-
Notifications
You must be signed in to change notification settings - Fork 26
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Merge pull request #10 from Infineon/version2
Version2 - including Sensor2Kits with 3-Wire SPI - many addtitional functions and features included - new examples
- Loading branch information
Showing
46 changed files
with
12,059 additions
and
1,516 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,38 +1,31 @@ | ||
| language: python | ||
| python: | ||
| - "2.7" | ||
|
|
||
| sudo: required | ||
|
|
||
| branches: | ||
| only: | ||
| - master | ||
| - version2 | ||
|
|
||
| env: | ||
| global: | ||
| - USR_NAME="mhoechner" | ||
| - USR_EMAIL="Moritz.Hoechner@infineon.com" | ||
| # new token needs to be generated & encrypted | ||
| - secure: OLSYr2ioMsqS+l43+s+yzfaVeCTK0Z1ky+Tm31bHdU66Ahq8+ZiDNX4fVDuziJtuHJWR3pEmqnYdSqSqcuByObM+I7uW3RaV2fOAtvCnWQcar5jt0+TYHuuLbfLu7vsL6ntBkQJXWibLO3JlVFp8ZVNd33WUE0mrnNdR7xormwy6EV7Ry9X/j43G+zHGjAKXxcfWIKs279pHvhtye4Vhlg3U8MkEwlkgpGiMbpWmk5CaePTi82KuoIOAceVZ8ixssuqpt4DgCnl7m6t1D+8MnjXxPLISvOr0pHNHTJ+3/gv1dGUrxENyPiW9d1q8OnrKyD9CniqC6Rklj+g5mhR+v+FJvjfa2k85SXVvFYikkqUyXkIVZkJu+PxZX0mfY18SbI7GB8mOkjgcusI9KhzNhZJQxUzza/DBe2MOR72mHVdpHlsOtx/1PjaUjJtS6lFBBZw1gCKYsFkGU3UfY+Jr3yajU1veCICgde0gm3SfhCDsQVymi7hsfnbBj8YhrY1K5+YJ6JHk5Wu6x2SsT8Al2/YSZoDdUDCZZ8Y4WNO+ZY2vF0ZU3jOcK/JSuLV6W7VzXAhSaYHVAHq2fXNgW7EWkRaLeFGtjgwvZIkhQ1Mrsl6oObMJhFhaD6vP4MlwvTWKp0MB8NdFWsgR2ITU80sREp4RBzJVSQIvLiBCIwi0upY= | ||
| matrix: | ||
| - PLATFORMIO_CI_SRC=examples/Read_Angle_Speed_Revolutions | ||
| - PLATFORMIO_CI_SRC=examples/Read_Angle_Value_Processing | ||
| - PLATFORMIO_CI_SRC=examples/Read_Multiple_Registers | ||
| - PLATFORMIO_CI_SRC=examples/Read_Sensor_Type | ||
| - PLATFORMIO_CI_SRC=examples/Read_Speed_Processing | ||
| - PLATFORMIO_CI_SRC=examples/Read_Test | ||
| - PLATFORMIO_CI_SRC=examples/Read_Test_With_SlaveNumber | ||
| - PLATFORMIO_CI_SRC=examples/Read_Write_Registers | ||
|
|
||
| - PLATFORMIO_CI_SRC=examples/ReadAngleTest | ||
|
|
||
| install: | ||
| # build with stable core | ||
| - pip install -U platformio | ||
| - platformio platform install https://github.com/Infineon/platformio-infineonxmc.git | ||
| script: | ||
| - platformio ci --lib="." --board=xmc1100_xmc2go --board=xmc1100_boot_kit --board=xmc1100_h_bridge2go --board=xmc1300_boot_kit --board=xmc4700_relax_kit --project-option="lib_deps=Wire" | ||
| - platformio platform install -f infineonxmc | ||
| - platformio platform install -f atmelavr | ||
|
|
||
| after_success: | ||
| # only build once (after one job by checking id, however this does not work reliably) | ||
| # - | | ||
| # if [ $(($TRAVIS_JOB_ID - $TRAVIS_BUILD_ID)) -eq 2 ]; then | ||
| # export REPO_NAME=${TRAVIS_REPO_SLUG#*/} | ||
| # git clone https://github.com/Infineon/InfineonDoxyGenerator.git | ||
| # cd well-automated-documentation/docs | ||
| # # cd $TRAVIS_BUILD_DIR/docs | ||
| # chmod +x publish_pdf.sh | ||
| # ./publish_pdf.sh | ||
| # fi | ||
| script: | ||
| - platformio ci --lib="." --board=xmc1100_xmc2go --board=xmc1100_boot_kit --board=xmc4700_relax_kit --board=uno |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,28 @@ | ||
| # Examples2Go | ||
|
|
||
| ## List of examples | ||
| To run this exampls use either the Arduino IDE or somthing simillar like the [PlatformIO](https://platformio.org/platformio-ide?utm_source=github&utm_medium=xmc-for-arduino) module for [code](https://code.visualstudio.com/) or [atom](https://atom.io/) | ||
| * examples/Read_Angle_Speed_Revolutions/Read_Angle_Speed_Revolutions.ino | ||
| * examples/Read_Angle_Value_Processing/Read_Angle_Value_Processing.ino | ||
| * examples/Read_Multiple_Registers/Read_Multiple_Registers.ino | ||
| * examples/Read_Sensor_Registers/Read_Sensor_Registers.ino | ||
| * examples/Read_Sensor_Type/Read_Sensor_Type.ino | ||
| * examples/Read_Speed_Processing/Read_Speed_Processing.ino | ||
| * examples/Read_Test/Read_Test.ino | ||
| * examples/Read_Test_With_SlaveNumber/Read_Test_With_SlaveNumber.ino | ||
| * examples/Read_Write_Registers/Read_Write_Registers.ino | ||
| * examples/ReadAngleTest/ReadAngleTest.ino | ||
|
|
||
| ## Processing files | ||
| Use this link for using [Processing](https://processing.org/). All of this exampls need either | ||
| the Read_Angle_Value_Processing.ino or the Read_Angle_Value_Processing.ino scetches | ||
| to be running. See the explanations inside the soruce code. | ||
| * processing/Ball_Bat/Ball_Bat.pde | ||
| * processing/Bouncing_Ball_Game/Bouncing_Ball_Game.pde | ||
| * processing/Circle/Circle.pde | ||
| * processing/Make_Spiral/Make_Spiral.pde | ||
| * processing/pong/pong.pde | ||
| * processing/Snake/SnakeGame/SnakeGame.pde | ||
| * processing/Snake_Like_Game/Snake_Like_Game.pde | ||
| * processing/speed/speed.pde | ||
|
|
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,23 @@ | ||
| # Installation | ||
|
|
||
| ## Integration of Library | ||
| Please download this repository from GitHub by clicking on the following field in the latest [release](https://github.com/Infineon/TLE5012-Magnetic-Angle-Sensor/releases) of this repository: | ||
|
|
||
| 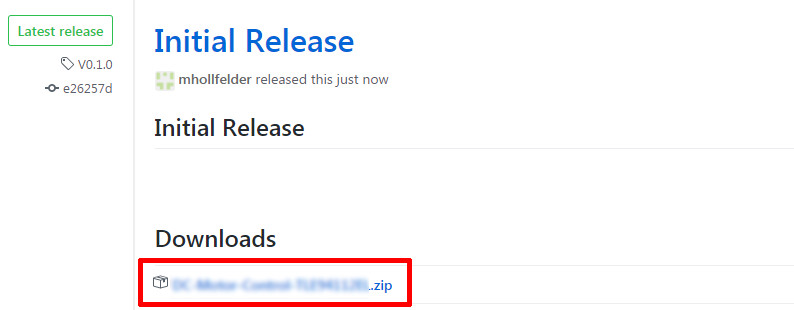 | ||
|
|
||
| To install the TLE5012B angle sensor library in the Arduino IDE, please go now to **Sketch** > **Include Library** > **Add .ZIP Library...** in the Arduino IDE and navigate to the downloaded .ZIP file of this repository. The library will be installed in your Arduino sketch folder in libraries and you can select as well as include this one to your project under **Sketch** > **Include Library** > **TLE5012B**. | ||
|
|
||
| 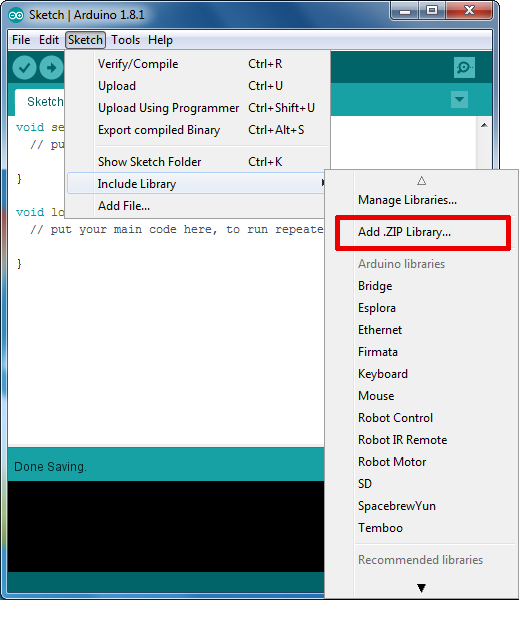 | ||
|
|
||
| ## Usage | ||
| Please follow the example sketches in the /examples directory in this library to learn more about the usage of the library. Especially, take care of the SPI and I²C configuration of the sensor. For more information, please consult the datasheet [here](https://www.infineon.com/dgdl/Infineon-Angle_Sensor_TLE5012B-UM-v01_02-en-UM-v01_02-EN.pdf?fileId=5546d46146d18cb40146ec2eeae4633b). | ||
| For more information: | ||
| * see here for the sensors user manual [TLE5012B](https://www.infineon.com/cms/en/product/sensor/magnetic-position-sensor/angle-sensor/tle5012b-e1000/) | ||
| * you can find several application notes concerning the sensor position and disc magnet design on the same page | ||
| * there is a handy [pin out picture](https://raw.githubusercontent.com/infineon/assets/master/Pictures/TLE5012B_Sensor_2Go_Pin_out.png) | ||
| <img src="https://raw.githubusercontent.com/infineon/assets/master/Pictures/TLE5012B_Sensor_2Go_Pin_out.png" width=100%> | ||
|
|
||
| ## Installation of XMC | ||
| If you use a Sensor2Go evolution kit or any Infineon XMC microcontroller like the XMC1100 Boot Kit or the XMC4700 Relax Kit, than you must also | ||
| install the [XMC-for-Arduino library from here](https://github.com/Infineon/XMC-for-Arduino). | ||
| The Sensor2Go will be recognized as MC1100 XMC 2Go. |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,49 @@ | ||
| ################################################################################## | ||
| # documentation build files | ||
| # - generates the html doxygen documentation | ||
| # needed software: | ||
| # - graphviz dot | ||
| # - doxygen 1.8.15 or higher | ||
|
|
||
| # Directories | ||
| SRC_DIR ?= ../ | ||
| DOC_DIR ?= ./ | ||
| DOC_IMG_DIR ?= ./img | ||
| DOC_BUILD_DIR ?= ./ | ||
| DOT_PATH ?= /usr/bin/dot | ||
| # General settings | ||
| DOXYFILE ?= doxyfile_html | ||
| WORKING_DOXYFILE ?= temp_doxyfile | ||
| PROJECT_LOGO ?= ./img/ifx_logo.png | ||
| DOXYGEN_WARNING ?= warn.log | ||
|
|
||
| # Tools | ||
| CD ?= cd | ||
| ECHO ?= echo | ||
| DOXYGEN_ECHO ?= echo | ||
| RM ?= rm | ||
| RM_DIR ?= rm -rf | ||
| COPY ?= cp | ||
| DOXYGEN ?= ${DOXY_BIN_PATH}/doxygen | ||
|
|
||
| html: | ||
| @$(ECHO) Generating $@ | ||
| @$(COPY) $(DOXYFILE) $(WORKING_DOXYFILE) | ||
| @$(DOXYGEN_ECHO) >> $(WORKING_DOXYFILE) | ||
| @$(DOXYGEN_ECHO) INPUT=$(SRC_DIR) >> $(WORKING_DOXYFILE) | ||
| @$(DOXYGEN_ECHO) PROJECT_NAME="Tle5012b" >> $(WORKING_DOXYFILE) | ||
| @$(DOXYGEN_ECHO) OUTPUT_DIRECTORY = $(DOC_BUILD_DIR) >> $(WORKING_DOXYFILE) | ||
| @$(DOXYGEN_ECHO) PROJECT_LOGO = $(PROJECT_LOGO) >> $(WORKING_DOXYFILE) | ||
| @$(DOXYGEN_ECHO) IMAGE_PATH = $(DOC_IMG_DIR) >> $(WORKING_DOXYFILE) | ||
| @$(DOXYGEN_ECHO) DOT_PATH = "$(DOT_PATH)" >> $(WORKING_DOXYFILE) | ||
| @$(DOXYGEN) $(WORKING_DOXYFILE) | ||
|
|
||
| clean: | ||
| @$(ECHO) Removing build directory | ||
| @$(RM_DIR) $(DOC_BUILD_DIR) | ||
| @$(ECHO) Removing temporary files | ||
| @$(RM) $(DOXYGEN_WARNING) | ||
| @$(RM) $(WORKING_DOXYFILE) | ||
| @$(RM) $(LIBRARY_NAME).pdf | ||
|
|
||
| .PHONY: lib_doc clean |
Binary file not shown.
Oops, something went wrong.