- 解决livox系列雷达在gazebo9仿真环境中无法输出sensor_msgs::PointCloud2和livox_ros_driver/CustomMsg点云问题
- 修复
https://github.com/lvfengchi/livox_laser_simulation代码中gazebo7和9无法适配问题
- 安装ode: https://bitbucket.org/odedevs/ode/src/master/
- catkin_make
- 将livox雷达的xacro文件导入到自己机器人中,其中publish_pointcloud_type = 3为发布livox_ros_driver/CustomMsg格式点云
<xacro:macro name="Livox_gazebo_sensor" params="visualize:=True update_rate:=10 resolution:=0.002 noise_mean:=0.0 noise_stddev:=0.01 name:=livox ros_topic:=/livox/lidar publish_pointcloud_type:=1">
<gazebo reference="${name}">
<sensor type="ray" name="${name}">
<pose>0 0 0 0 0 0</pose>
<visualize>True</visualize>
<update_rate>${update_rate}</update_rate>
<!-- This ray plgin is only for visualization. -->
<plugin name="gazebo_ros_laser_controller" filename="liblivox_laser_simulation.so">
<robotNamespace>urobot</robotNamespace>
<bodyName>livox_base</bodyName>
<ray>
<scan>
<horizontal>
<samples>100</samples>
<resolution>1</resolution>
<min_angle>${-horizontal_fov/360*M_PI}</min_angle>
<max_angle>${horizontal_fov/360*M_PI}</max_angle>
</horizontal>
<vertical>
<samples>50</samples>
<resolution>1</resolution>
<min_angle>${-vertical_fov/360*M_PI}</min_angle>
<max_angle>${vertical_fov/360*M_PI}</max_angle>
</vertical>
</scan>
<range>
<min>${laser_min_range}</min>
<max>${laser_max_range}</max>
<resolution>0.002</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>${noise_mean}</mean>
<stddev>${noise_stddev}</stddev>
</noise>
</ray>
<visualize>${visualize}</visualize>
<samples>${samples}</samples>
<downsample>1</downsample>
<csv_file_name>package://livox_laser_simulation/scan_mode/avia.csv</csv_file_name>
<publish_pointcloud_type>${publish_pointcloud_type}</publish_pointcloud_type>
<ros_topic>${ros_topic}</ros_topic>
</plugin>
</sensor>
<sensor name="livox_imu" type="imu">
<always_on>true</always_on>
<update_rate>50</update_rate>
<visualize>true</visualize>
<topic>"/livox/imu"</topic>
<plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin">
<topicName>/livox/imu</topicName>
<bodyName>imu_base_link</bodyName>
<updateRateHZ>10.0</updateRateHZ>
<xyzOffset>0 0 0</xyzOffset>
<gaussianNoise>0.0026399240948208127</gaussianNoise>
<rpyOffset>0 0 0</rpyOffset>
<frameName>imu_base_link</frameName>
<initialOrientationAsReference>false</initialOrientationAsReference>
</plugin>
<pose>0.05512, 0.02226, -0.0297 0 0 0</pose>
</sensor>
</gazebo>
</xacro:macro>
<xacro:Livox_gazebo_sensor visualize = "True" name = "livox_base" publish_pointcloud_type = "3"/>- 将雷达加入到机器人中
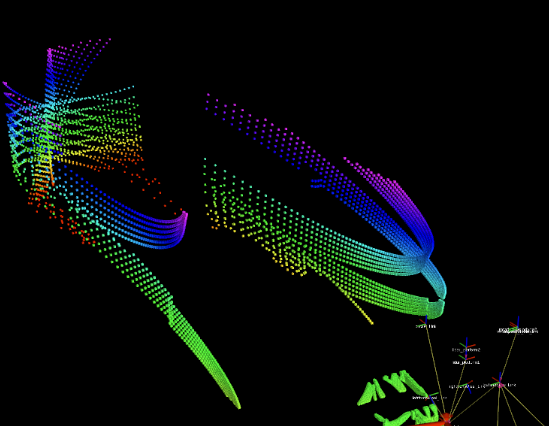
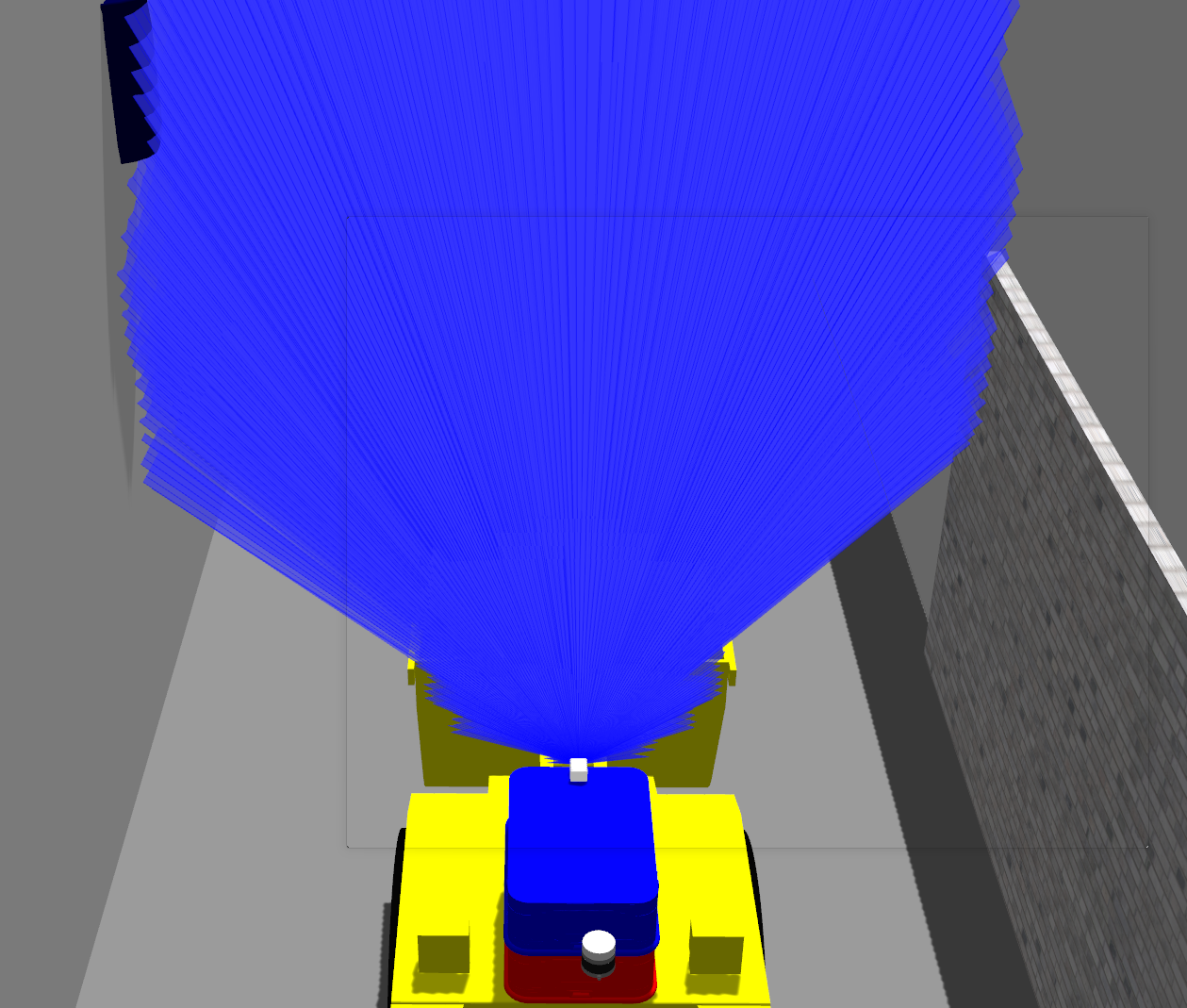
- gazebo仿真