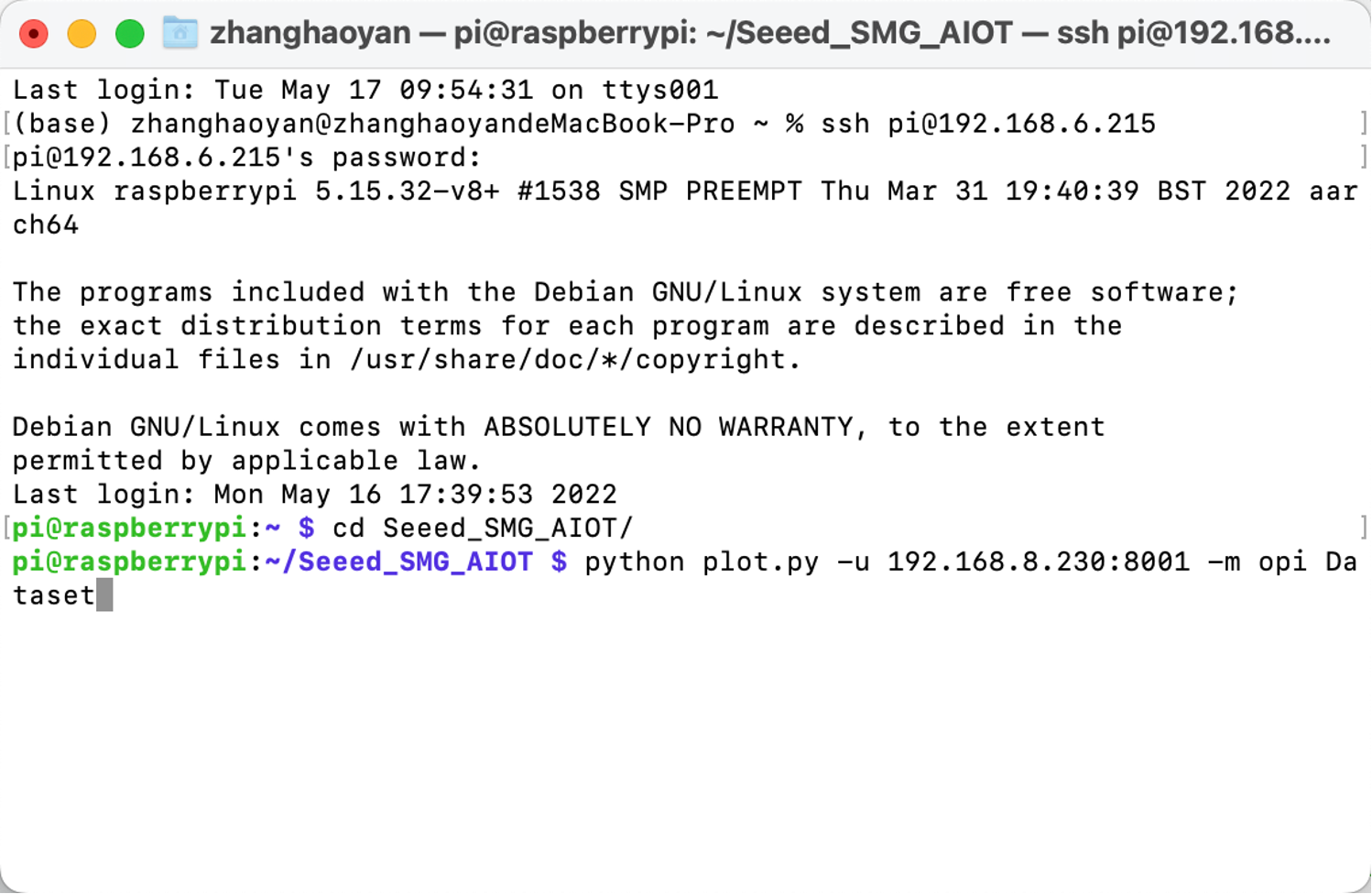
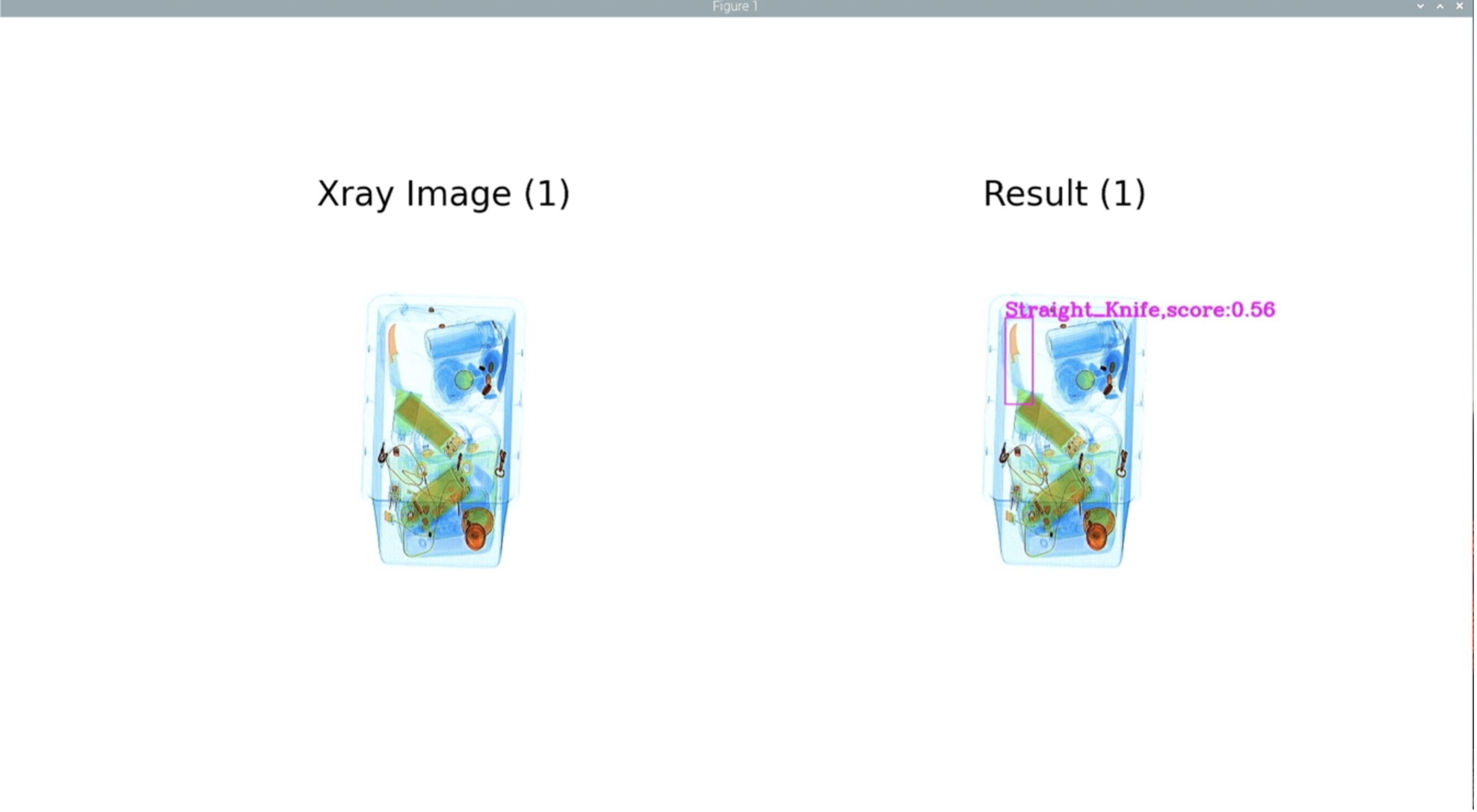
| Jetson上用MLC LLM量化Llama2-7B | +刀具检测:基于reComputer的Triton推理服务器上部署的目标检测模型 | +使用无代码边缘AI工具在Jetson上部署检测模型 | +
|---|---|---|
|
+ |
+  |
+
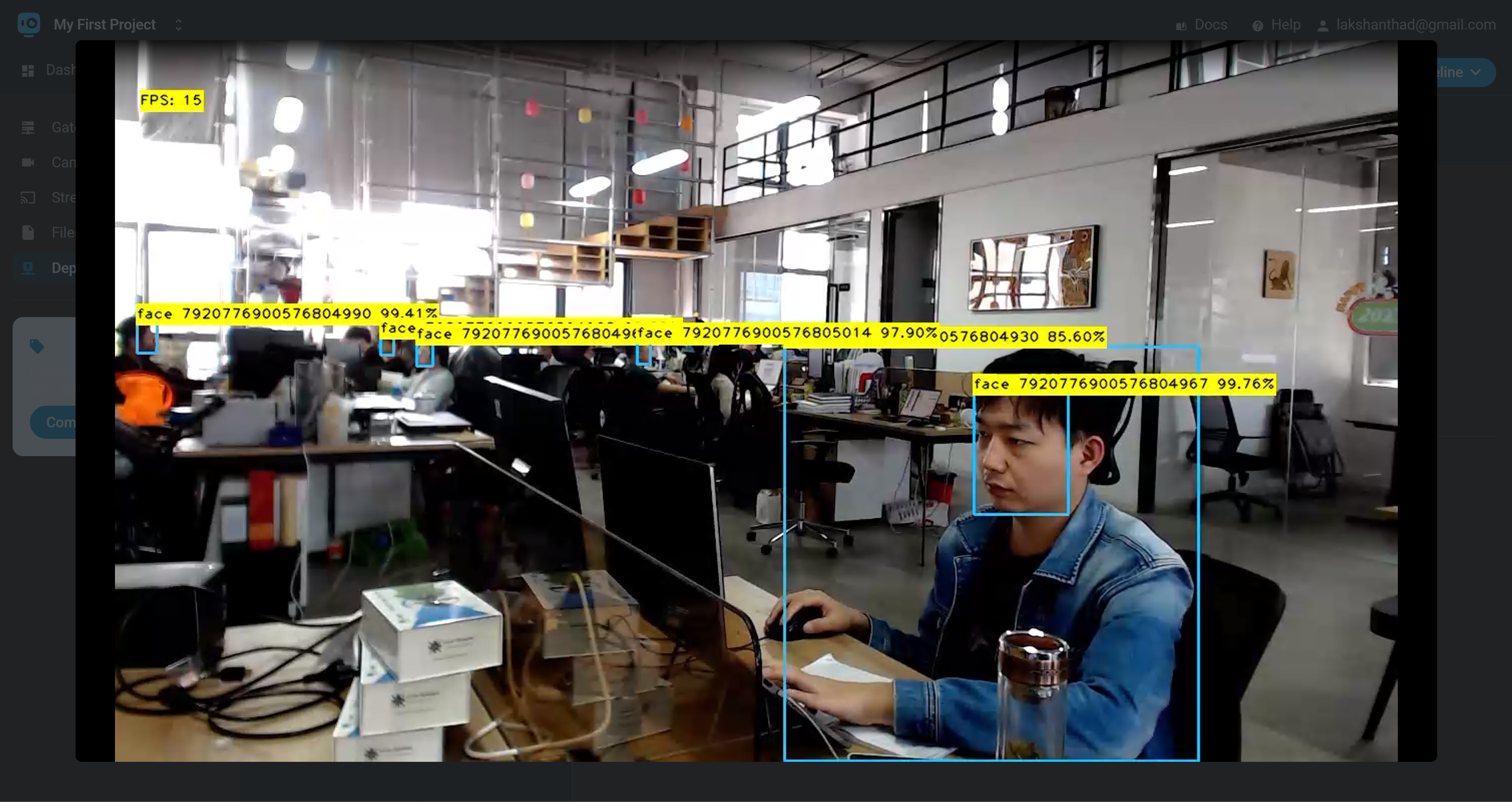
| 在这个项目中,我们引入了Llama2-7B的量化版本,这是一个在1.5TB数据上训练的大型语言模型,并将其部署在Jetson-Orin上。 | +我们提供了一个基础项目,我们将在reComputer J1010上部署一个深度学习模型来检测违禁物品。 | +在wiki中,我们将介绍如何在新的NVIDIA Jetson系统下下载和安装所需的内容,然后打开Edge AI工具并使用实时摄像头进行对象检测。 | +
| + | + | + |
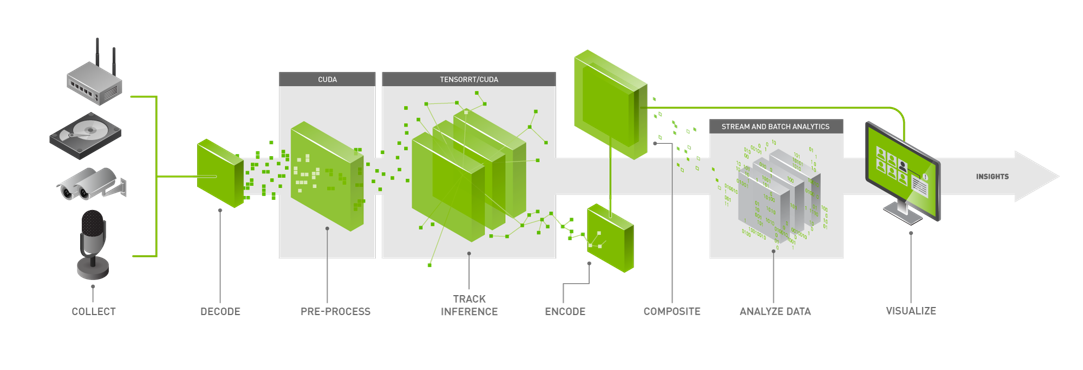
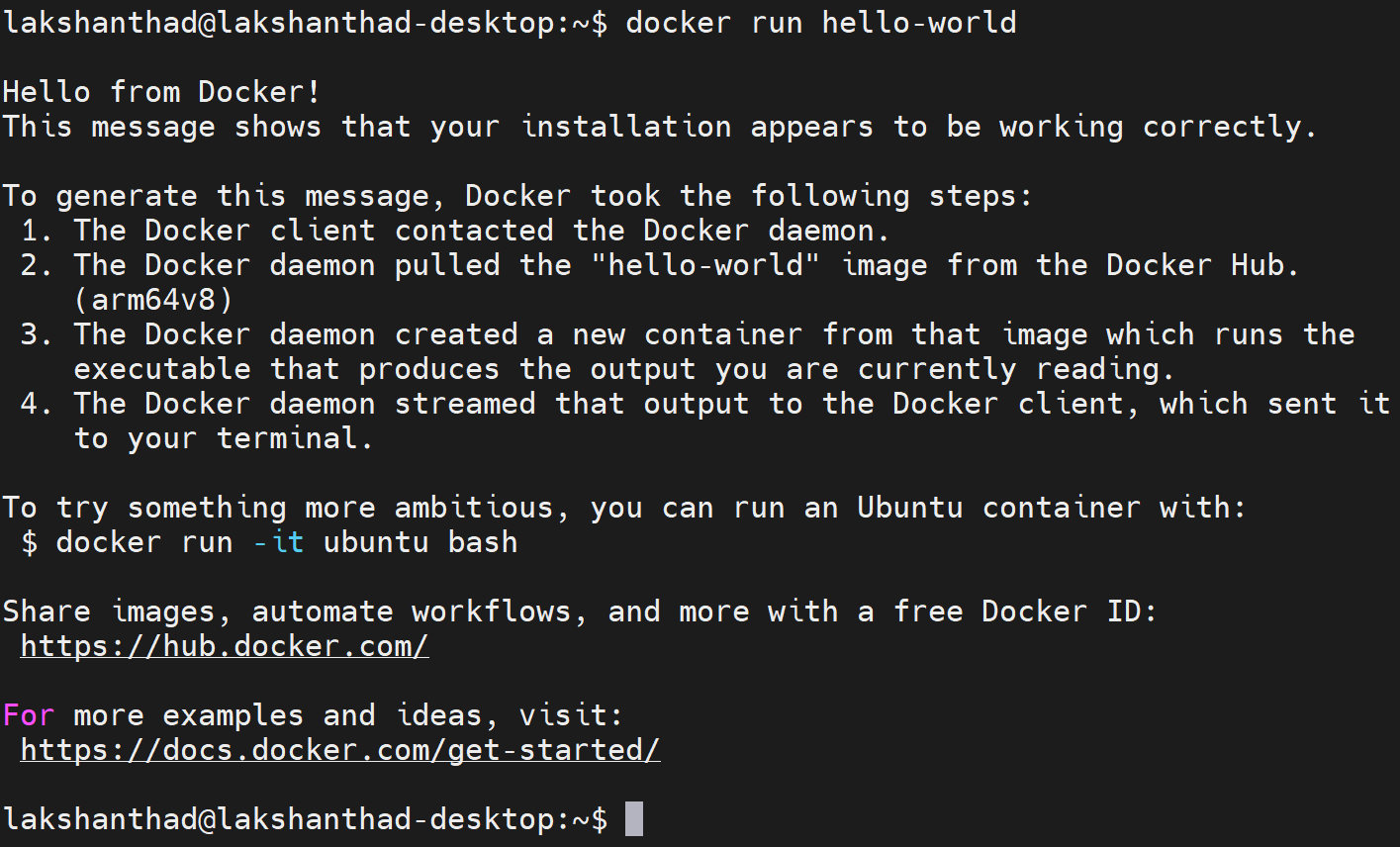
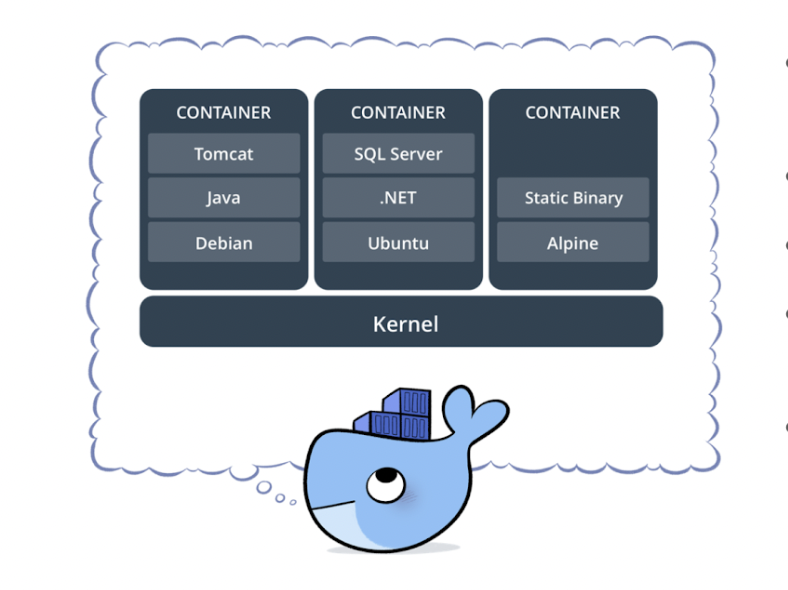
| DashCamNet和PeopleNet与Jetson Xavier NX多摄像头 | +基于DeepStream SDK的智能交通管理系统 | +Docker入门 | +
|---|---|---|
 |
+ |
+ |
+
| 在这个wiki中,我们在Jetson上部署了一个TAO预训练模型,并实现了高速推理。 | +对于这个AI视觉应用程序,我们将使用NVIDIA的DeepStream SDK,并在NVIDIA Jetson设备上进行边缘推理。 | +在这个wiki中,我们尝试在Jetson上安装Docker Compose并运行Docker容器。 | +
| + | + | + |
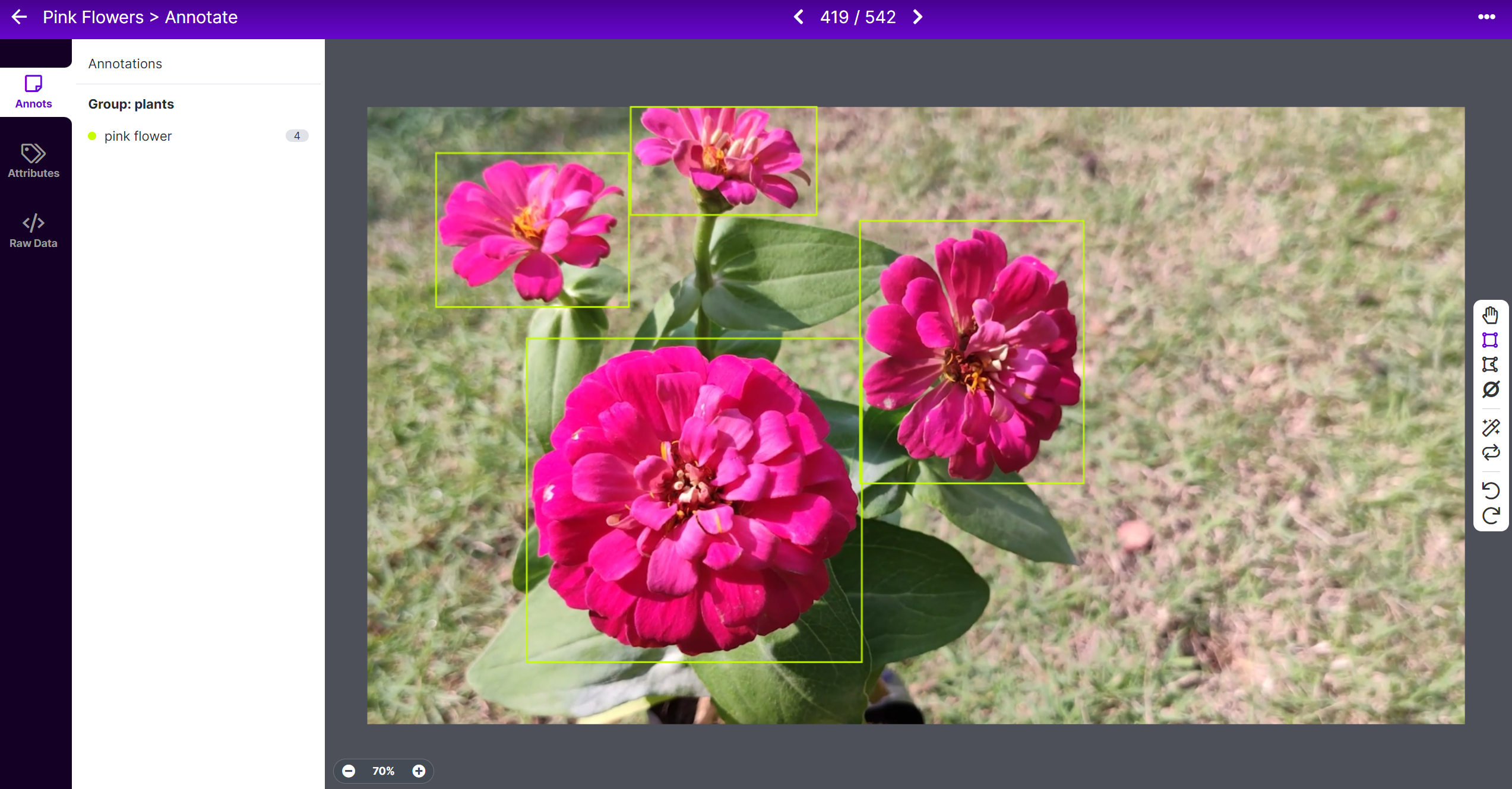
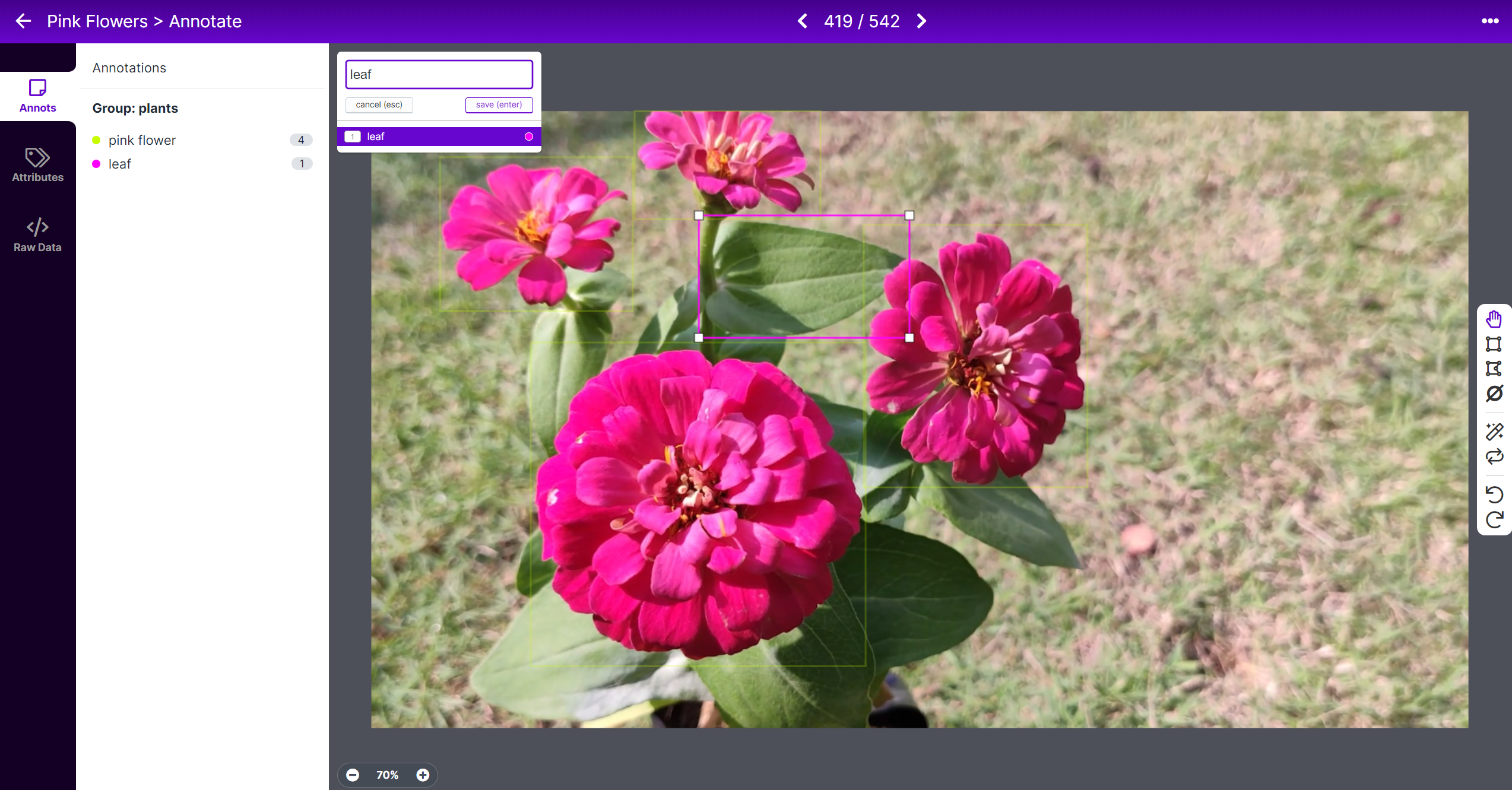
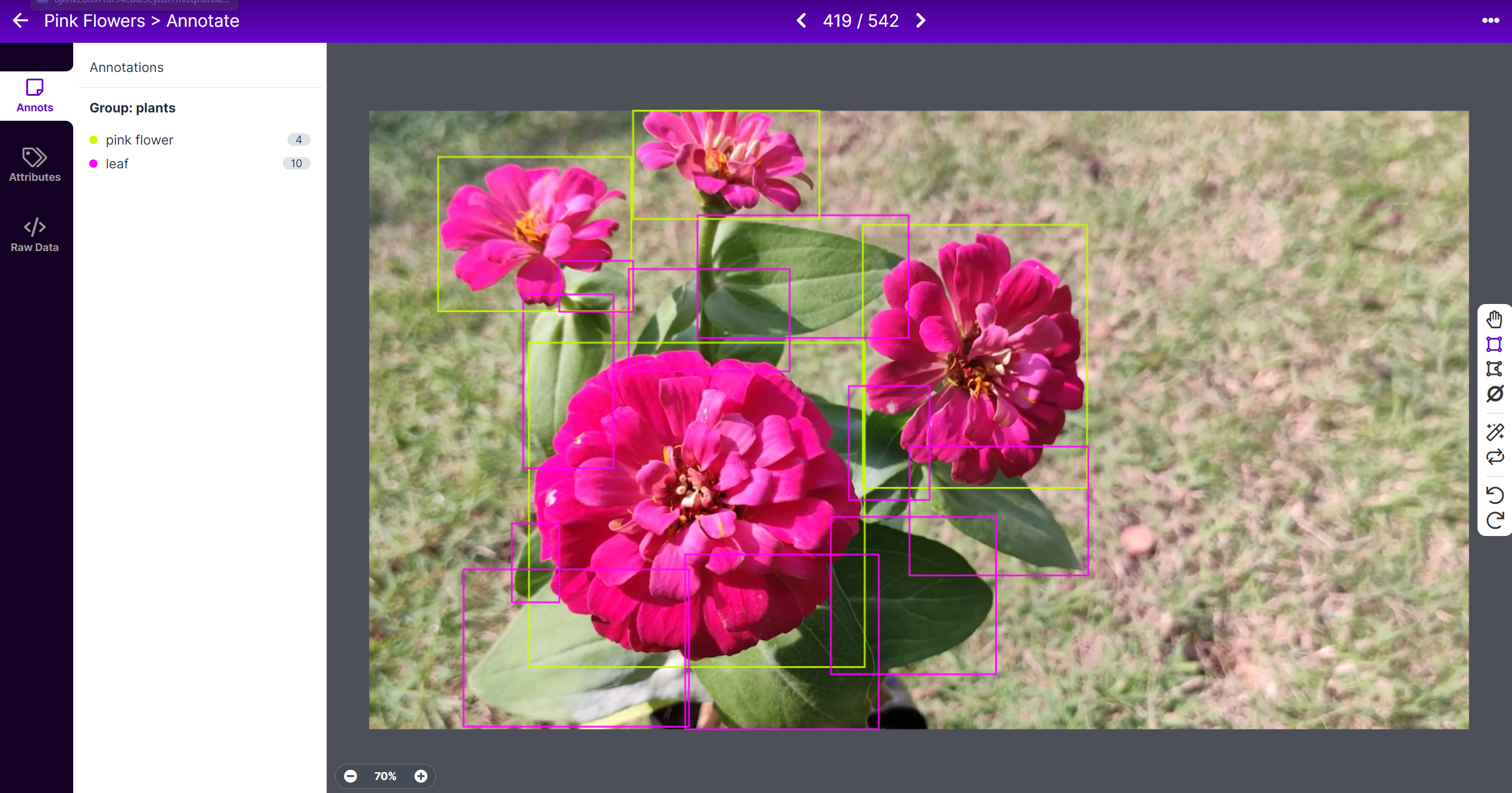
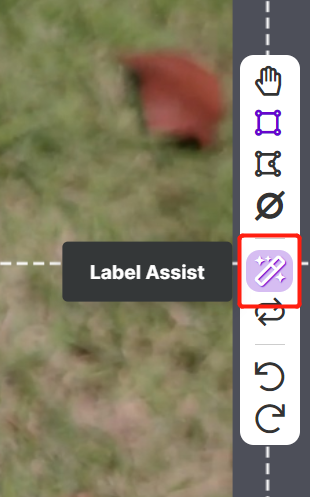
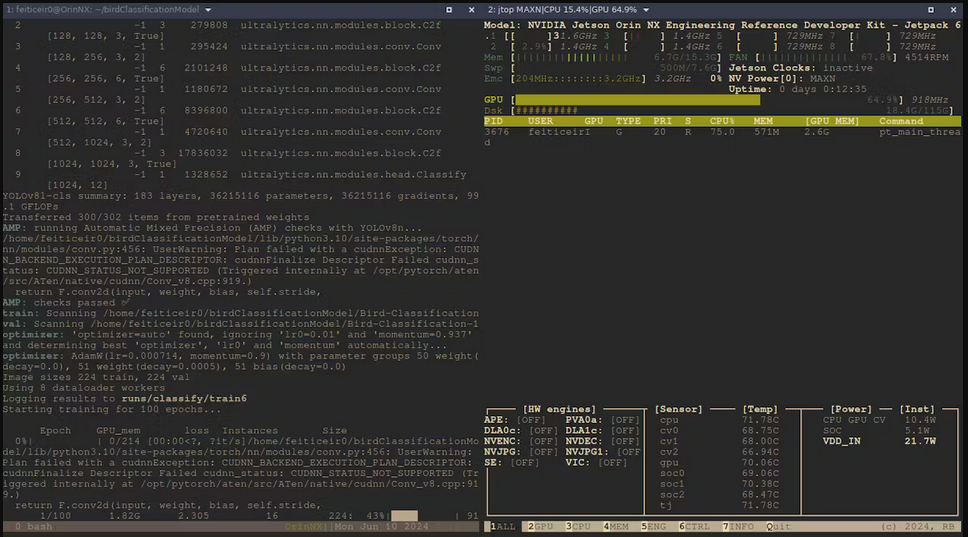
| 使用Allxon通过无线方式更新Jetson Linux | +如何在reComputer上训练和部署YOLOv8 | +Maskcam-基于Jetson Nano的人群口罩使用监测 | +
|---|---|---|
 |
+ |
+  |
+
| Allxon可以帮助您上传OTA Payload包并确保其正常工作。您稍后将在本维基中遇到此步骤。 | +在这个wiki中,我们在reComputer J4012上训练和部署了一个交通场景的对象检测模型。 | +在这个wiki中,我们使用Jetson实现了一个掩码检测功能。 | +
| + | + | + |










| 规格说明 | +reComputer J1010 | +reComputer J1020 | +NVIDIA Jetson Nano Developer Kit-B01 | +
|---|---|---|---|
| 模块 | +Jetson Nano 4GB (正式版本) | +Nano (非生产版本) | +|
| 储存 | +16 GB eMMC | +MicroSD (不包含卡) | +|
| SD卡插槽 | +包括在载板上 | +- | +包括在内(模块上) | +
| 视频编码器 | +4K30 | 2x1080p60 | 4x1080p30 | 4x720p60 | 9x720p30 (H.265 & H.264) | +4Kp30 | 4x 1080p30 | 9x 720p30 (H.264/H.265) | +|
| 视频解码器 | +4K60 | 2x 4K30 | 4x 1080p60 | 8x 1080p30 | 9x 720p60 (H.265 & H.264) + | +4Kp60 | 2x 4Kp30 | 8x 1080p30 | 18x 720p30 (H.264/H.265) | +|
| 千兆以太网 | +1*RJ45 Gigabit Ethernet Connector (10/100/1000) | +||
| USB | +1 * USB 3.0 Type A; +2 * USB 2.0 Type A; +1 * USB Type C for device mode; +1 * USB Type C for 5V power input | +4 * USB 3.0 Type-A ; +1 * Micro-USB port for device mode; | +4 * USB 3.0 Type-A; +1 * Micro-USB port for 5V power input or for device mode | +
| CSI相机连接 | +2*CSI Camera (15 pos, 1mm pitch, MIPI CSI-2 ) | +||
| 显示 | +1*HDMI Type A | +1*HDMI Type A; +1*DP | +|
| 风扇 | +1* FAN Connector (5V PWM) | +1* FAN (5V PWM) | +|
| M.2 KEY E | +1*M.2 Key E | +1*M.2 Key E (Disabled) | +1*M.2 Key E | +
| M.2 KEY M | +- | +1*M.2 Key M | +- | +
| RTC | +RTC套接字(保留) | +- | +|
| 多功能接口 | +1* 40-Pin header | +||
| 电源 | +USB-Type C 5V⎓3A | +DC Jack 12V/2A | +DC Jack 5V⎓4A; +Micro-USB 5V⎓2A | +
| 尺寸 | +130 mm x 120 mm x 50 mm (with case) | +100 mm x 80 mm x 29 mm | +|

| 产品 | +reComputer J1020 | +reComputer J2011 | +reComputer J2012 | +reComputer J2021 | +
|---|---|---|---|---|
| SKU + | 110061361 | +110061363 | +110061401 | +110061381 | +
| 产品图 + |  |
+ |
+ |
+ |
+
| 配备的模块 + | Jetson Nano 4G | +Jetson Xavier NX 8GB | +Jetson Xavier NX 16GB | +Jetson Xavier NX 8GB | +
| 操作载体板 + | Jetson A206 | +Jetson A206 | +Jetson A206 | +J202 | +
| + | software and hardware requirements | +
|---|---|
| reComputer for Jetson + | JetPack versions 4.4 ~ 4.6 + Carrier board must contain M.2 M-Key slot |
+
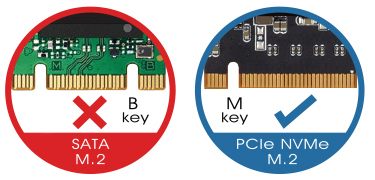
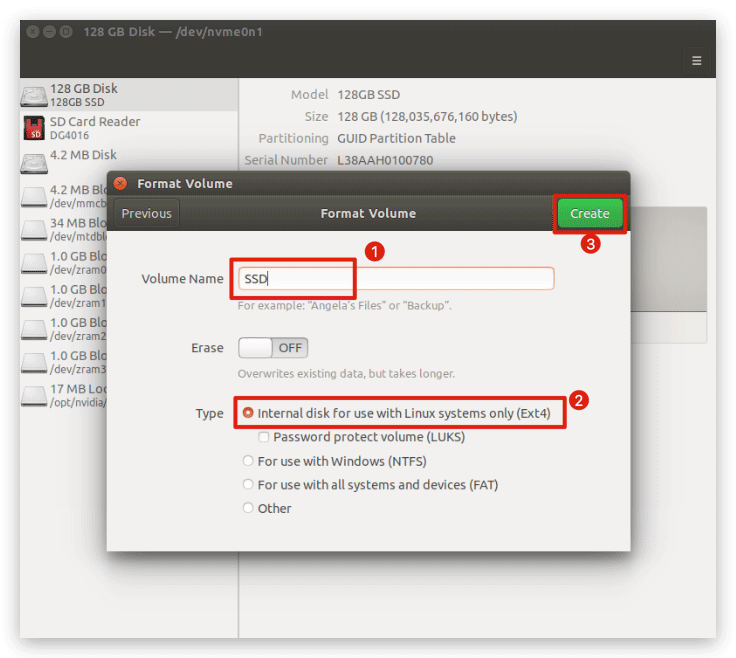
| SSD + | SSD need to be fourth generation extended file system (Ext4) + M.2 M-Key interface with NVMe protocol + Recommended capacity ≤ 512 GB |
+
| 产品 | +reComputer J1010 | +
|---|---|
| SKU + | 110061362 | +
| 产品图 + |  |
+
| 模组 + | Jetson Nano 4G | +
| 载板 + | J1010 carrier board | +
| + | 软件和硬件要求 | +
|---|---|
| reComputer for Jetson + | JetPack versions 4.4 ~ 4.6 + 装备模块需要Jetson Nano |
+
| USB 存储设备 + | USB存储设备需要为第四代的扩展文件系统(Ext4)。 + USB存储设备电源供应电流 ≤ 0.5 A |
+
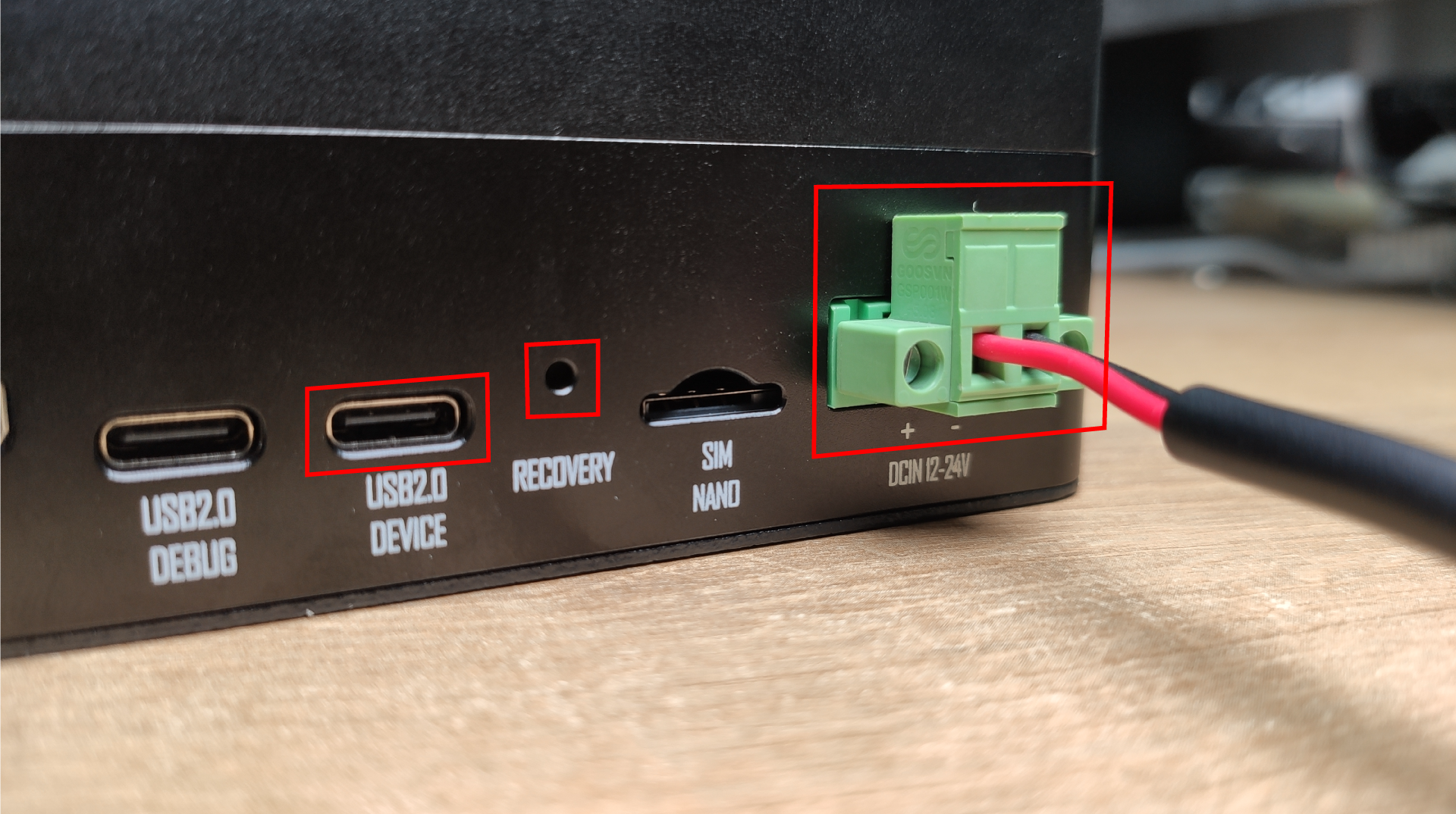
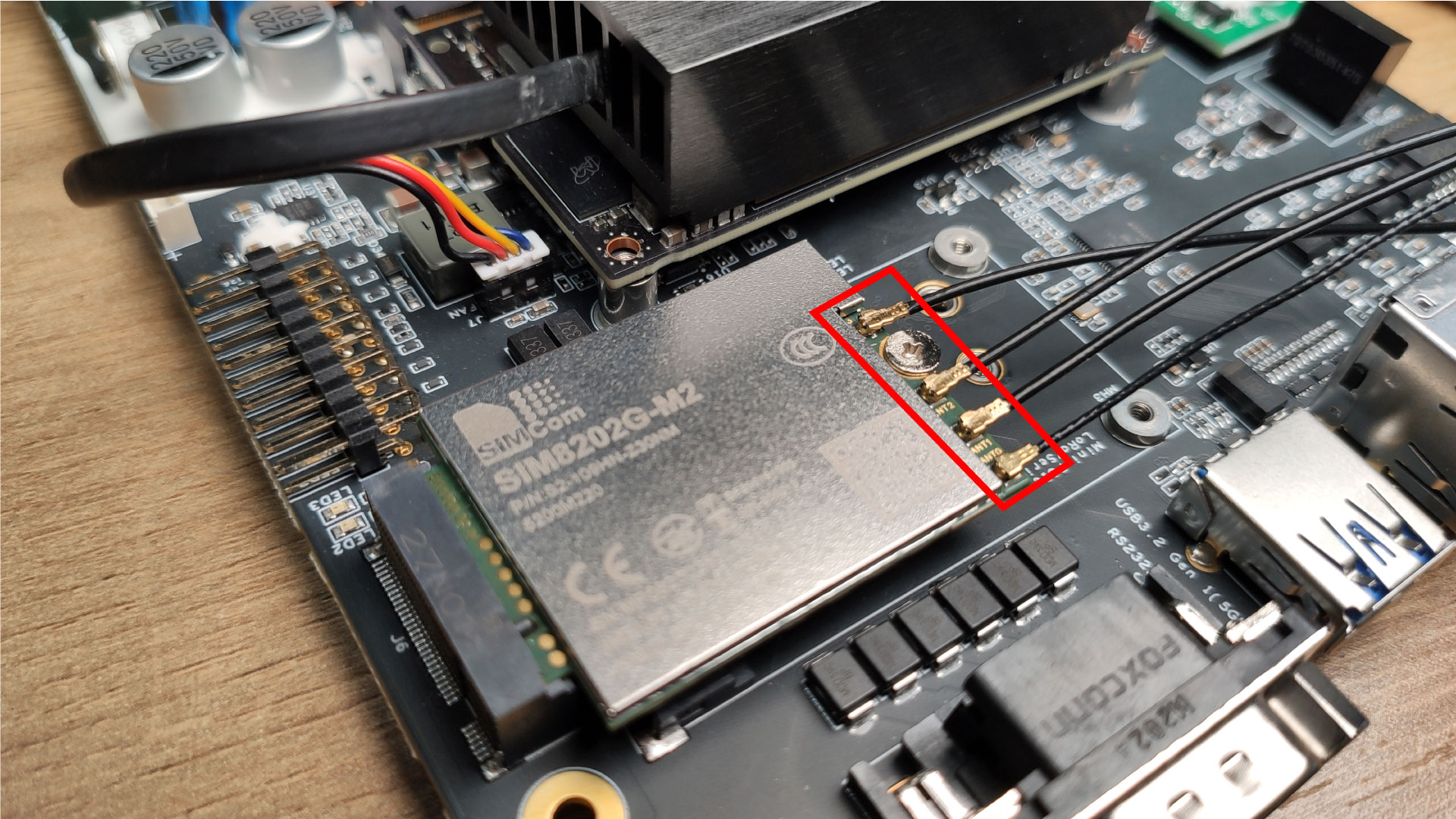
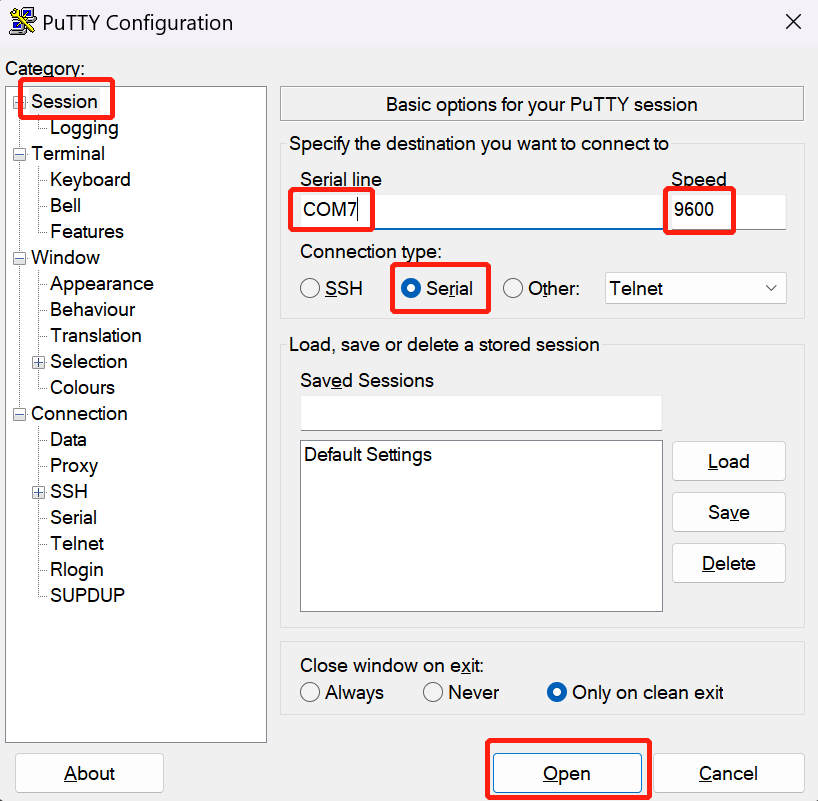
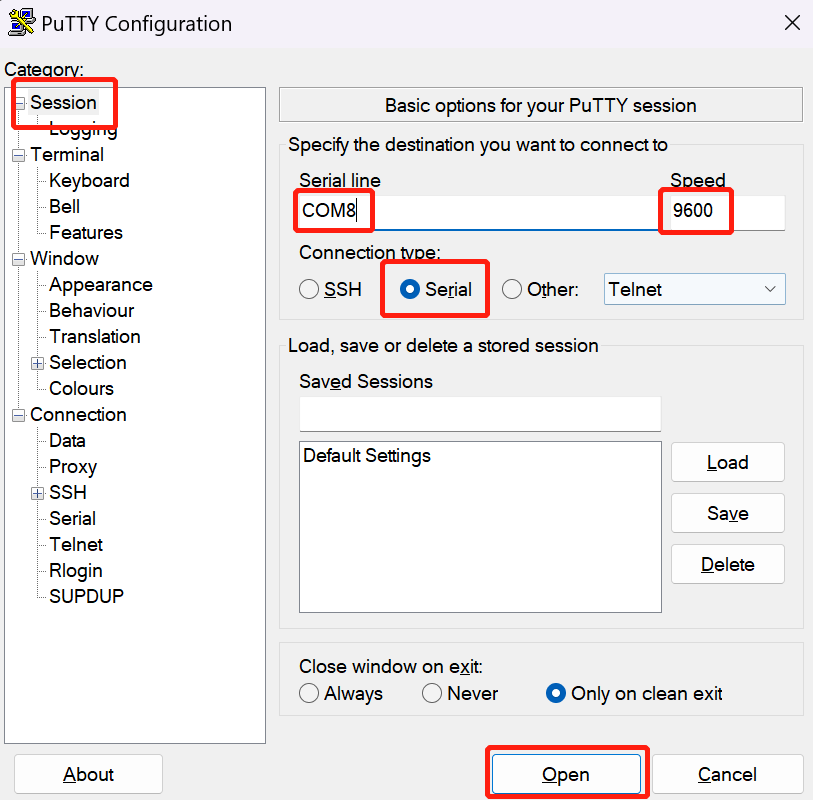
| 材料准备 | +描述 | +
|---|---|
 | Ubuntu主机x1. | +
 | 无系统的 reComputer Jetson x1 | +
 | UART转USB模块x1 | +
 | 母对母杜邦线 x3 | +
 |
+ ||
| reComputer | ++ | UART to USB module | +
| GND | +--> | +GND | +
| UART TXD | +--> | +RX | +
| UART RXD | +--> | +TX | +





















































| Component Group | +Packages | +|
|---|---|---|
| CUDA Toolkit for L4T | +cuda cuda-11-4 cuda-cccl-11-4 cuda-command-line-tools-11-4 cuda-compiler-11-4 cuda-cudart-11-4 cuda-cudart-dev-11-4 cuda-cuobjdump-11-4 cuda-cupti-11-4 cuda-cupti-dev-11-4 cuda-cuxxfilt-11-4 cuda-documentation-11-4 cuda-driver-dev-11-4 cuda-gdb-11-4 cuda-gdb-src-11-4 cuda-libraries-11-4 cuda-libraries-dev-11-4 cuda-minimal-build-11-4 cuda-nvcc-11-4 cuda-nvdisasm-11-4 cuda-nvml-dev-11-4 cuda-nvprof-11-4 cuda-nvprune-11-4 cuda-nvrtc-11-4 cuda-nvrtc-dev-11-4 cuda-nvtx-11-4 |
+ cuda-runtime-11-4 cuda-samples-11-4 cuda-sanitizer-11-4 cuda-toolkit-11-4 cuda-toolkit-11-4-config-common cuda-toolkit-11-config-common cuda-toolkit-config-common cuda-tools-11-4 cuda-visual-tools-11-4 libcublas-11-4 libcublas-dev-11-4 libcudla-11-4 libcudla-dev-11-4 libcufft-11-4 libcufft-dev-11-4 libcurand-11-4 libcurand-dev-11-4 libcusolver-11-4 libcusolver-dev-11-4 libcusparse-11-4 libcusparse-dev-11-4 libnpp-11-4 libnpp-dev-11-4 |
+
| cuDNN | +libcudnn8 libcudnn8-dev |
+ libcudnn8-samples | +
| TensorRT | +graphsurgeon-tf libnvinfer-bin libnvinfer-dev libnvinfer-doc libnvinfer-plugin-dev libnvinfer-plugin8 libnvinfer-samples libnvinfer8 |
