-
Notifications
You must be signed in to change notification settings - Fork 0
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
Showing
2 changed files
with
87 additions
and
0 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,39 @@ | ||
| --- | ||
| title: 基于优化的轨迹规划 | ||
| date: | ||
| created: 2024-10-30 | ||
| updated: 2024-10-30 | ||
| categories: | ||
| - 机器人 | ||
| - 移动机器人运动规划 | ||
| --- | ||
|
|
||
| ## 1. 全局方法 和 局部方法 | ||
|
|
||
| 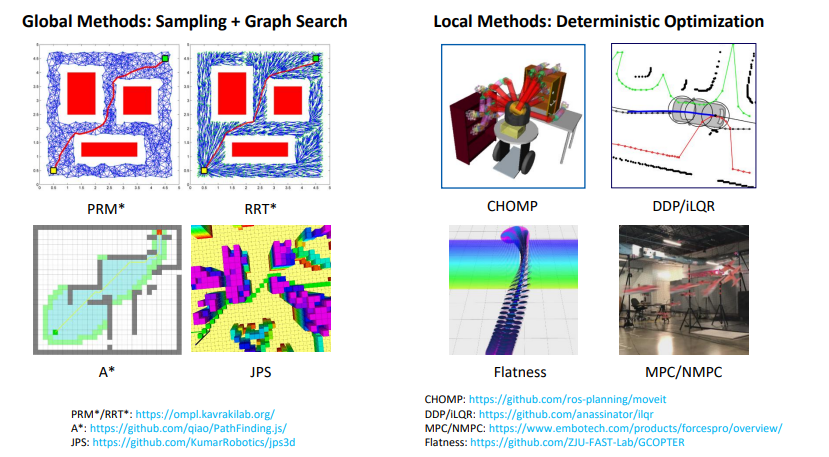 | ||
|
|
||
| <!-- more --> | ||
|
|
||
| ## 2. 轨迹规划 | ||
|
|
||
| ### 2.1 什么是轨迹 | ||
|
|
||
| 时间参数化的路径 | ||
|
|
||
| ### 2.2 平滑意味着什么 | ||
|
|
||
| 1. 满足动力学约束 $\dot{x} = f(x, u)$ | ||
| 2. 最小化能量泛函 $min \int_{t_0}^{t_f} L(x(t), u(t)) dt$ | ||
|
|
||
| ### 2.3 为什么需要轨迹优化 | ||
|
|
||
| 1. 能量最优 | ||
| 2. 时间最优 | ||
| 3. 驱动器限制 | ||
| 4. 任务需求 (保持fov) | ||
|
|
||
| ## 3. 微分平坦(Differential Flatness) | ||
|
|
||
| 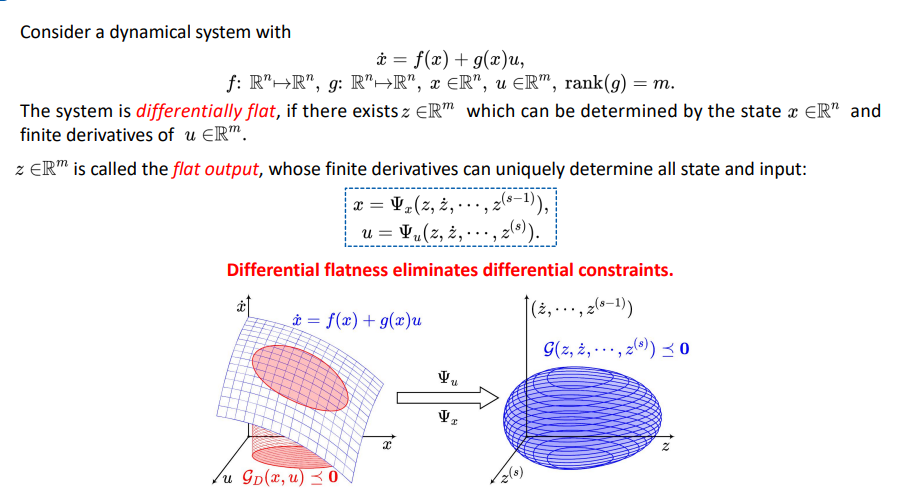 | ||
|
|
||
| 微分平坦是使用系统的输出和输出的导数对系统的状态$x$和输入$u$进行描述,从而把系统方程$\dot{x} = f(x) + g(x)u$约束消掉 |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,48 @@ | ||
| --- | ||
| title: 常微分方程简介 | ||
| date: | ||
| created: 2024-11-22 | ||
| updated: 2024-11-26 | ||
| categories: | ||
| - 数学 | ||
| --- | ||
|
|
||
| ## 1. 常微分方程的定义 | ||
|
|
||
| k阶常微分方程 (ODE of order k): | ||
|
|
||
| $$ F(t, x, \dot{x}, ..., x^{(k)}) = 0 $$ | ||
|
|
||
| ### 1.1 autonomous ODE | ||
|
|
||
| - **autonomous** ODE: $\dot{x} = w(t, x)$ | ||
| - non-autonomous ODE: $\dot{x} = v(x)$ | ||
|
|
||
| ### 1.2 homogeneous ODE | ||
|
|
||
| - **homogeneous** ODE: $\dot{x} = A(t)v(x)$ | ||
| - non-homogeneous ODE: $\dot{x} = A(t)v(x) + B(t)$ | ||
|
|
||
| ### 1.3 linear ODE | ||
|
|
||
| - **linear** ODE: $\dot{x} = A(t)x + B(t)$ | ||
|
|
||
| <!-- more --> | ||
|
|
||
| !!! note "Lipschitz Continuity" | ||
|
|
||
| $$ |f(z) - f(y)| \leq L|z - y| $$ | ||
|
|
||
| !!! note "Banach Fixed Point Theorem" | ||
|
|
||
| 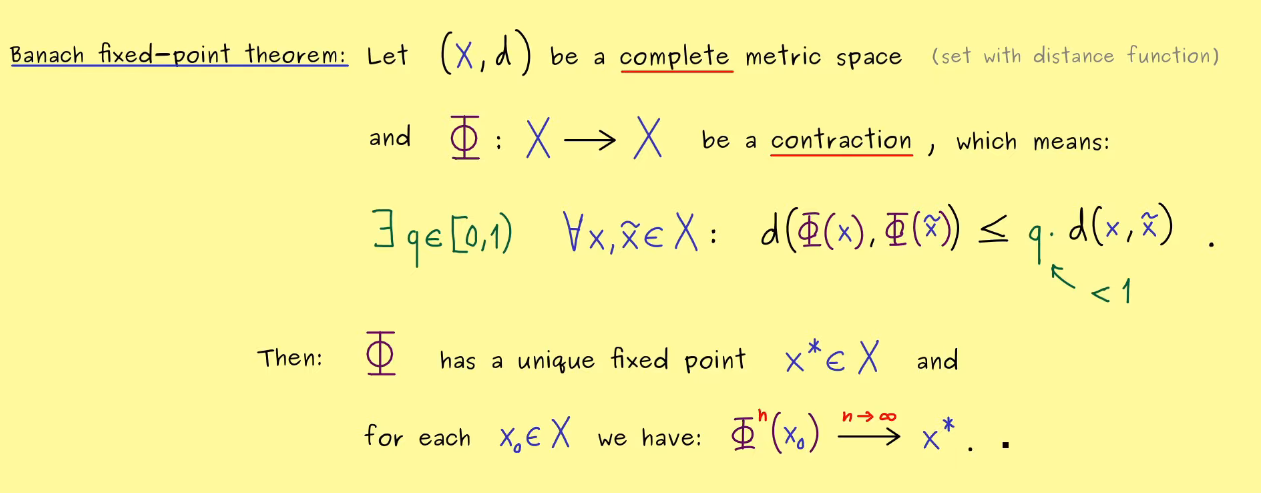 | ||
|
|
||
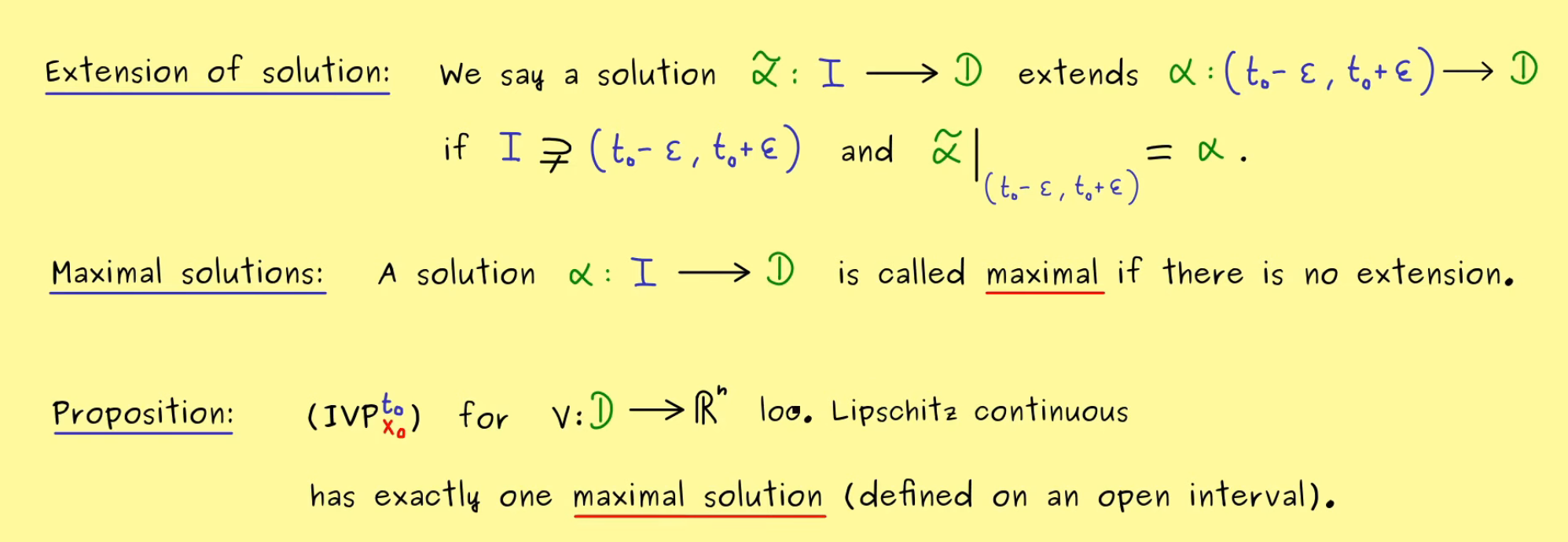
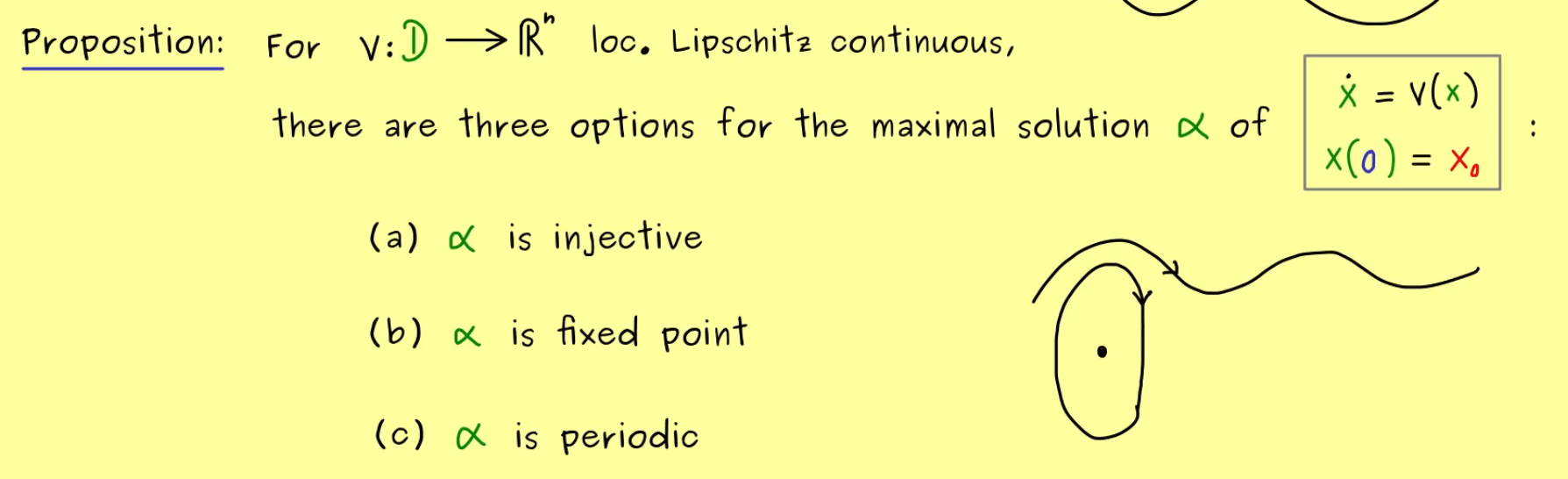
| !!! note "Picard-Lindelöf Theorem" | ||
|
|
||
| 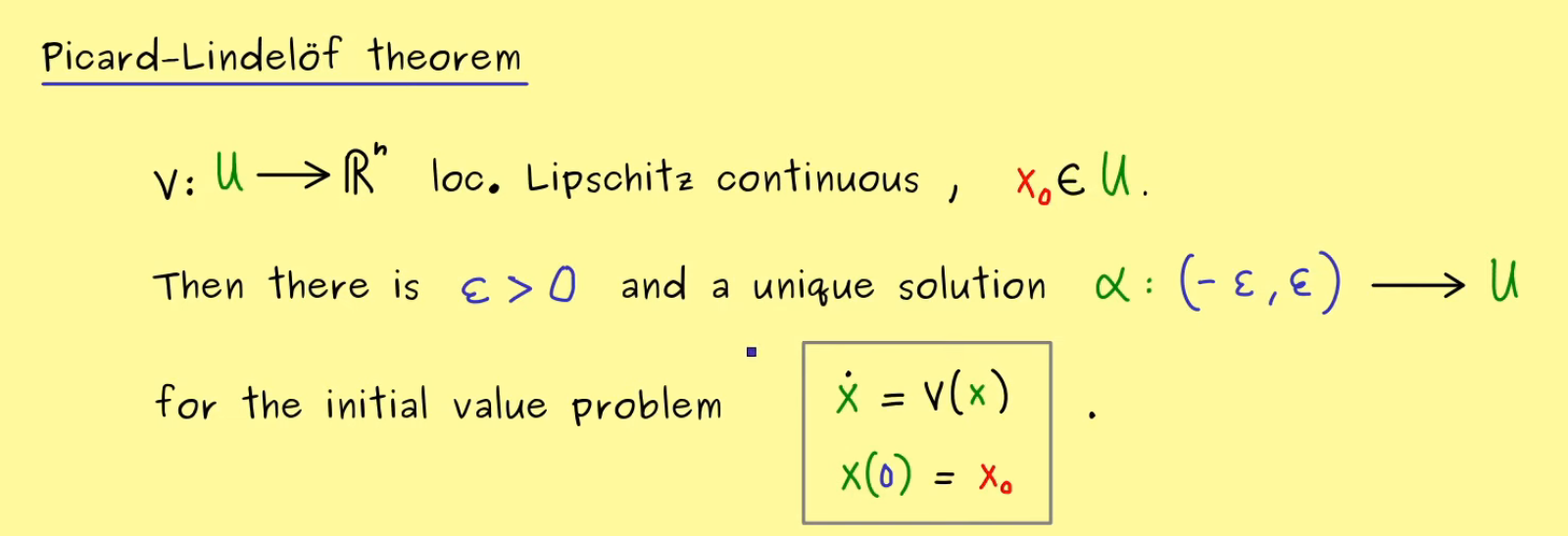 | ||
|
|
||
|  | ||
|
|
||
|  | ||
|
|
||
|  |