-
Notifications
You must be signed in to change notification settings - Fork 0
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
Showing
6 changed files
with
168 additions
and
0 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,75 @@ | ||
| --- | ||
| title: 基于搜索的路径规划 | ||
| date: | ||
| created: 2024-10-10 | ||
| updated: 2024-10-10 | ||
| categories: | ||
| - 机器人 | ||
| --- | ||
|
|
||
| ## 1. 图搜索基础 | ||
|
|
||
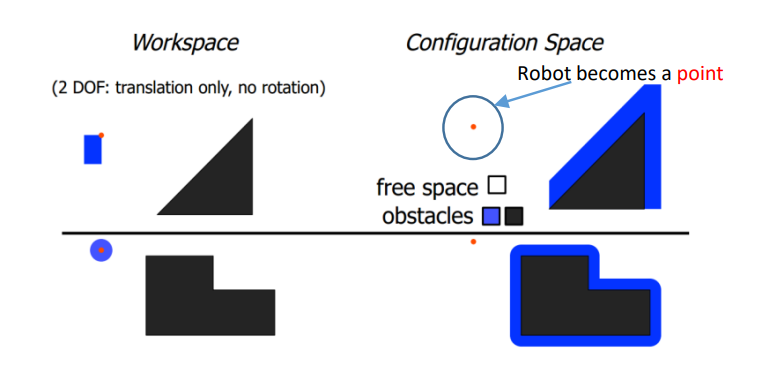
| ### 1.1 配置空间 | ||
|
|
||
| 一个n维空间,其中每一个点代表一个机器人的位姿 | ||
|
|
||
| <!-- more --> | ||
|
|
||
| >在配置空间中规划 | ||
|  | ||
|
|
||
| ### 1.2 图搜索 | ||
|
|
||
| 1. 构建graph | ||
|
|
||
| - 栅格地图: 天然就是一个graph | ||
| - PRM: 随机采样点,然后连接成图 | ||
|
|
||
| 2. 图搜索主循环 | ||
|
|
||
| - 维护一个容器存储所有待访问的节点 | ||
| - 容器初始节点为start | ||
| - 循环 | ||
| - pop | ||
| - expansion | ||
| - push | ||
| - 结束循环 | ||
|
|
||
| ### 1.3 启发式搜索 | ||
|
|
||
| 存储节点,根据启发式函数排序 | ||
|
|
||
| - 贪心搜索: $f(n) = h(n)$ | ||
| - A*搜索: $f(n) = g(n) + h(n)$ | ||
| - Dijkstra: $f(n) = g(n)$ | ||
|
|
||
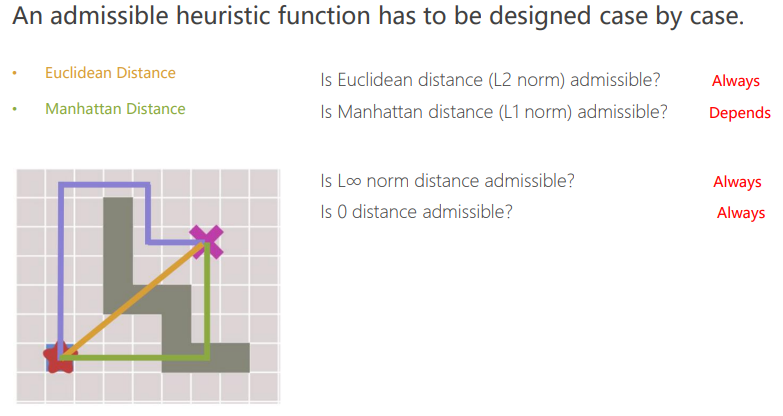
| 启发式函数:$h(n)$ 估计从n到goal的代价 | ||
|
|
||
| - 曼哈顿距离 L1 norm | ||
| - 欧几里得距离 L2 norm | ||
| - 切比雪夫距离 L∞ norm | ||
|
|
||
|
|
||
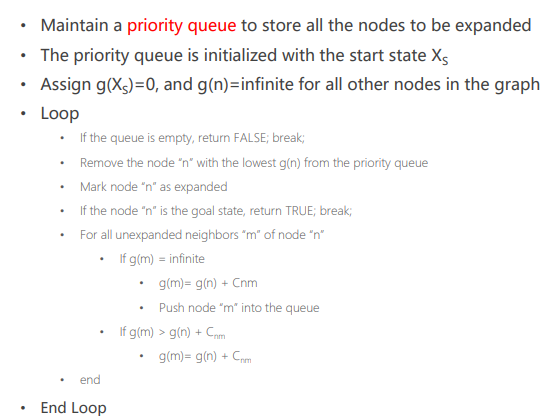
| ## 2. Dijkstra和A*算法 | ||
|
|
||
| ### 2.1 Dijkstra算法 | ||
|
|
||
| $g(n)$: 从start到n的最少代价 | ||
|
|
||
|  | ||
|
|
||
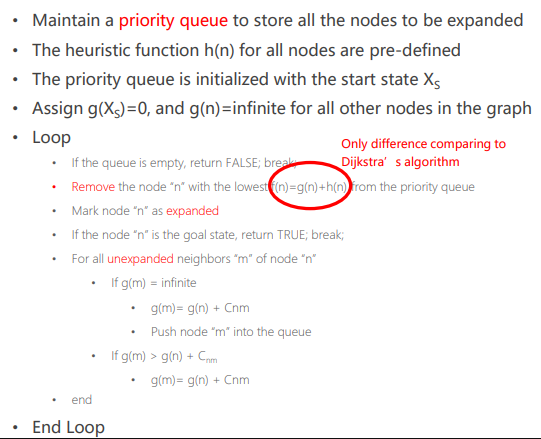
| ### 2.2 A*算法 | ||
|
|
||
|  | ||
|
|
||
| !!! note "Admissible启发式函数:$h(n) \leq h^*(n)$" | ||
|
|
||
|
|
||
|  | ||
|
|
||
| ### 2.3 Weighted A* | ||
|
|
||
| $f(n) = g(n) + \epsilon \cdot h(n), \epsilon > 1$ | ||
|
|
||
| - $\epsilon = 1$ 时,等价于A* | ||
| - $\epsilon > 1$ 时,更倾向于贪心搜索 |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,13 @@ | ||
| 沿路时需要贴近+减少腾挪 | ||
|
|
||
| ## 条件: | ||
| - 原始参考线足够直: simplify后点数为2 | ||
| - 机器人右侧是路,且路的边缘足够直: PCA拟合直线 | ||
| - 原始参考线和路的边缘几乎平行 | ||
| - 机器人与路的边缘几乎平行 | ||
|
|
||
| ## 规划 | ||
| - 将路的边缘进行平移,以此为参考线进行纯轨迹跟踪 | ||
|
|
||
|
|
||
|
|
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,13 @@ | ||
| # 沿边过窄道 | ||
|
|
||
| ## 机器人基本参数 | ||
| 机器人现状近似长方形,长0.6m,宽0.4m | ||
|
|
||
| ## 环境表示 | ||
| 障碍物由多边形表示。 | ||
|
|
||
| ## 目前方案 | ||
|
|
||
| 对障碍物进行膨胀半车宽(0.2m)+额定沿边距离(0.08m),得到参考线,机器人沿着参考线进行行驶,就可以实现沿边的过程同时基本保持和障碍物距离0.08m | ||
|
|
||
| 缺点: 由于是对所有障碍物膨胀了0.28m,因此假设两个障碍物直接的最小距离为0.45m,即小于半车宽,理论上机器人应该从障碍物中间穿过,但是对两个障碍物分别膨胀0.28m后,膨胀后的参考线是绕过这两个障碍物 |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,47 @@ | ||
| 行为树有Sequence Fallback RetryUntilSuccessful ReactiveSequence等控制节点。 | ||
|
|
||
| 我还有如下动作节点: | ||
| BreakCheck | ||
| BreakHandle | ||
| StartCutter | ||
| Plan | ||
| Escape | ||
| ForceFinish | ||
| ClosureCheck | ||
| FinishCheck | ||
| CalcNavigationTarget | ||
| Navigation | ||
| ArriveTargetCheck | ||
|
|
||
| 我想实现的逻辑如下: | ||
| ``` cpp | ||
| while (true) { | ||
| if (BreakCheck) { | ||
| BreakHandle; | ||
| StartCutter; | ||
| } | ||
| if (!Plan) { | ||
| if (Escape) { | ||
| StartCutter; | ||
| } else { | ||
| return SUCCESS; | ||
| } | ||
| } | ||
| if (ClosureCheck) { | ||
| if (FinishCheck) { | ||
| return SUCCESS; | ||
| } else { | ||
| for (int i = 0; i < 3; ++ i) { | ||
| CalcNavigationTarget; | ||
| if (Navigation) { | ||
| break; | ||
| } | ||
| } | ||
| if (!ArriveTargetCheck) { | ||
| return SUCCESS; | ||
| } | ||
| } | ||
| } | ||
| return RUNNING; | ||
| } | ||
| ``` |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,10 @@ | ||
| document$.subscribe(({ body }) => { | ||
| renderMathInElement(body, { | ||
| delimiters: [ | ||
| { left: "$$", right: "$$", display: true }, | ||
| { left: "$", right: "$", display: false }, | ||
| { left: "\\(", right: "\\)", display: false }, | ||
| { left: "\\[", right: "\\]", display: true } | ||
| ], | ||
| }) | ||
| }) |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters