You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
Blaze 101 camera produces low FPS (about 7 to 9) when frame rate is set much higher to 20. This was checked using rqt_topic while the images where displayed on rqt_image_view:
The other issues related to low FPS on this repository seem to not apply to Blaze. However, I found that if I call the service /my_blaze/pylon_ros2_camera_node/set_trigger_mode with False and then again with True, the frame rate issue is fixed and I now get the full 20 FPS:
The service calls were performed using rqt_service_caller.
Not sure why happens and if there a way to change a parameter that would get me full 20 FPS right from the start. For now, I perform these service calls after camera startup to bypass this issue.
Code example about how to reproduce the issue
Launch ros2 launch pylon_ros2_camera_wrapper my_blaze.launch.py
Subscribe to image topic within rqt_image_view.
View frame rate using rqt_topic
Error message
No response
Hardware setup description
Ubuntu 22.04 running on WSL2 in Windows 11
Camera connected directly to host comupter
Pylon 7.5.0
Supplementary Package for Blaze 1.6.0
Blaze firmware 5.1.0
Runtime information
Launch configuration `my_blaze.yaml`
/**:
ros__parameters:
# The tf frame under which the images were published
camera_frame: pylon_camera
# The DeviceUserID of the camera. If empty, the first camera found in the# device list will be used
device_user_id: blaze_balto
enable_current_params_publisher: true# This does not have an effect to FPS for Blaze# The desired publisher frame rate if listening to the topics.# This parameter can only be set once at startup# Calling the GrabImages-Action can result in a higher framerate
frame_rate: 20.0
################################################################################################## Image Intensity Settings ################################################################################################### The following settings do *NOT* have to be set. Each camera has default# values which provide an automatic image adjustment resulting in valid# images########################################################################### The exposure time in microseconds to be set after opening the camera.
exposure: 250.0
########################################################################### Grab timeout
grab_timeout: 1000
Is your camera operational with the Basler pylon Viewer on your platform?
Yes
The text was updated successfully, but these errors were encountered:
Issue description
Blaze 101 camera produces low FPS (about 7 to 9) when frame rate is set much higher to 20. This was checked using
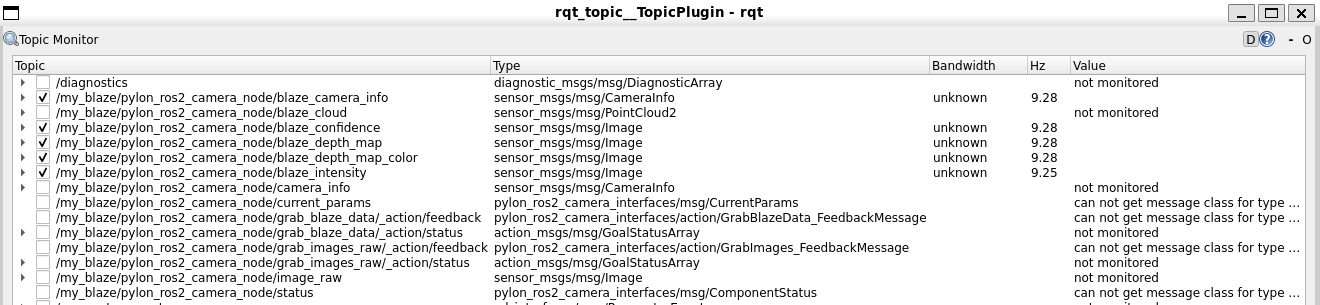
rqt_topicwhile the images where displayed onrqt_image_view:The other issues related to low FPS on this repository seem to not apply to Blaze. However, I found that if I call the service
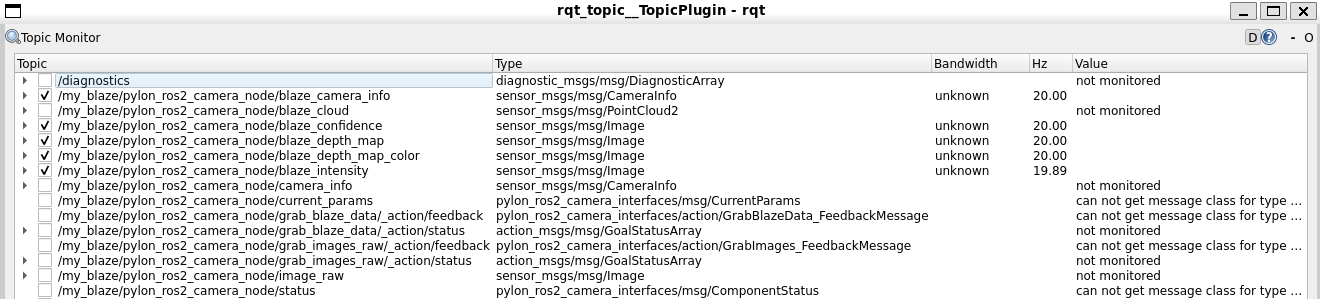
/my_blaze/pylon_ros2_camera_node/set_trigger_modewithFalseand then again withTrue, the frame rate issue is fixed and I now get the full 20 FPS:The service calls were performed using
rqt_service_caller.Not sure why happens and if there a way to change a parameter that would get me full 20 FPS right from the start. For now, I perform these service calls after camera startup to bypass this issue.
Code example about how to reproduce the issue
Launch
ros2 launch pylon_ros2_camera_wrapper my_blaze.launch.pySubscribe to image topic within
rqt_image_view.View frame rate using
rqt_topicError message
No response
Hardware setup description
Ubuntu 22.04 running on WSL2 in Windows 11
Camera connected directly to host comupter
Pylon 7.5.0
Supplementary Package for Blaze 1.6.0
Blaze firmware 5.1.0
Runtime information
Is your camera operational with the Basler pylon Viewer on your platform?
Yes
The text was updated successfully, but these errors were encountered: