![]()




 |
+ ||
| 雷达传感器 | ++ | 主板 | +
| 5V | +--> | +5V | +
| GND | +--> | +GND | +
| RX | +--> | +D6 | +
| TX | +--> | +D7 | +






 |
+ ||
| 雷达传感器 | ++ | 主板 | +
| 5V | +--> | +5V | +
| GND | +--> | +GND | +
| RX | +--> | +TX | +
| TX | +--> | +RX | +


![]()
 |
+ ||
| 雷达传感器 | ++ | 主板 | +
| 5V | +--> | +5V | +
| GND | +--> | +GND | +
| RX | +--> | +D6 | +
| TX | +--> | +D7 | +
|
+ ||
| Radar Sensor | ++ | Main Board | +
| 5V | +--> | +5V | +
| GND | +--> | +GND | +
| RX | +--> | +TX | +
| TX | +--> | +RX | +
![]()
|
+ ||
| 雷达传感器 | ++ | 主板 | +
| 5V | +--> | +5V | +
| GND | +--> | +GND | +
| RX | +--> | +D6 | +
| TX | +--> | +D7 | +
|
+ ||
| 雷达传感器 | ++ | 主板 | +
| 5V | +--> | +5V | +
| GND | +--> | +GND | +
| RX | +--> | +TX | +
| TX | +--> | +RX | +
 |
+ ||
| 雷达传感器 | ++ | UART转USB | +
| 5V | +--> | +5V | +
| GND | +--> | +GND | +
| RX | +--> | +TX | +
| TX | +--> | +RX | +
![]()
 |
+ ||
| MR24HPC1 | ++ | 主板 | +
| 5V | +--> | +5V | +
| GND | +--> | +GND | +
| RX | +--> | +D6 | +
| TX | +--> | +D7 | +
