rosserial_stm32是一个用于STM32的rosserial库,方便移植与使用。
具体教程见:在STM32里使用rosserial,这里也贴出其用法教程。
如果对你有帮助的话,请点击star⭐!
我使用的是Ubuntu 20.04 ROS Noetic搭配STM32F407开发板,不同STM32芯片之间使用起来差异不大
- Ubuntu安装软件包
sudo apt-get install ros-noetic-rosserial ros-noetic-rosserial-arduino- (已经配置好的库)MDLZCOOL/rosserial_stm32
- 新建STM32工程,配置RCC等步骤省略。
- 打开串口,配置中断和DMA,波特率推荐115200。具体配置见下图
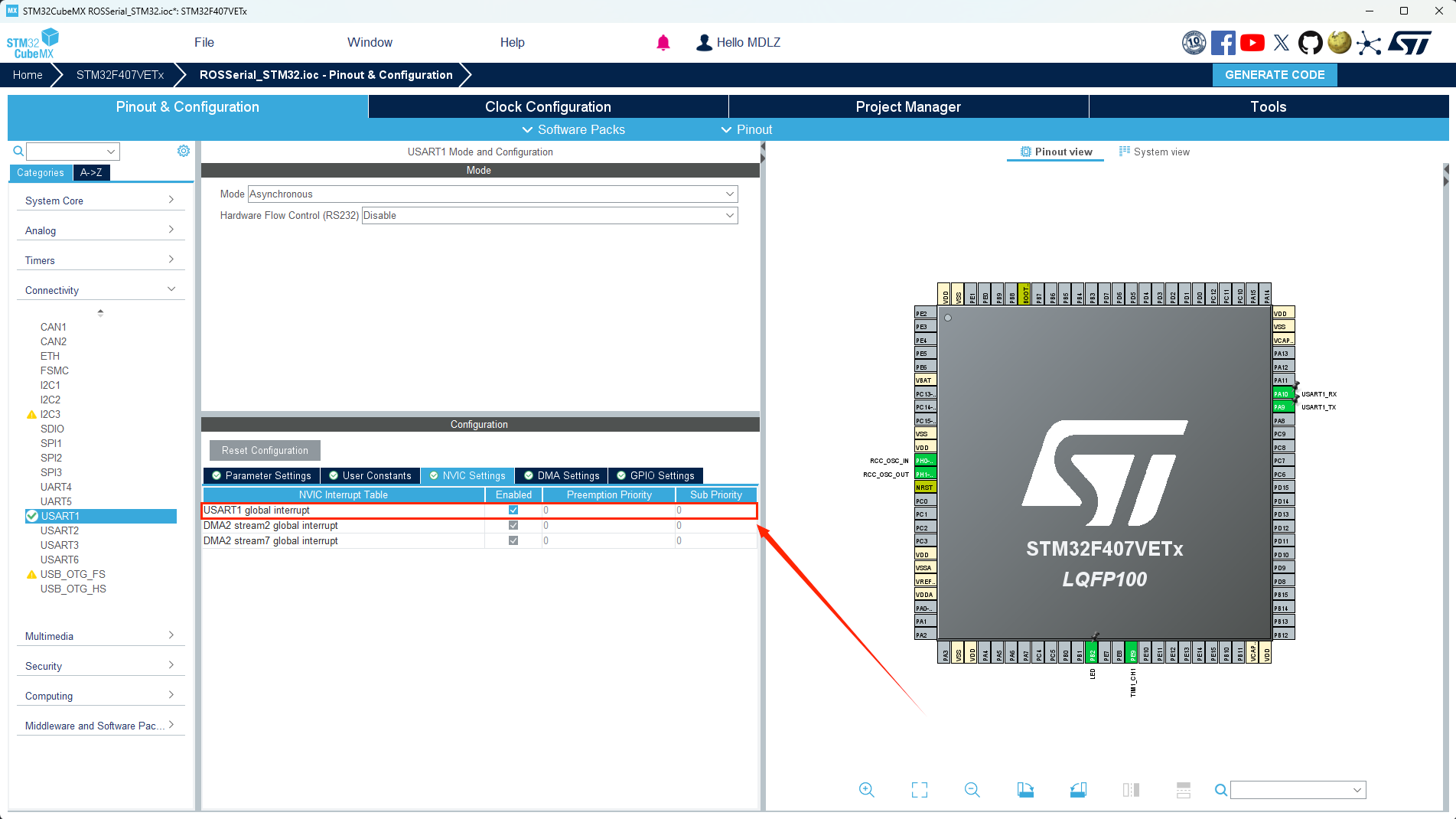
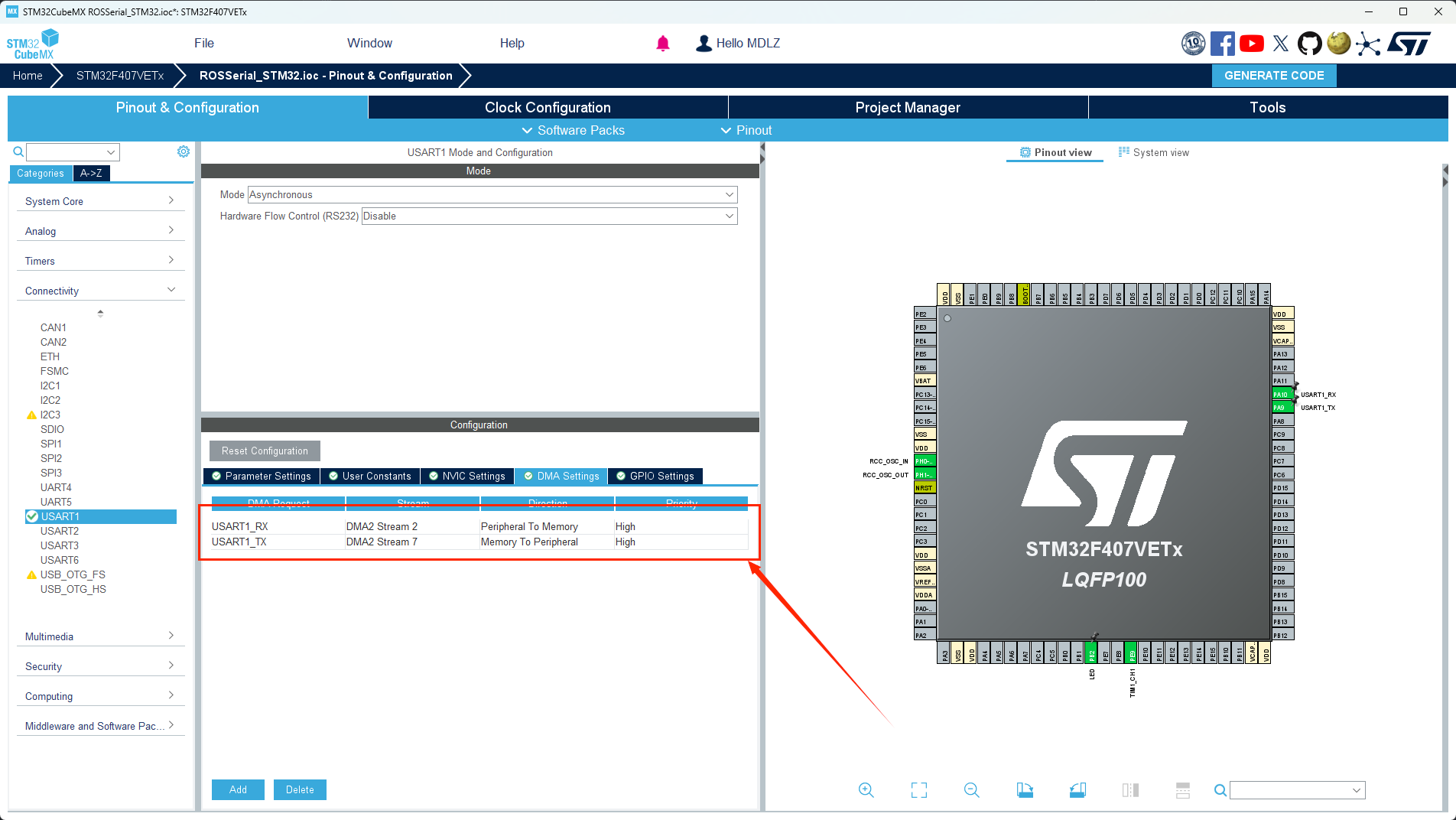
-
生成代码,将
rosserial_stm32_lib复制到Core/Inc,并添加进工程里。 -
在
Core/Src添加一个mainpp.cpp,添加以下代码
#include <ros.h>
#include <std_msgs/String.h>
#include "mainpp.h"
#include "main.h"
void messageCallback(const std_msgs::String &msg) {
// Callback
}
ros::NodeHandle nh;
ros::Subscriber<std_msgs::String> sub("/stm32_ros_bridge", &messageCallback);
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart) {
nh.getHardware()->flush();
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {
nh.getHardware()->reset_rbuf();
}
void setup(void) {
nh.initNode();
nh.subscribe(sub);
}
void loop(void) {
nh.spinOnce();
}- 在
Core/Inc添加mainpp.h,添加以下代码
#ifndef MAINPP_H_
#define MAINPP_H_
#ifdef __cplusplus
extern "C" {
#endif
void setup(void);
void loop(void);
#ifdef __cplusplus
}
#endif
#endif /* MAINPP_H_ */- 修改
main.c
int main(void){
...
/* USER CODE BEGIN 2 */
setup();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
loop();
}
/* USER CODE END 3 */
...-
修改
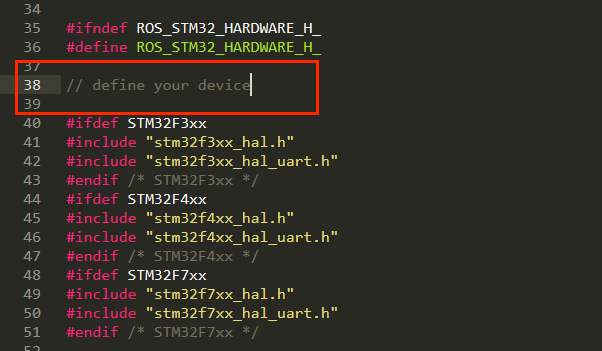
