有一个具有 n 个顶点的 双向 图,其中每个顶点标记从 0 到 n - 1(包含 0 和 n - 1)。图中的边用一个二维整数数组 edges 表示,其中 edges[i] = [ui, vi] 表示顶点 ui 和顶点 vi 之间的双向边。 每个顶点对由 最多一条 边连接,并且没有顶点存在与自身相连的边。
请你确定是否存在从顶点 source 开始,到顶点 destination 结束的 有效路径 。
给你数组 edges 和整数 n、source 和 destination,如果从 source 到 destination 存在 有效路径 ,则返回 true,否则返回 false 。
示例 1:
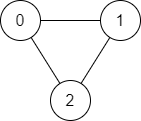
输入:n = 3, edges = [[0,1],[1,2],[2,0]], source = 0, destination = 2 输出:true 解释:存在由顶点 0 到顶点 2 的路径: - 0 → 1 → 2 - 0 → 2
示例 2:
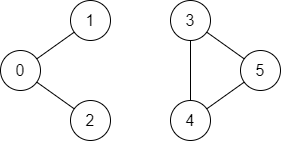
输入:n = 6, edges = [[0,1],[0,2],[3,5],[5,4],[4,3]], source = 0, destination = 5 输出:false 解释:不存在由顶点 0 到顶点 5 的路径.
提示:
1 <= n <= 2 * 1050 <= edges.length <= 2 * 105edges[i].length == 20 <= ui, vi <= n - 1ui != vi0 <= source, destination <= n - 1- 不存在重复边
- 不存在指向顶点自身的边
方法一:DFS
我们先将 edges 转换成邻接表 source 到 destination 的路径。
过程中,我们用数组 vis 记录已经访问过的顶点,避免重复访问。
时间复杂度
方法二:并查集
判断图中两个节点是否连通,一种比较简单直接的方法是使用并查集。
先构建并查集,然后将每条边的两个节点合并。
最后查询 source 和 destination 的祖宗节点是否相同,相同则说明两个节点连通。
时间复杂度
附并查集相关介绍以及常用模板:
并查集是一种树形的数据结构,顾名思义,它用于处理一些不交集的合并及查询问题。 它支持两种操作:
- 查找(Find):确定某个元素处于哪个子集,单次操作时间复杂度
$O(\alpha(n))$ - 合并(Union):将两个子集合并成一个集合,单次操作时间复杂度
$O(\alpha(n))$
其中
以下是并查集的常用模板,需要熟练掌握。其中:
-
n表示节点数 -
p存储每个点的父节点,初始时每个点的父节点都是自己 -
size只有当节点是祖宗节点时才有意义,表示祖宗节点所在集合中,点的数量 -
find(x)函数用于查找$x$ 所在集合的祖宗节点 -
union(a, b)函数用于合并$a$ 和$b$ 所在的集合
p = list(range(n))
size = [1] * n
def find(x):
if p[x] != x:
# 路径压缩
p[x] = find(p[x])
return p[x]
def union(a, b):
pa, pb = find(a), find(b)
if pa == pb:
return
p[pa] = pb
size[pb] += size[pa]int[] p = new int[n];
int[] size = new int[n];
for (int i = 0; i < n; ++i) {
p[i] = i;
size[i] = 1;
}
int find(int x) {
if (p[x] != x) {
// 路径压缩
p[x] = find(p[x]);
}
return p[x];
}
void union(int a, int b) {
int pa = find(a), pb = find(b);
if (pa == pb) {
return;
}
p[pa] = pb;
size[pb] += size[pa];
}vector<int> p(n);
iota(p.begin(), p.end(), 0);
vector<int> size(n, 1);
int find(int x) {
if (p[x] != x) {
// 路径压缩
p[x] = find(p[x]);
}
return p[x];
}
void unite(int a, int b) {
int pa = find(a), pb = find(b);
if (pa == pb) return;
p[pa] = pb;
size[pb] += size[pa];
}p := make([]int, n)
size := make([]int, n)
for i := range p {
p[i] = i
size[i] = 1
}
func find(x int) int {
if p[x] != x {
// 路径压缩
p[x] = find(p[x])
}
return p[x]
}
func union(a, b int) {
pa, pb := find(a), find(b)
if pa == pb {
return
}
p[pa] = pb
size[pb] += size[pa]
}class Solution:
def validPath(self, n: int, edges: List[List[int]], source: int, destination: int) -> bool:
def dfs(i):
if i == destination:
return True
vis.add(i)
for j in g[i]:
if j not in vis and dfs(j):
return True
return False
g = defaultdict(list)
for a, b in edges:
g[a].append(b)
g[b].append(a)
vis = set()
return dfs(source)class Solution:
def validPath(self, n: int, edges: List[List[int]], source: int, destination: int) -> bool:
def find(x):
if p[x] != x:
p[x] = find(p[x])
return p[x]
p = list(range(n))
for u, v in edges:
p[find(u)] = find(v)
return find(source) == find(destination)class Solution {
private boolean[] vis;
private List<Integer>[] g;
public boolean validPath(int n, int[][] edges, int source, int destination) {
vis = new boolean[n];
g = new List[n];
Arrays.setAll(g, k -> new ArrayList<>());
for (var e : edges) {
int a = e[0], b = e[1];
g[a].add(b);
g[b].add(a);
}
return dfs(source, destination);
}
private boolean dfs(int source, int destination) {
if (source == destination) {
return true;
}
vis[source] = true;
for (int nxt : g[source]) {
if (!vis[nxt] && dfs(nxt, destination)) {
return true;
}
}
return false;
}
}class Solution {
private int[] p;
public boolean validPath(int n, int[][] edges, int source, int destination) {
p = new int[n];
for (int i = 0; i < n; ++i) {
p[i] = i;
}
for (int[] e : edges) {
p[find(e[0])] = find(e[1]);
}
return find(source) == find(destination);
}
private int find(int x) {
if (p[x] != x) {
p[x] = find(p[x]);
}
return p[x];
}
}class Solution {
public:
bool validPath(int n, vector<vector<int>>& edges, int source, int destination) {
vector<bool> vis(n);
vector<vector<int>> g(n);
for (auto& e : edges) {
int a = e[0], b = e[1];
g[a].emplace_back(b);
g[b].emplace_back(a);
}
function<bool(int)> dfs = [&](int i) -> bool {
if (i == destination) return true;
vis[i] = true;
for (int& j : g[i]) {
if (!vis[j] && dfs(j)) {
return true;
}
}
return false;
};
return dfs(source);
}
};class Solution {
public:
bool validPath(int n, vector<vector<int>>& edges, int source, int destination) {
vector<int> p(n);
iota(p.begin(), p.end(), 0);
function<int(int)> find = [&](int x) -> int {
if (p[x] != x) p[x] = find(p[x]);
return p[x];
};
for (auto& e : edges) p[find(e[0])] = find(e[1]);
return find(source) == find(destination);
}
};func validPath(n int, edges [][]int, source int, destination int) bool {
vis := make([]bool, n)
g := make([][]int, n)
for _, e := range edges {
a, b := e[0], e[1]
g[a] = append(g[a], b)
g[b] = append(g[b], a)
}
var dfs func(int) bool
dfs = func(i int) bool {
if i == destination {
return true
}
vis[i] = true
for _, j := range g[i] {
if !vis[j] && dfs(j) {
return true
}
}
return false
}
return dfs(source)
}func validPath(n int, edges [][]int, source int, destination int) bool {
p := make([]int, n)
for i := range p {
p[i] = i
}
var find func(x int) int
find = func(x int) int {
if p[x] != x {
p[x] = find(p[x])
}
return p[x]
}
for _, e := range edges {
p[find(e[0])] = find(e[1])
}
return find(source) == find(destination)
}