| MR24HPC1 | ++ | MCU | +
| 5V | +--> | +5V | +
| GND | +--> | +GND | +
| RX | +--> | +软件串行端口 TX(发送) | +
| TX | +--> | +软件串行端口 RX(接收) | +
|
+ ||
| 雷达传感器 | ++ | UART 到 USB | +
| 5V | +--> | +5V | +
| GND | +--> | +GND | +
| RX | +--> | +TX | +
| TX | +--> | +RX | +

|
+ |||
| UART 到 USB | ++ | MR60BHA1 传感器 | +|
| 5V | +--> | +5V | +|
| GND | +--> | +GND | +|
| RX | +--> | +TX | +|
| TX | +--> | +RX | +|
![]()
 |
+ ||
| 矽力特(Seeed Studio)XIAO nRF52840 开发板 | ++ | MR60BHA1 传感器 | +
| 5V | +--> | +5V | +
| GND | +--> | +GND | +
| RX | +--> | +D6 | +
| TX | +--> | +D7 | +
| MR60BHA1 传感器 | ++ | MCU | +
| 5V | +--> | +5V | +
| GND | +--> | +GND | +
| RX | +--> | +软件串行端口接收(TR) | +
| TX | +--> | +软件串行端口发送(TX) | +
|
+ |||
| UART 到 USB | ++ | MR60BHA1 传感器 | +|
| 5V | +--> | +5V | +|
| GND | +--> | +GND | +|
| RX | +--> | +TX | +|
| TX | +--> | +RX | +|
|
+ |||
| UART 到 USB | ++ | MR60FDA1 传感器 | +|
| 5V | +--> | +5V | +|
| GND | +--> | +GND | +|
| RX | +--> | +TX | +|
| TX | +--> | +RX | +|
![]()
|
+ |||
| Seeed Studio XIAO nRF52840 | ++ | MR60FDA1 传感器 | +|
| 5V | +--> | +5V | +|
| GND | +--> | +GND | +|
| RX | +--> | +D6 | +|
| TX | +--> | +D7 | +|
| MR60FDA1 传感器 | ++ | MCU | +
| 5V | +--> | +5V | +
| GND | +--> | +GND | +
| RX | +--> | +soft serial port TX | +
| TX | +--> | +soft serial port RX | +
|
+ |||
| UART 到 USB | ++ | MR60FDA1 传感器 | +|
| 5V | +--> | +5V | +|
| GND | +--> | +GND | +|
| RX | +--> | +TX | +|
| TX | +--> | +RX | +|

| Seeed Studio XIAO ESP32C3 | +24GHz mmWave for XIAO | +
|---|---|
 |
+  |
+
+
+ 点击购买 🖱️
+
+ |
+
+
+ 点击购买 🖱️
+
+ |
+









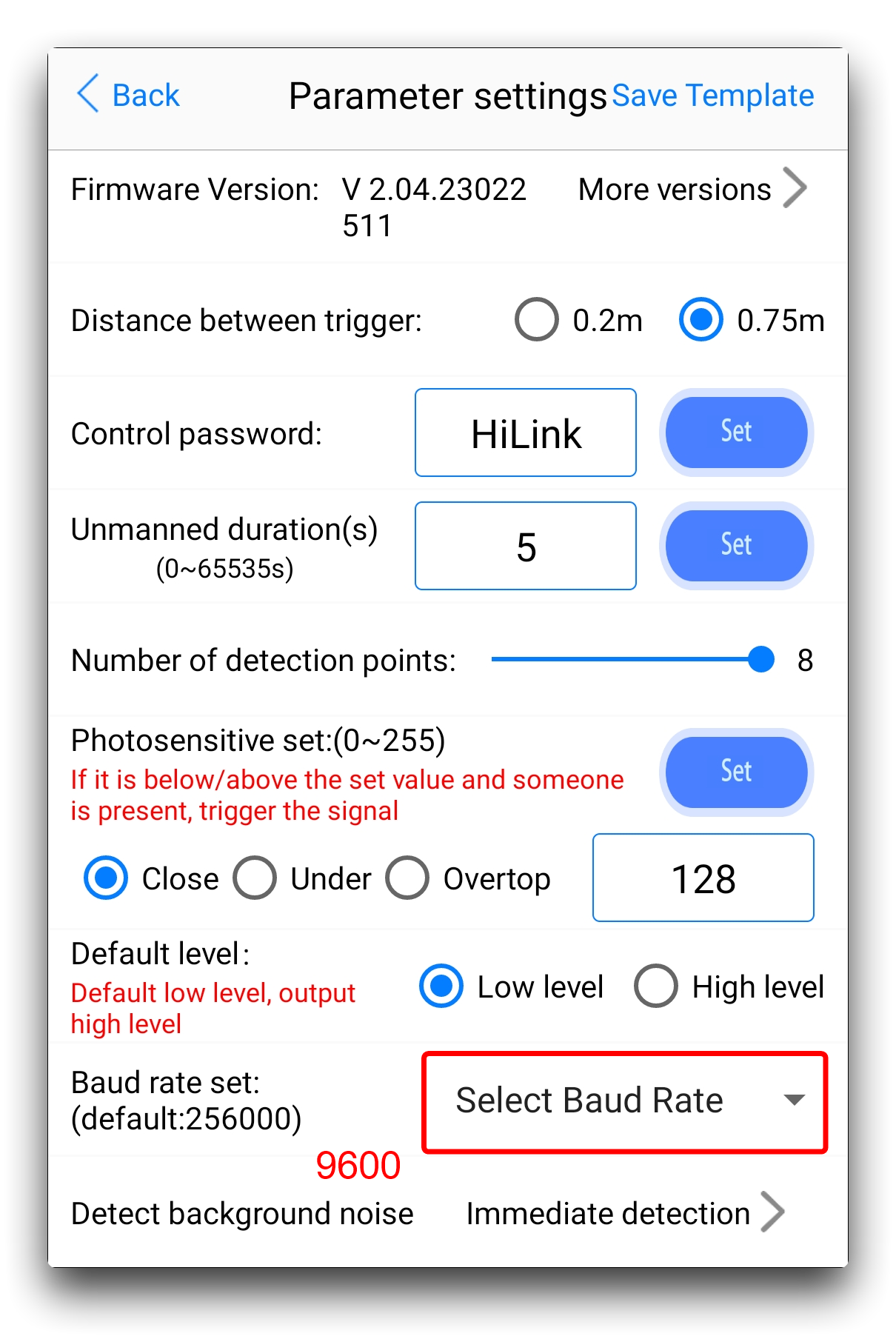
| 参数 | +数值 | +
|---|---|
| 工作频率 | +24GHz ~ 24.25GHz | +
| 工作电压 | +DC 5V | +
| 平均工作电流 | +>200mA | +
| 调制方式 | +79mA | +
| 接口 | +FMCW | +
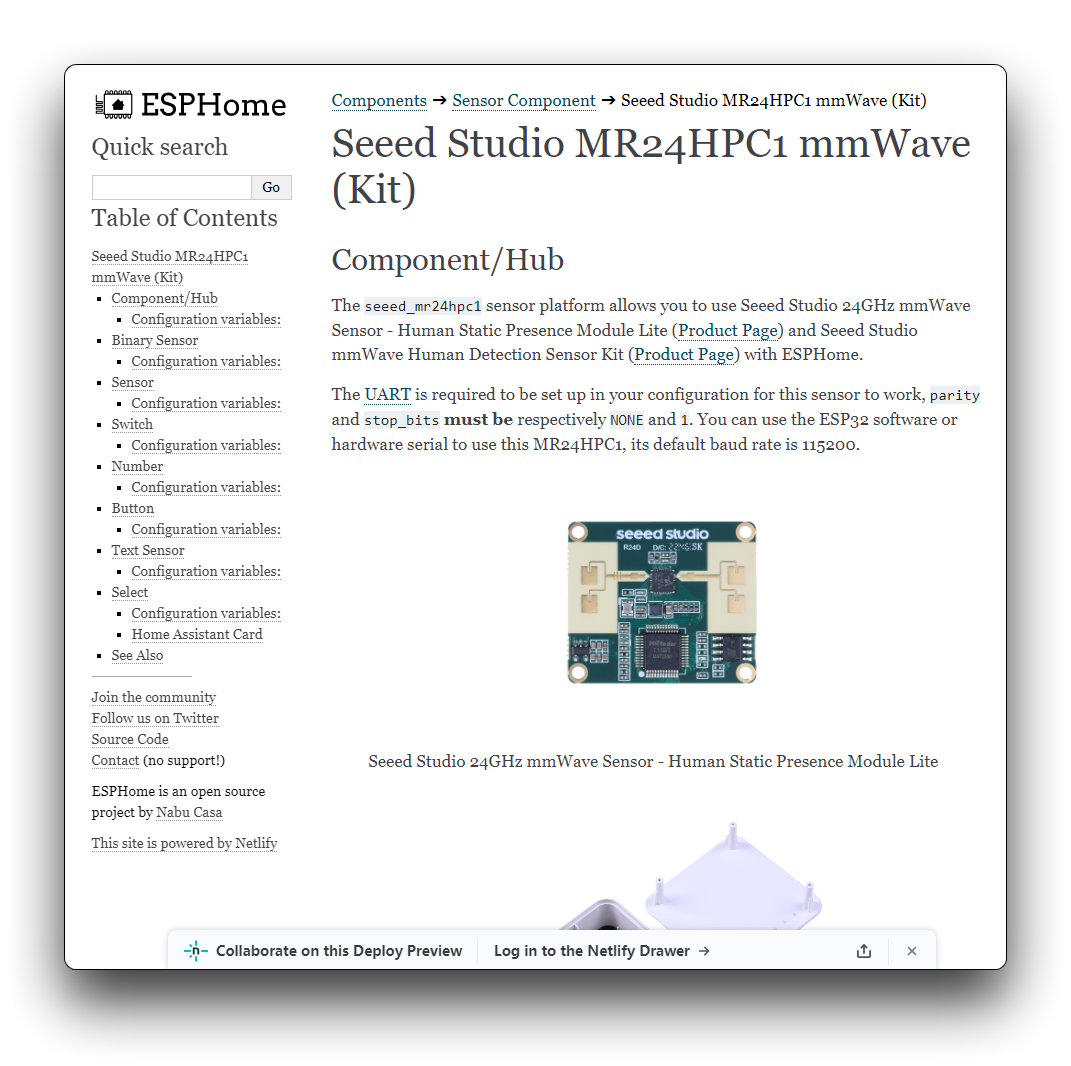
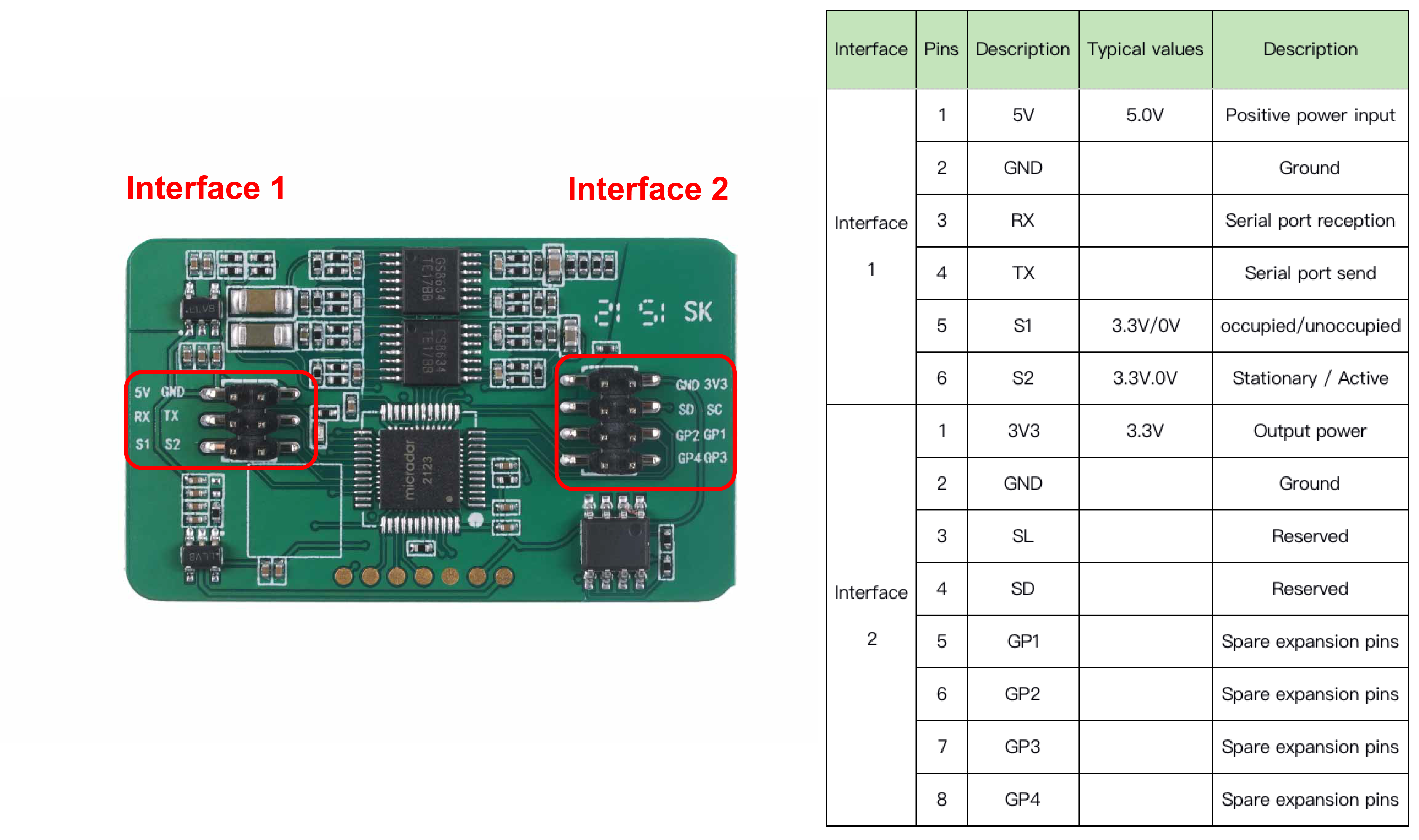
| Interface | +GPIO (IO 电平 3.3V), UART | +
| 目标应用 | +人体存在传感器 | +
| 检测距离 | +0.75m ~ 6m (可调) | +
| 检测角度 | +±60° | +
| 距离分辨率 | +0.75m | +
| 扫描带宽 | +250MHz | +
| 环境温度 | +-40℃ ~ 85℃ | +
| 尺寸 | +17.5mm x 21mm | +

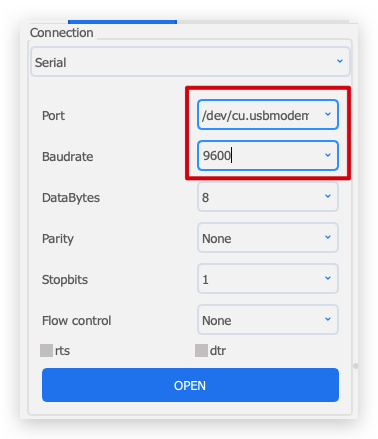