+ libnvonnxparsers-dev libnvonnxparsers8 libnvparsers-dev libnvparsers8 python3-libnvinfer python3-libnvinfer-dev tensorrt uff-converter-tf |
+
| OpenCV | +libopencv libopencv-dev opencv-licenses |
+ libopencv-python libopencv-samples |
+
| VPI | +libnvvpi2 vpi2-dev python-vpi2 |
+ python3.9-vpi2 vpi2-samples vpi2-demos |
+
| NVIDIA container runtime with Docker integration | +libnvidia-container0 libnvidia-container1 libnvidia-container-tools |
+ nvidia-container-toolkit nvidia-container-runtime nvidia-docker2 |
+
| Multimedia API | +nvidia-l4t-jetson-multimedia-api | +
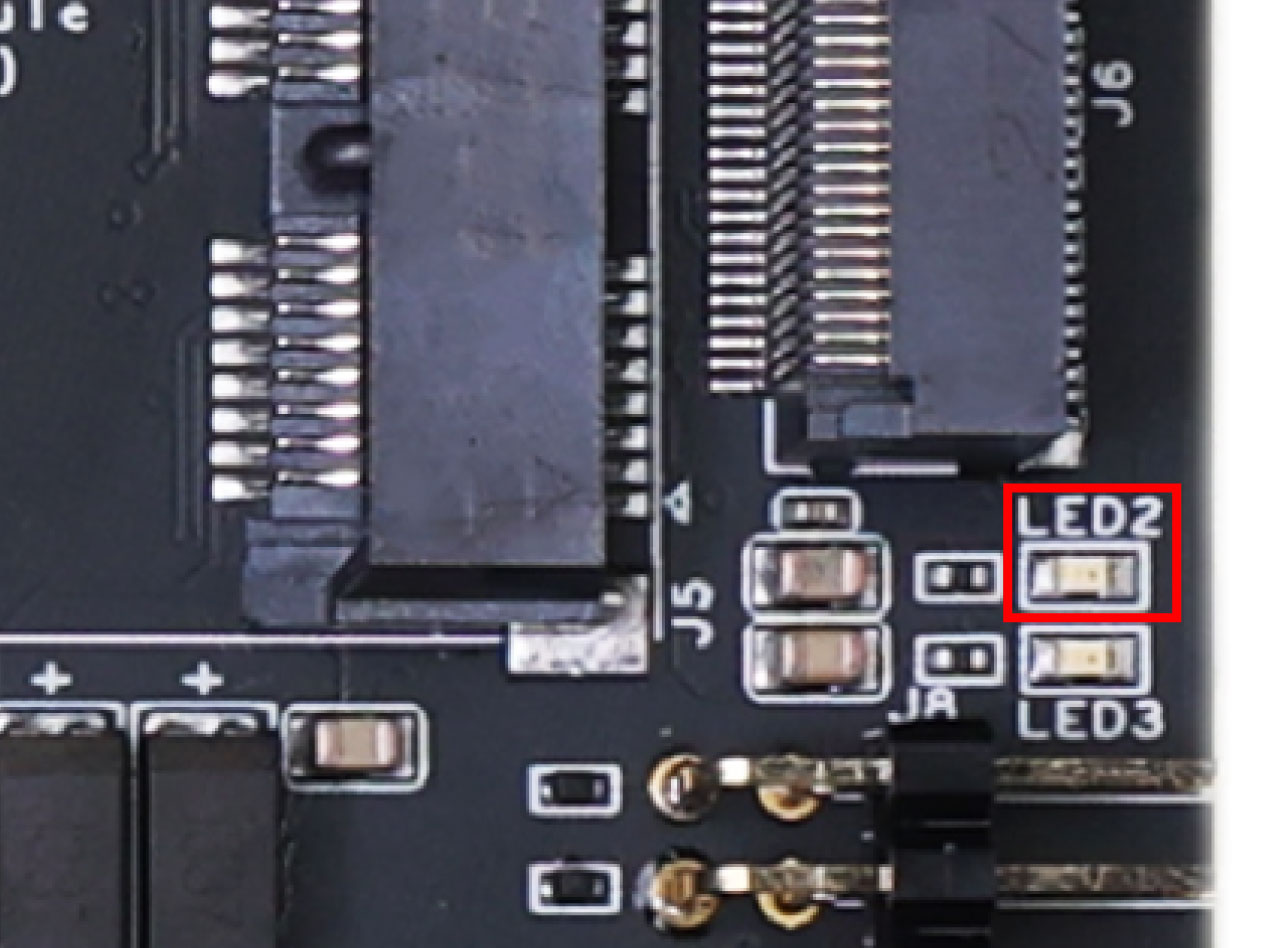
| + | Button Header | +Description | +Button Header | +Description | +
|---|---|---|---|---|
 |
+ 1 | +PWR BTN | +7 | +AUTO ON | +
| 2 | +GND | +8 | +DISABLE | +|
| 3 | +FC REC | +9 | +UART TXD | +|
| 4 | +GND | +10 | +UART RXD | +|
| 5 | +SYS RET | +11 | +LED + | +|
| 6 | +GND | +12 | +LED - | +





| 规格说明 | +reComputer J1010 | +reComputer J1020v2 | +NVIDIA Jetson Nano Developer Kit-B01 | +
|---|---|---|---|
| Module | +Jetson Nano 4GB (production version) | +Nano (not production version) | +|
| Storage | +16 GB eMMC | +MicroSD (Card not included) | +|
| SD Card Slot | +Included (On the carrier board) | +- | +Included (On the module) | +
| Video Encoder | +4K30 | 2x1080p60 | 4x1080p30 | 4x720p60 | 9x720p30 (H.265 & H.264) | +4Kp30 | 4x 1080p30 | 9x 720p30 (H.264/H.265) | +|
