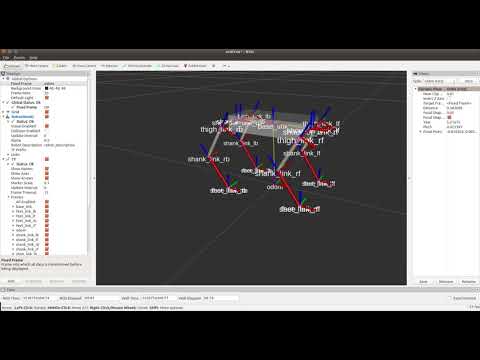
A ROS driver for a 12 DOF quadruped robot. Project page: http://zlethic.com/quadruped-9g/ Inverse Kinematics Walk