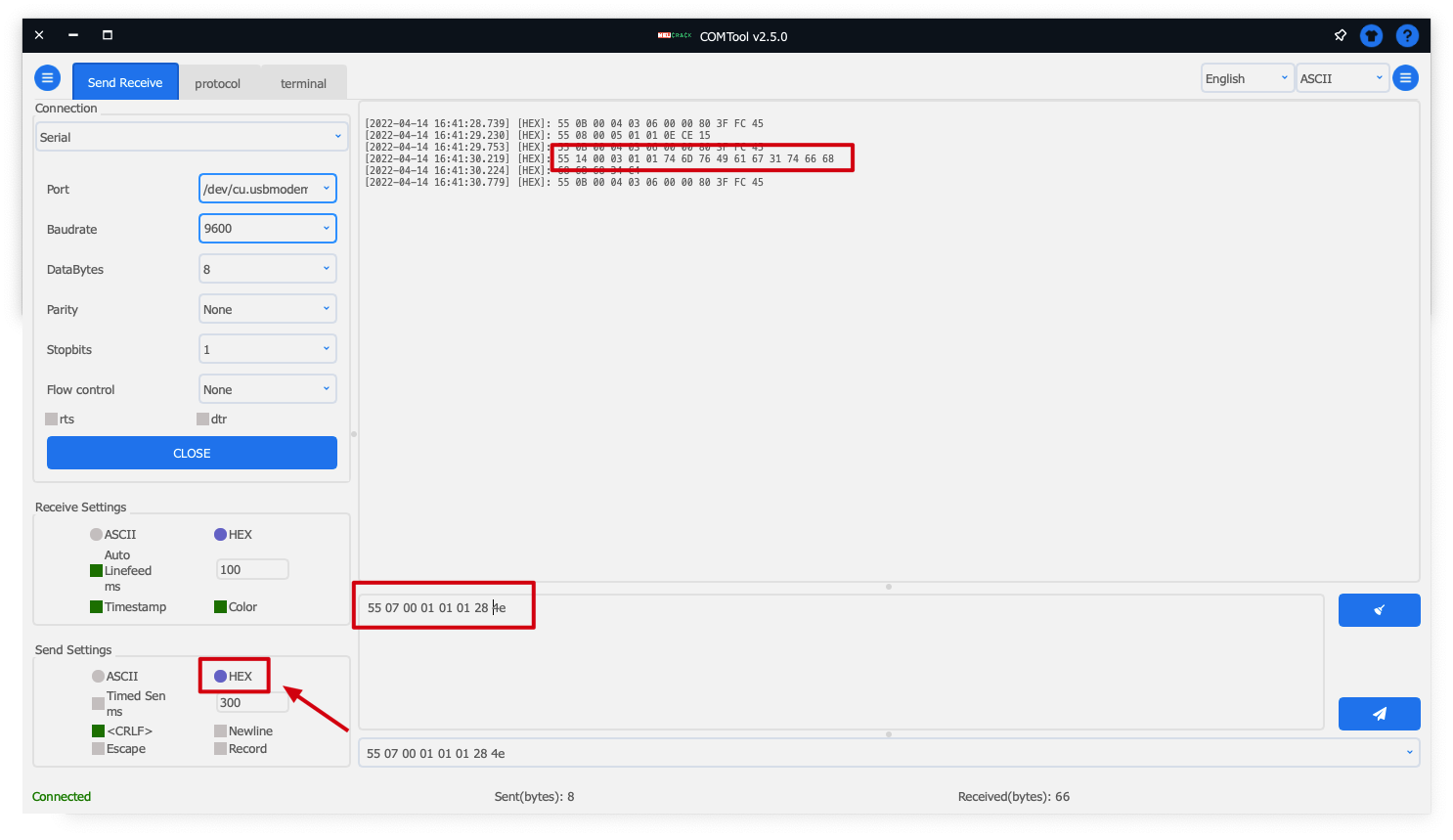
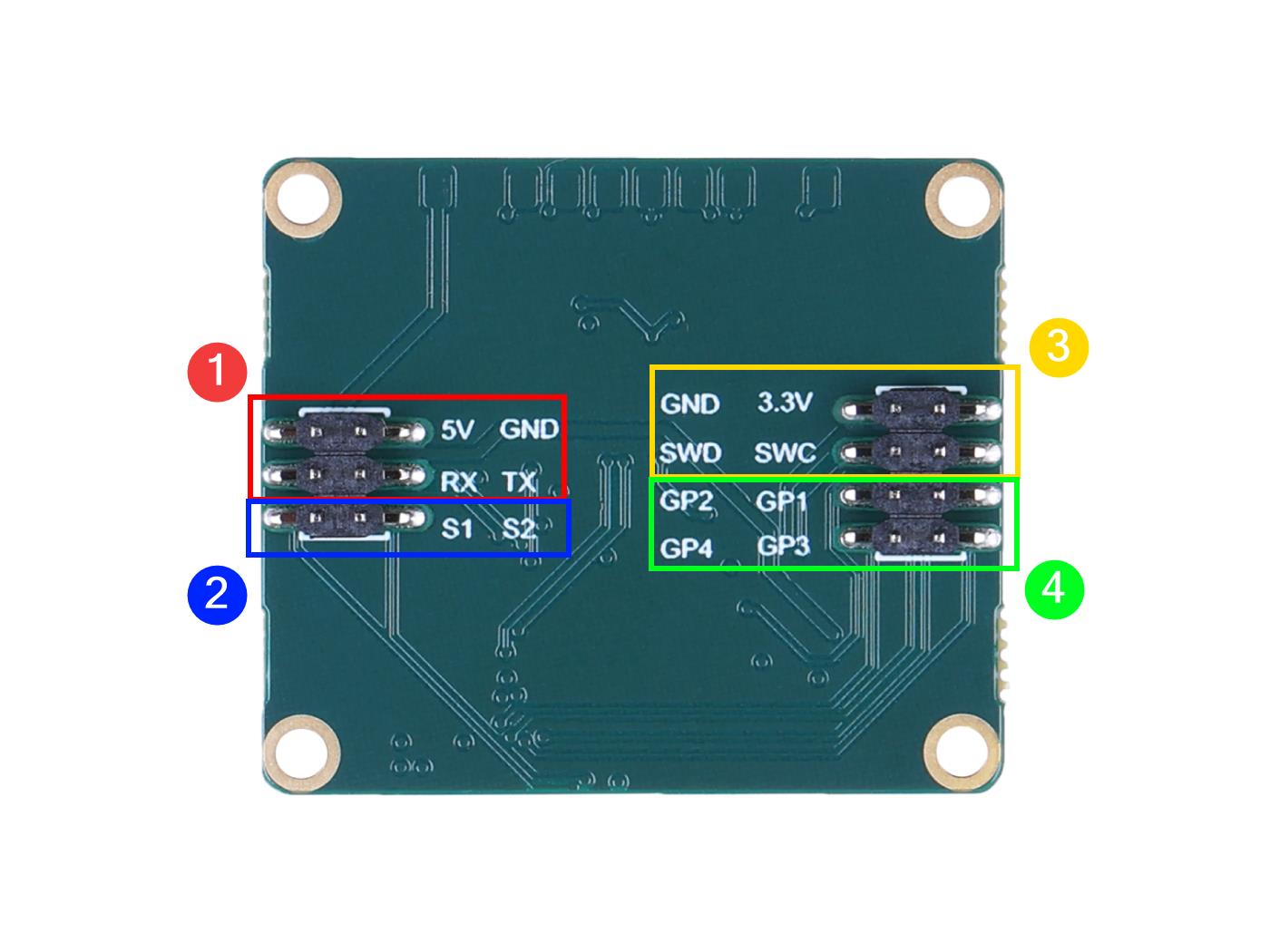
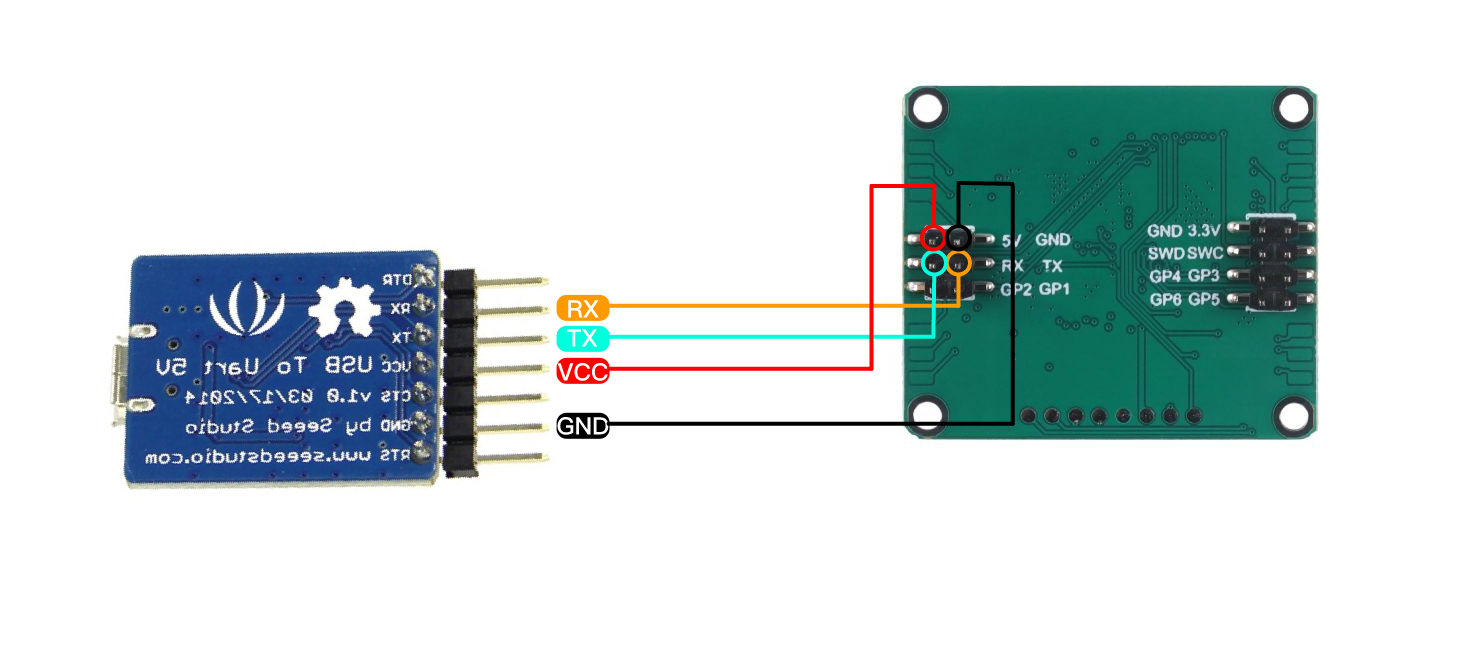
| + | USB to serial port tool | +mmWave Sensor | +
|---|---|---|
 |
+ 3V3 | +3V3 | +
| GND | +GND | +|
| RX | +TX | +|
| TX | +RX | +
| Seeed Studio XIAO SAMD21 | +Seeed Studio XIAO RP2040 | +Seeed Studio XIAO nRF52840 (Sense) | +Seeed Studio XIAO ESP32C3 | +Seeed Studio XIAO ESP32S3 | +
|---|---|---|---|---|
 |
+  |
+  |
+ |
+  |
+
+
+ 立即购买 🖱️
+
+ |
+
+
+ 立即购买 🖱️
+
+ |
+
+
+ 立即购买 🖱️
+
+ |
+
+
+ 立即购买 🖱️
+
+ |
+
+
+ 立即购买 🖱️
+
+ |
+
| Seeed Studio XIAO ESP32C3 | +24GHz mmWave for XIAO | +
|---|---|
|
+ |
+
+
+ 立即购买 🖱️
+
+ |
+
+
+ 立即购买 🖱️
+
+ |
+
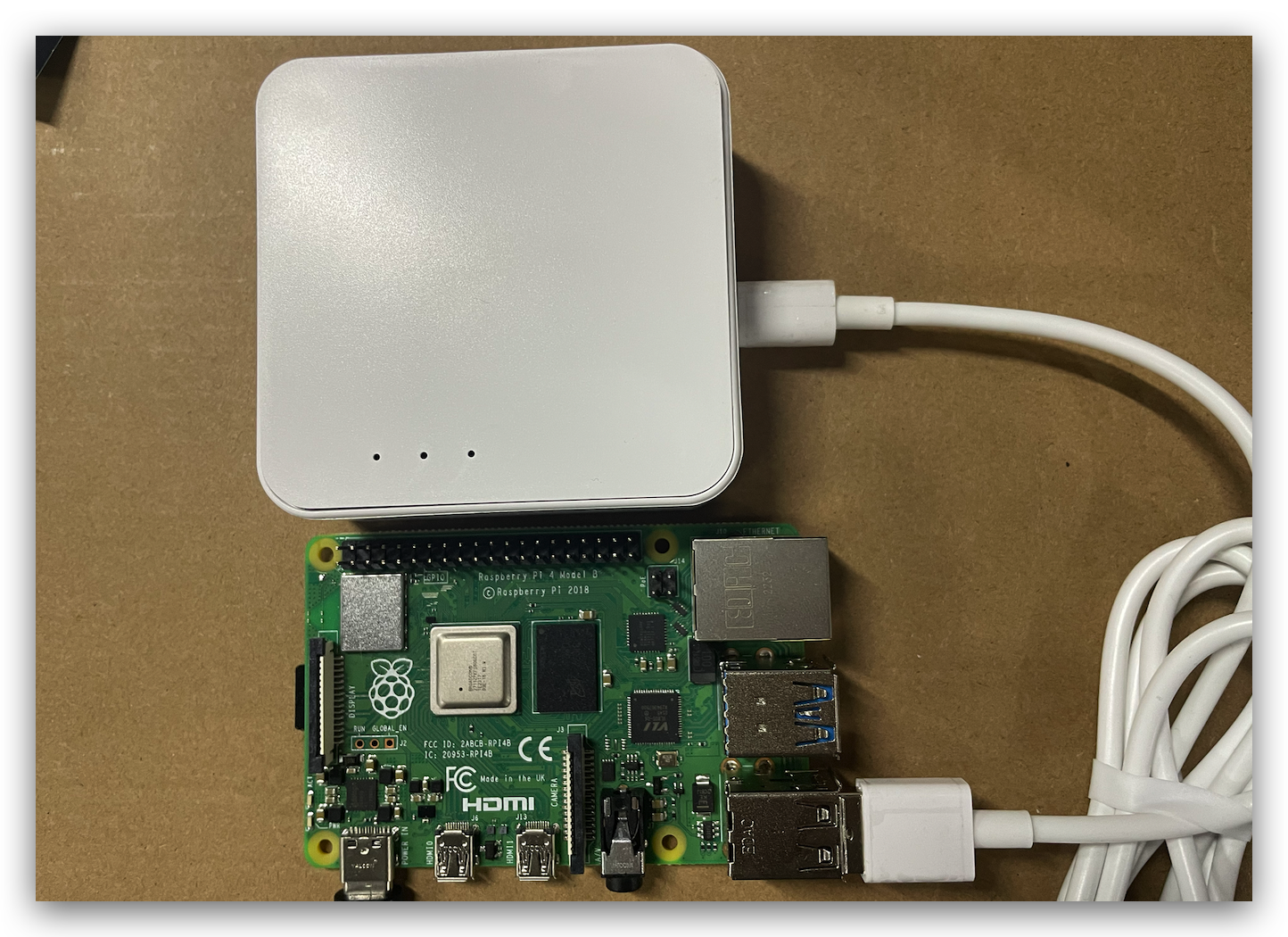
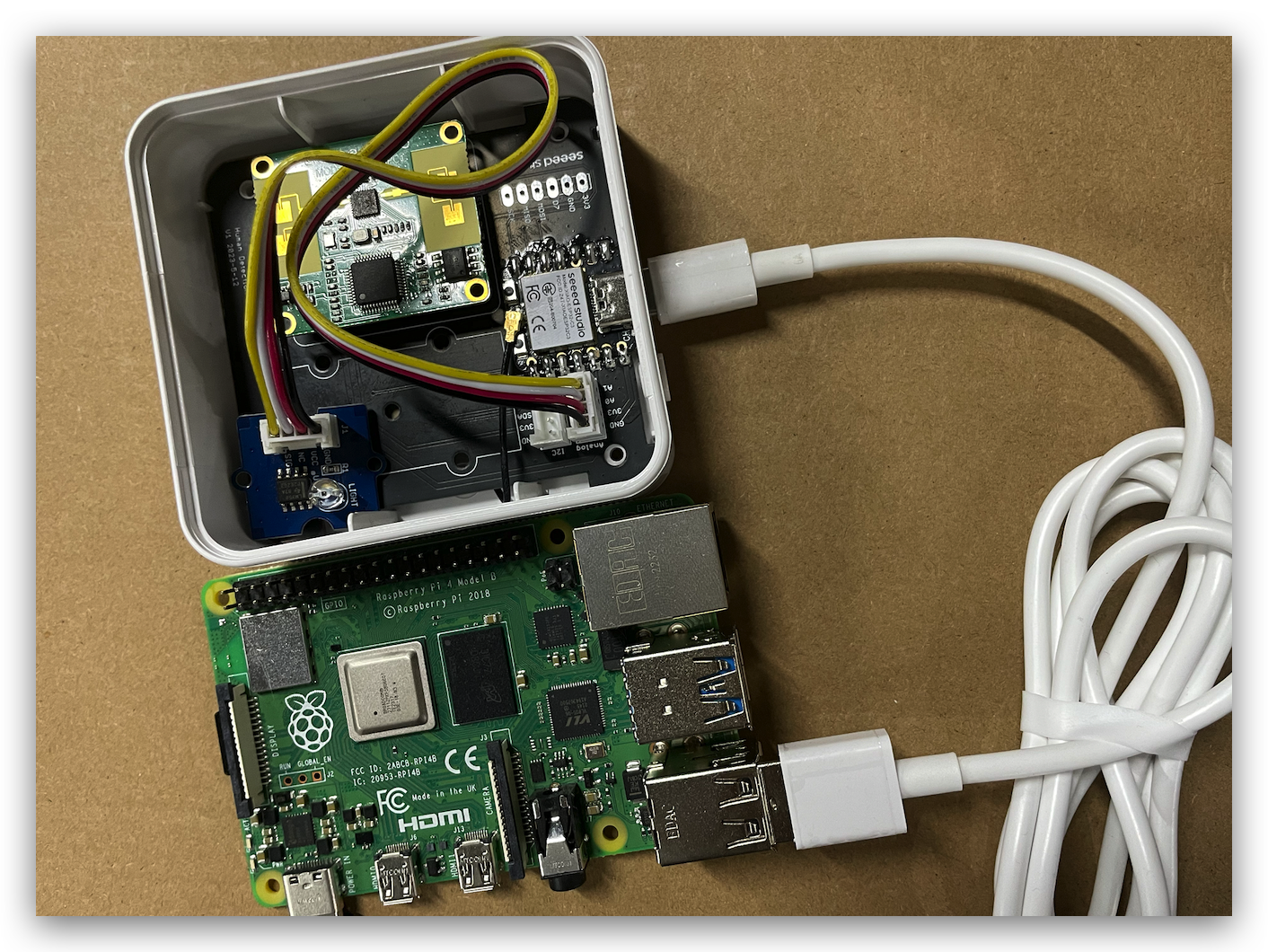
| 毫米波人体检测传感器套件 | +Raspberry Pi 4B | +
|---|---|
 |
+  |
+
+
+ 立即购买 🖱️
+
+ |
+
+
+ 立即购买🖱️
+
+ |
+
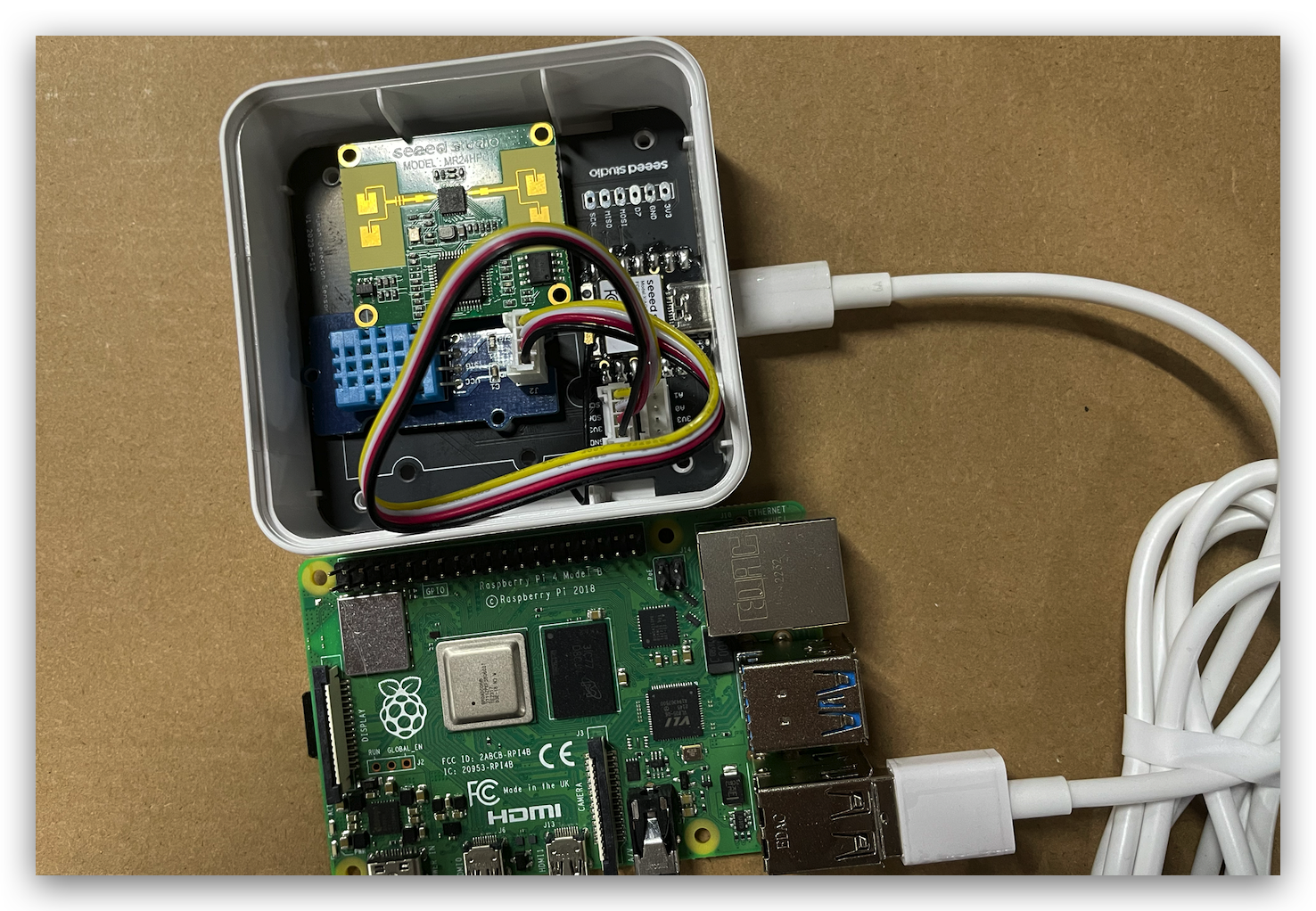
| XIAO ESP32C3 | +MR24HPC1 | +
|---|---|
| 5V | +VCC | +
| GND | +GND | +
| GPIO4 (D2) | +RX | +
| GPIO5 (D3) | +TX | +