Replies: 1 comment 3 replies
-
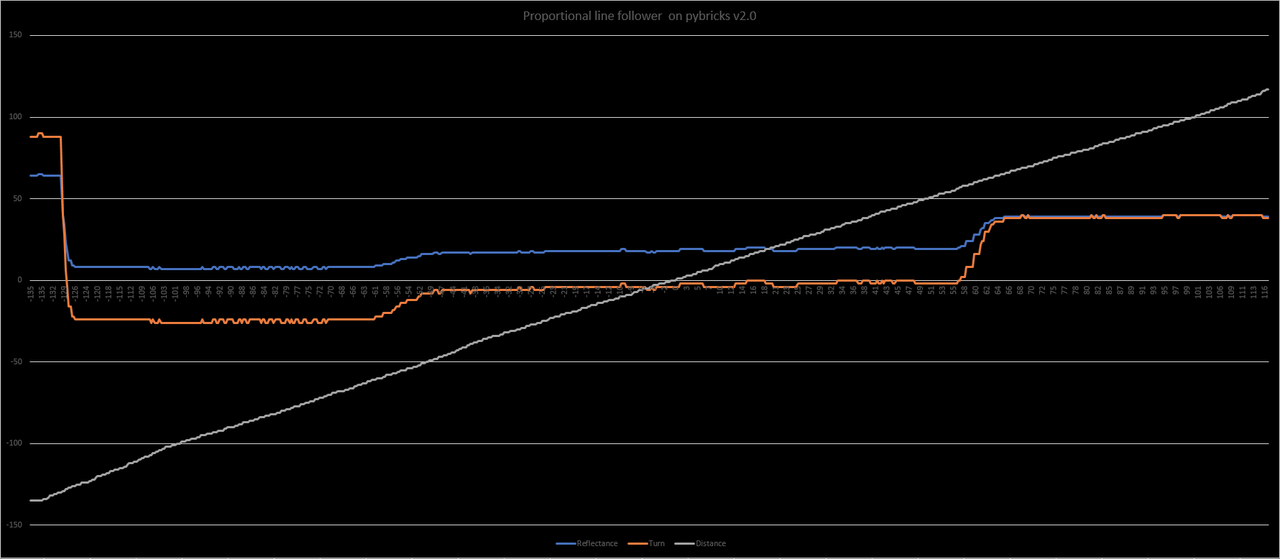
Proportional line follower gone badThe first issue and currently the deal breaking one for the team (in using v3.3.) is that line follower code that works fine in v2.0 works badly in v3.3 (build 2828). With some debug prints we discovered that the loop runs some 3 times faster on v3.3 (makes 3 times more passes) for the same distance the The line follower code is this: def TrackLineDistance(robot:DriveBase, distance:int, speed:int,
sensor:ColorSensor, isLeftSide:bool,
sensorThreshold:int, proportionalGain:float):
sign = -1
if isLeftSide:
sign = 1
robot.reset
while robot.distance() < distance:
deviation = sensor.reflection() - sensorThreshold
turn_rate = proportionalGain * deviation * sign
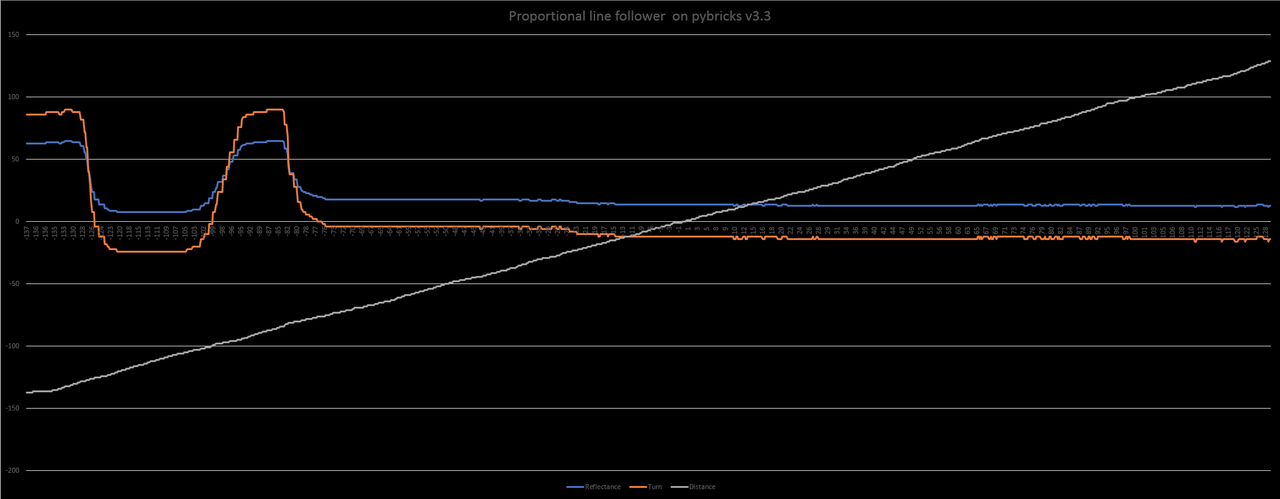
robot.drive(speed, turn_rate)The parameters pass to The team tried changing the speed and gain but it did not change much. Here is a graph of the v2.0 data: And graph of v3.3 data: Notice the "hump" in v3.3 that is not there in v2.0 - it is the robot passing over the other edge of the line into white area and then into blue area where it wanders off mostly straight. What could be the reason v3.3. is behaving so differently? |
Beta Was this translation helpful? Give feedback.
-
|
I think this is the same as #1035. This is why we currently don't release EV3 versions and recommend that people use 2.0 for the time being :) But we do get quite a lot of questions from WRO teams about this, so hopefully we can pick this up at some point. |
Beta Was this translation helpful? Give feedback.
-
|
Thanks! I am aware about potential problems with v3.x on EV3, of course. Reading posts in #1035, looks like these things were appearing on and off after v3.2 - can I get that version please? Interesting is that other driving code worked just fine. Is this something about doing |
Beta Was this translation helpful? Give feedback.
-
|
Yes, that’s always good. |
Beta Was this translation helpful? Give feedback.
-
Intro: I'm co-coaching my son's school team which is preparing for national WRO competition. The v2.0 works fine up to its limits, one of largest being that
DriveBasehasStop.HOLDas default and no way to change it (like usingthenparameter in v3.x), what makes movements jerky. I assume this could be worked around with some clever code but, hey, they are just kids starting with Python and "robotics" and would be happy to see such a thing working out-of -the-box (like they found it in the docs, alas, for v3.2).Last week I have finally found the eluding EV3 "pybricks-micropython" executable (thanks David!) and have successfully installed it (cookbook here.
It works well so far apart from some issues, which I intend to post here in this thread and, hopefully, get some constructive responses from the community 🙂
Beta Was this translation helpful? Give feedback.
All reactions