| Video Decoder | +4K60 | 2x 4K30 | 4x 1080p60 | 8x 1080p30 | 9x 720p60 (H.265 & H.264) + | +4Kp60 | 2x 4Kp30 | 8x 1080p30 | 18x 720p30 (H.264/H.265) | +|
| Gigabit Ethernet | +1*RJ45 Gigabit Ethernet Connector (10/100/1000) | +||
| USB | +1 * USB 3.0 Type A; +2 * USB 2.0 Type A; +1 * USB Type C for device mode; +1 * USB Type C for 5V power input | +4 * USB 3.0 Type-A ; +1 * Micro-USB port for device mode; | +4 * USB 3.0 Type-A; +1 * Micro-USB port for 5V power input or for device mode | +
| CSI Camera Connect | +2*CSI Camera (15 pos, 1mm pitch, MIPI CSI-2 ) | +||
| Display | +1*HDMI Type A | +1*HDMI Type A; +1*DP | +|
| FAN | +1* FAN connetcor (5V PWM) | +||
| M.2 KEY E | +1*M.2 Key E | +1*M.2 Key E (Disabled) | +1*M.2 Key E | +
| M.2 KEY M | +- | +1*M.2 Key M | +- | +
| RTC | +1*RTC Socket | +1*RTC Socket +1*RTC 2-pin | +- | +
| Multifunctional port | +1* 40-Pin header | +||
| Power Supply | +USB-Type C 5V⎓3A | ++9-12V Power adapter not included(Barrel Jack 5.5/2.5mm) | +DC Jack 5V⎓4A; +Micro-USB 5V⎓2A | +
| Mechanical | +130 mm x 120 mm x 50 mm (with case) | +100 mm x 80 mm x 29 mm | +|
| | | |
+| Equipped Module | Jetson Nano 4GB | Jetson Nano 4GB | Jetson Xavier NX 8GB | Jetson Xavier NX 16GB |
+| Operating carrier Board | J1010 Carrier Board | Jetson A206 | Jetson A206 |Jetson A206 |
+| Power Interface | Type-C connector | DC power adapter | DC power adapter | DC power adapter |
+|Link | | | | |
+
+## 接口详情。
+
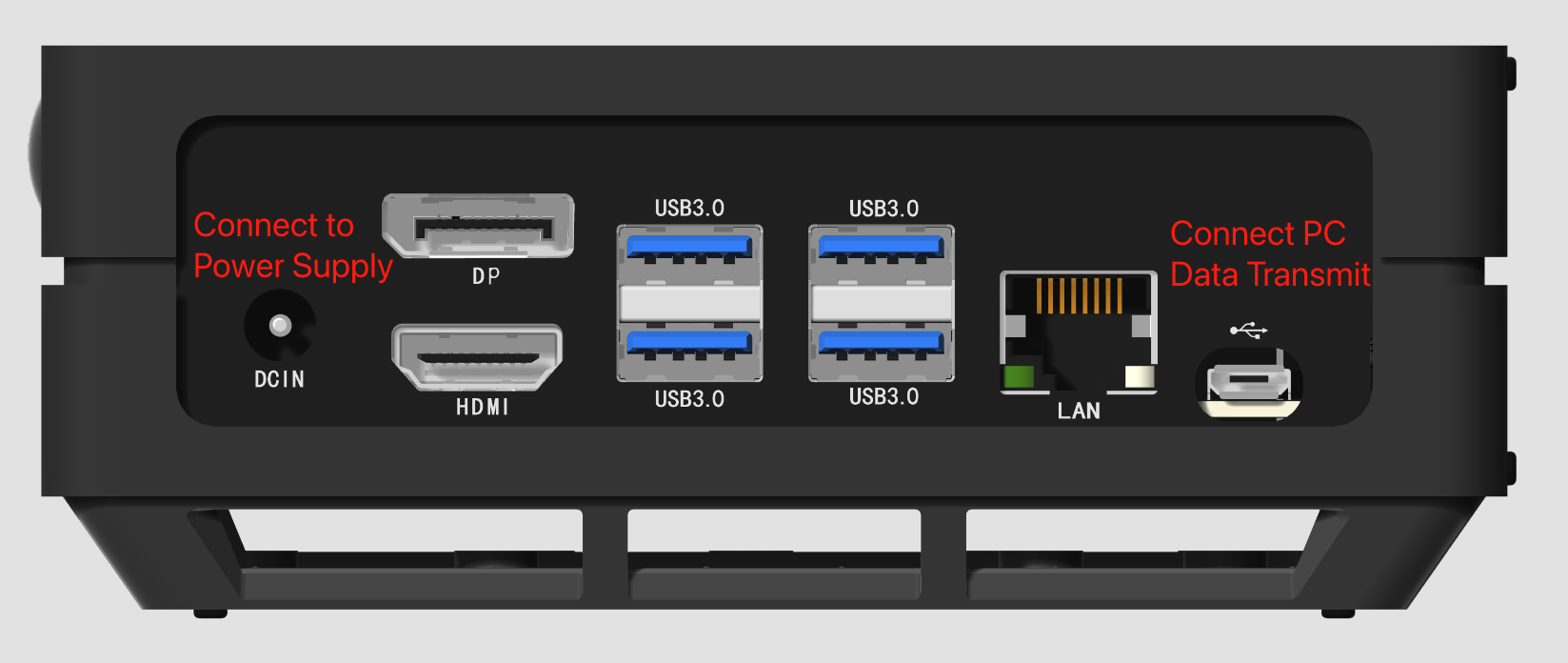
+当前的4款reComputer产品外观相同,区别在于背部接口。[reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html)使用一种接口组合,其他三款使用另一种接口组合,因为底盘上使用了两个不同的载板。
+
+
+### J1010 载板
+
+这个载板适用于[reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html)。
+
+
| | | |
+
+## 接口详情。
+
+当前的4款reComputer产品外观相同,区别在于背部接口。[reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html)使用一种接口组合,其他三款使用另一种接口组合,因为底盘上使用了两个不同的载板。
+
+
+### J1010 载板
+
+这个载板适用于[reComputer J1010](https://www.seeedstudio.com/Jetson-10-1-A0-p-5336.html)。
+
+






+

+


| 规格要求 | +reComputer J3010 | +reComputer J3011 | +reComputer J4011 | +reComputer J4012 | +
|---|---|---|---|---|
| Module | +Jetson Orin Nano 4GB | +Jetson Orin Nano 8GB | +Jetson Orin NX 8GB | +Jetson Orin NX 16GB | +
| AI Performance | +20 TOPS | +40 TOPS | +70 TOPS | +100 TOPS | +
| GPU | +512-core NVIDIA Ampere architecture GPU with 16 Tensor Cores | +1024-core NVIDIA Ampere architecture GPU with 32 Tensor Cores | +1024-core NVIDIA Ampere architecture GPU with 32 Tensor Cores | +|
| GPU Max Frequency | +625 MHz | +765 MHz | +918 MHz | +|
| CPU | +6-core Arm® Cortex®-A78AE v8.2 64-bit CPU 1.5MB L2 + 4MB L3 |
+ 6-core Arm® Cortex®-A78AE v8.2 64-bit CPU 1.5MB L2 + 4MB L3 | +8-core Arm® Cortex®-A78AE v8.2 64-bit CPU 2MB L2 + 4MB L3 | +|
| CPU Max Frequency | +1.5 GHz | +2 GHz | +||
| Memory | +4GB 64-bit LPDDR5 34 GB/s |
+ 8GB 128-bit LPDDR5 68 GB/s |
+ 8GB 128-bit LPDDR5 102.4GB/s | +16GB 128-bit LPDDR5 102.4GB/s | +
| DL Accelerator | +/ | +1x NVDLA v2 | +2x NVDLA v2 | +|
| DLA Max Frequency | +/ | +614 MHz | +||
| Vision Accelerator | +/ | +1x PVA v2 | +||
| Storage | +128GB NVMe SSD | +|||
| Video Encoder | +1080p30 supported by 1-2 CPU cores | +1x 4K60 (H.265) | 3x 4K30 (H.265) 6x 1080p60 (H.265) | 12x 1080p30 (H.265) |
+ ||
| Video Decoder | +1x 4K60 (H.265) 2x 4K30 (H.265) 5x 1080p60 (H.265) 11x 1080p30 (H.265) |
+ 1x 8K30 (H.265) | 2x 4K60 (H.265) | 4x 4K30 (H.265) 9x 1080p60 (H.265) | 18x 1080p30 (H.265) |
+ ||
| Display | +1* HDMI 2.1 | +|||
| CSI Camera | +2* CSI (2-lane 15pin) | +|||
| Networking | +1* Gigabit Ethernet (10/100/1000M) | +|||
| USB | +4* USB 3.2 Type-A (10Gbps); 1* USB2.0 Type-C (Device Mode) | +|||
| M.2 Key M | +1* M.2 Key M | +|||
| M.2 Key E | +1* M.2 Key E | +|||
| Fan | +1* 4 pin Fan Connector(5V PWM) | +|||
| CAN | +1* CAN | +|||
| Multifunctional Port | +1* 40-Pin Expansion header,1* 12-Pin Control and UART header | +|||
| RTC | +RTC 2-pin, RTC socket (supports CR1220 but not included) | +|||
| Power | +9-19V | +|||
| Power Supply | +Power adapter not included | +|||
| Temperature | +-10℃~60℃ | +|||
| Mechanical | +130mm x120mm x 58.5mm | +|||