This project aims to develop a fully functional mission module that can be mounted on a virtual unmanned ground vehicle for simulating ISR missions. The module mimicks functionalities of a real life mission module and supports a variety of sensors, actuators and features which can be remotely controlled by a command and control application. Sensors/actuators currently available include
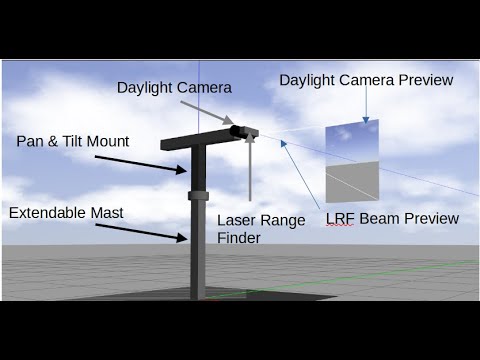
- Extendable mast
- Electro Optic camera with RTSP feed of the simulated virtual environment
- Laser Range Finder (LRF)
Checkout the demo video at youtube by clicking on the following image
Ensure following exists on your environment, this project was developed using Ubuntu 20.04 LTS
| Dependency | Notes |
|---|---|
| Ros Version | Noetic (http://wiki.ros.org/noetic/Installation/Ubuntu) |
| Gazebo | http://gazebosim.org/tutorials?tut=install_ubuntu |
| GStreamer | sudo apt install gstreamer1.0-plugins-base gstreamer1.0-plugins-base-apps gstreamer1.0-plugins-good gstreamer1.0-tools gstreamer1.0-plugins-bad gstreamer1.0-plugins-rtp gstreamer1.0-plugins-ugly gstreamer1.0-rtsp gstreamer1.0-qt5 libgstrtspserver-1.0-0 libgstrtspserver-1.0-dev gstreamer1.0-libav |
Assuming you already have ros and gazebo setup, begin by cloning this repository into a new directory
Setup workspace
mkdir -p surv/src && cd surv
catkin_make
source devel/setup.bashInstall dependencies
pip3 install stanag4586edav1
pip3 install stanag4586vsmCheckout project and build
cd src
git clone https://github.com/faisalthaheem/surveillance-simulator
pushd
catkin_make
popd
./run-gazebo.shOn first run it will take some time for the models to be downloaded from internet, subsequent runs should be faster.
To configure the RTSP streaming, you must set the machine's reachable ip address in the file launch/gazebo.launch - look for the following code block and update
<env name="EXTERNAL_RTSP_IP_ADDRESS" value="10.10.20.102" />