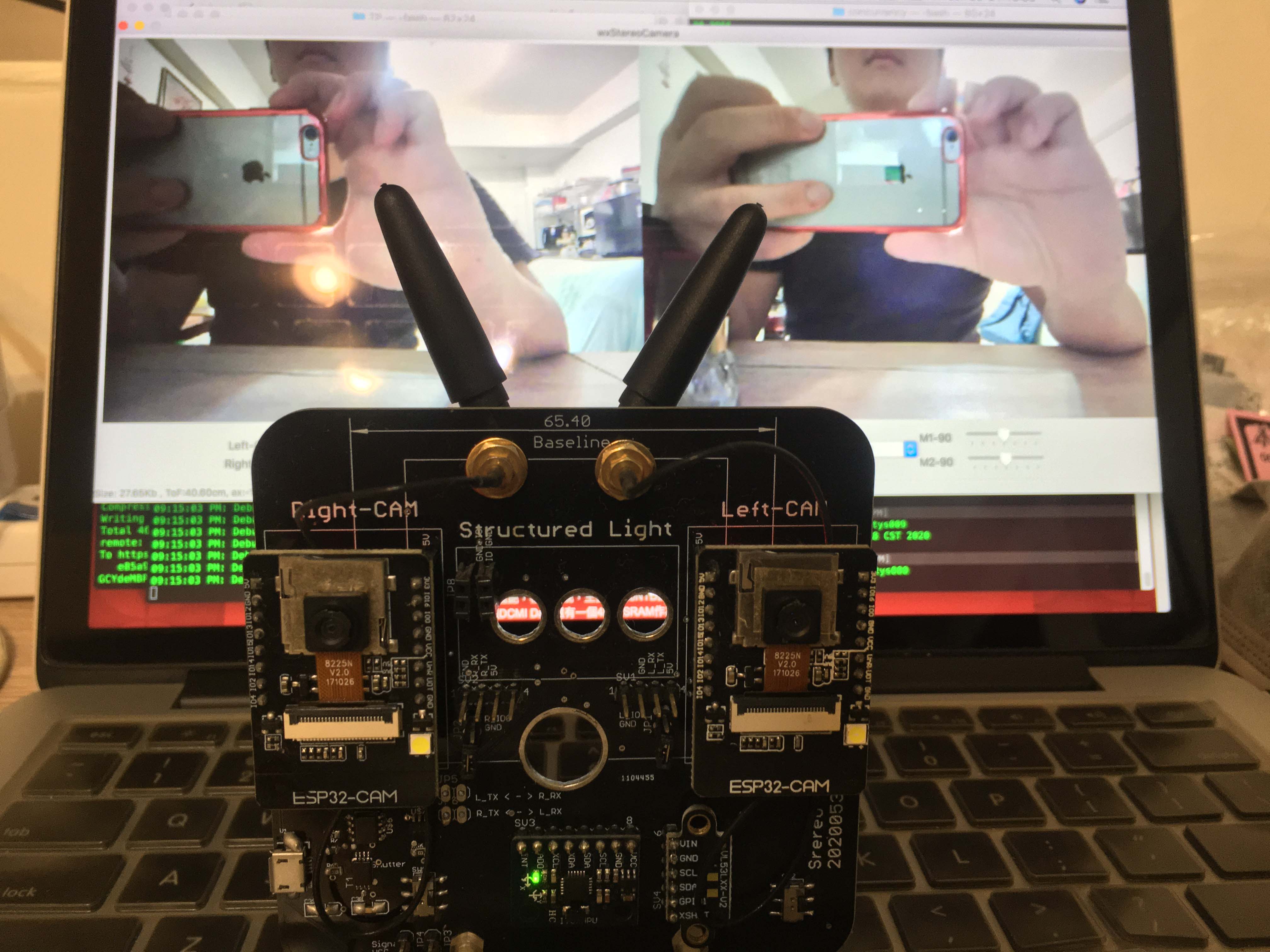

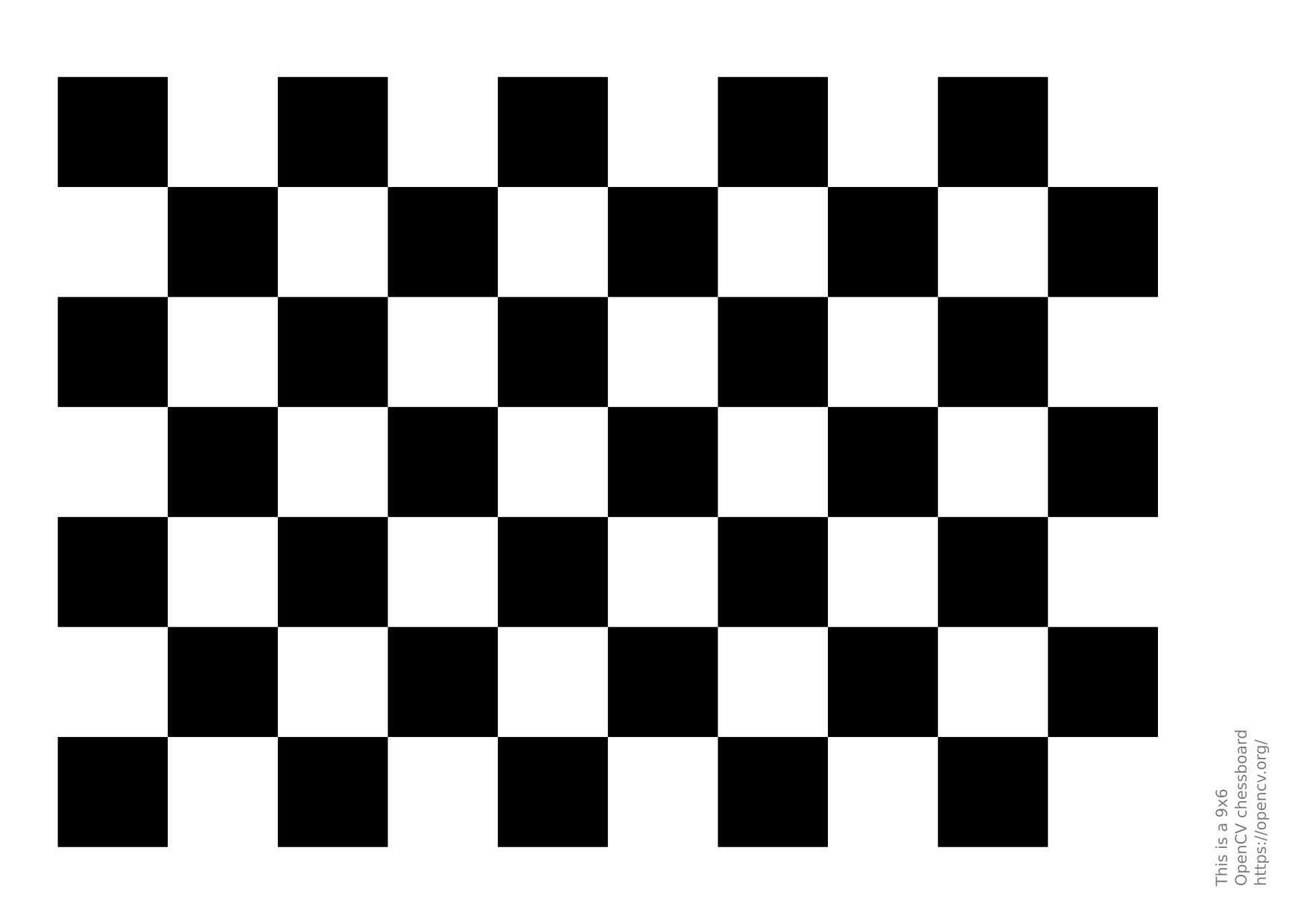
- Step 1. Capture the chessboard pattern picture from Left and Right Camera.
- Step 2. Run "Stereo Camera Calibration"
- Step 3. Calibration stereo camera phase, execute initUndistortRectifyMap with "extrinsics.yml" and "intrinsics.yml" befor cv::remap
- Step 4. Create StereoBM or SGBM object to calculate depth map.
- Step 5. Cet point cloud from depth map and baseline.
{kind=link}
- wxWidgets 3.0.4
- OpenCV 4.4.0
- libcurl 7.54.0
cd ./App/Mac/wxStereoCamera
make
- wxWidgets 3.1.4
- OpenCV 4.4.0
- libcurl 7.67.0
Build App/Win10/wxStereoCamera/wxStereoCamera.sln with Visual Studio Community 2019Copyright (C) 2020 TonyGUO https://github.com/GCY.
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.