STM32Hardware.h,具体为:- 定义自己的设备头(如果预处理部分没有你的设备,请自己加上)
- 将所有的huart句柄改为你自己的,比如在
STM32Hardware.h里默认handler名字叫huart1
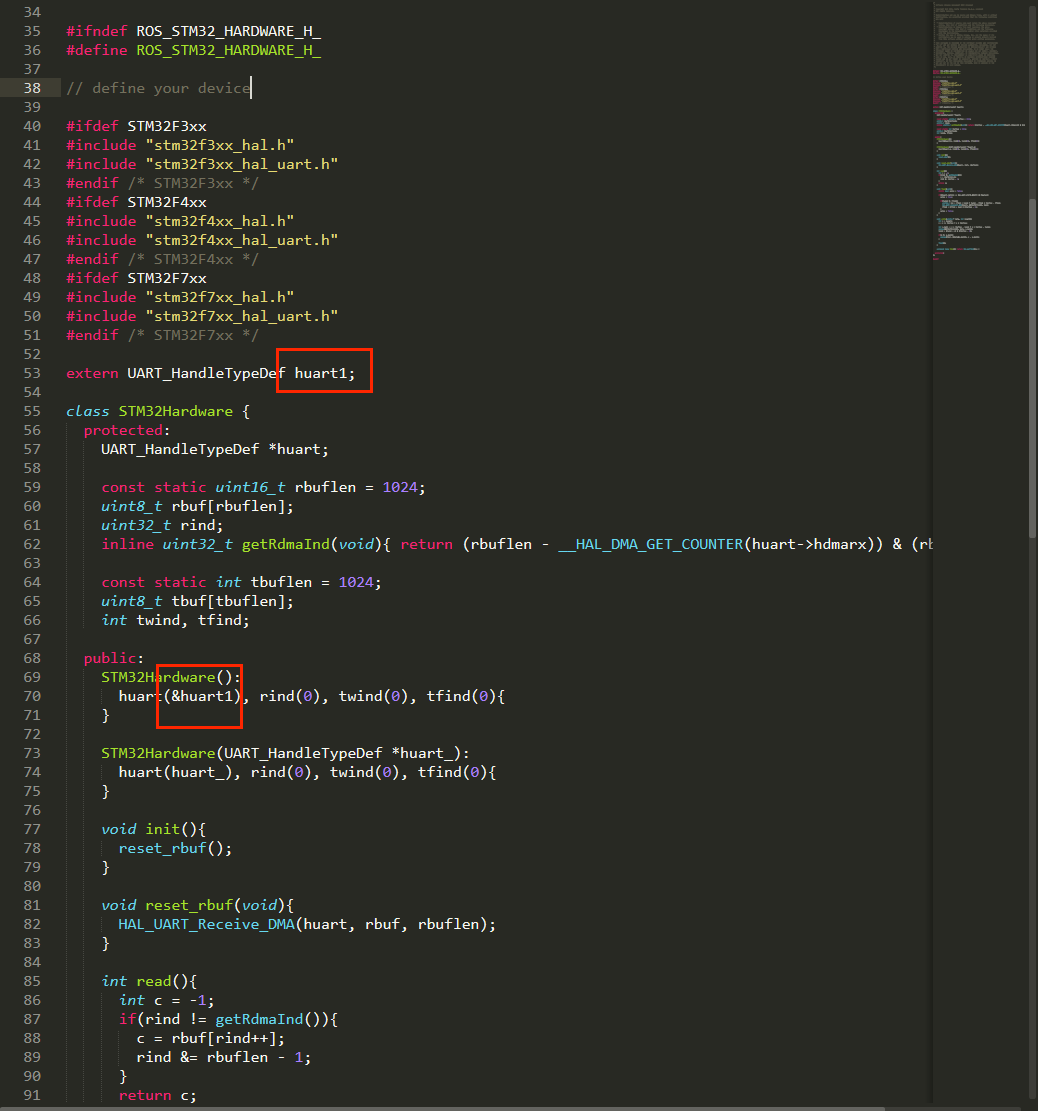
- 至此STM32就配好了
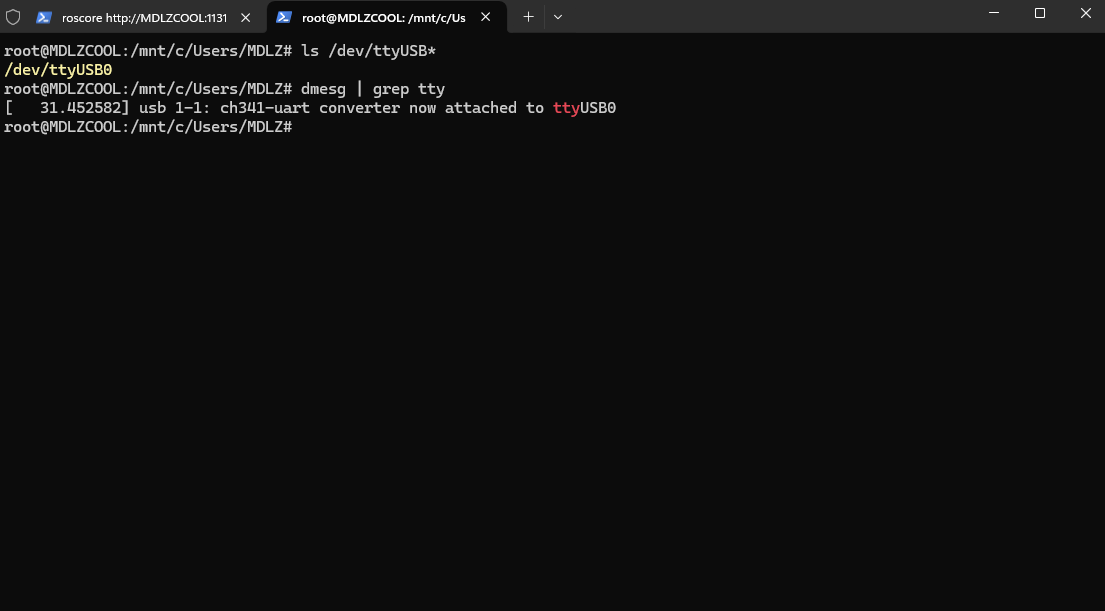
- 用串口工具连接STM32和电脑USB_HOST,使用以下命令查看USB文件位置(Linux里万物皆为文件)
ls /dev/ttyUSB*
或者
dmesg | grep tty比如这里我的USB位置就是/dev/ttyUSB0
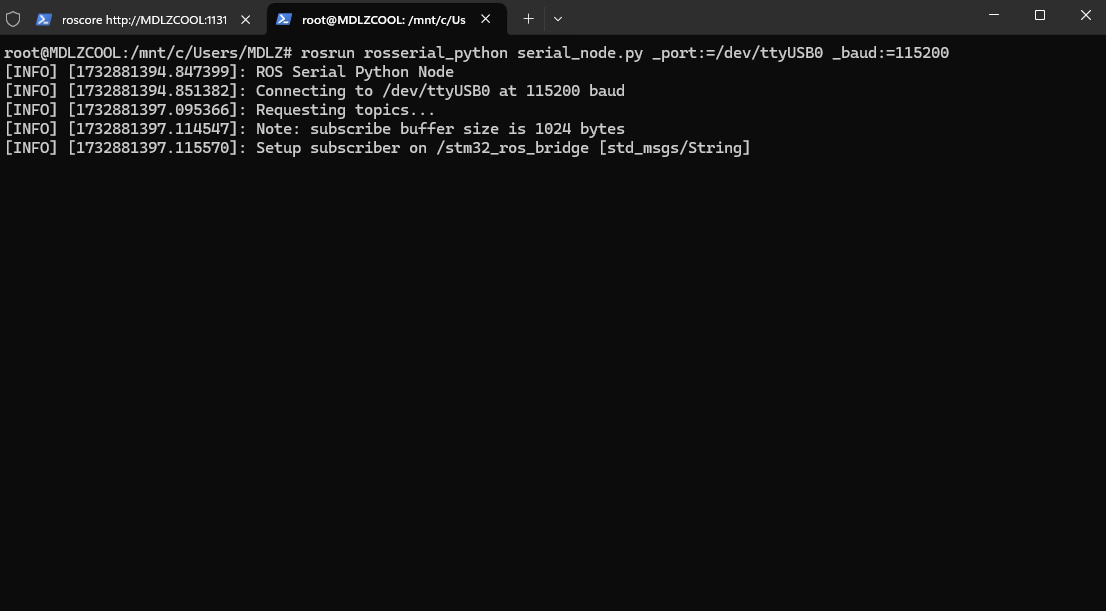
- 执行下面命令使ROS连接上STM32,别忘了先roscore
rosrun rosserial_python serial_node.py _baud:=115200 _port:=/dev/ttyUSB0不出所料的话,现在已经成功连接上设备了
- 在
mainpp.cpp实现下面测试代码:
void messageCallback(const std_msgs::String &msg) {
SEGGER_RTT_WriteString(0, "\r\nmessageCallback occurred!\r\nYour message is ");
SEGGER_RTT_WriteString(0, msg.data);
SEGGER_RTT_WriteString(0, "\r\n");
if (strcmp("servo_1", msg.data) == 0) {
SEGGER_RTT_WriteString(0, "Action 'servo_1' begin!\r\n");
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 1500);
SEGGER_RTT_WriteString(0, "Action 'servo_1' complete!\r\n");
}
}- 写入固件,连接电脑测试
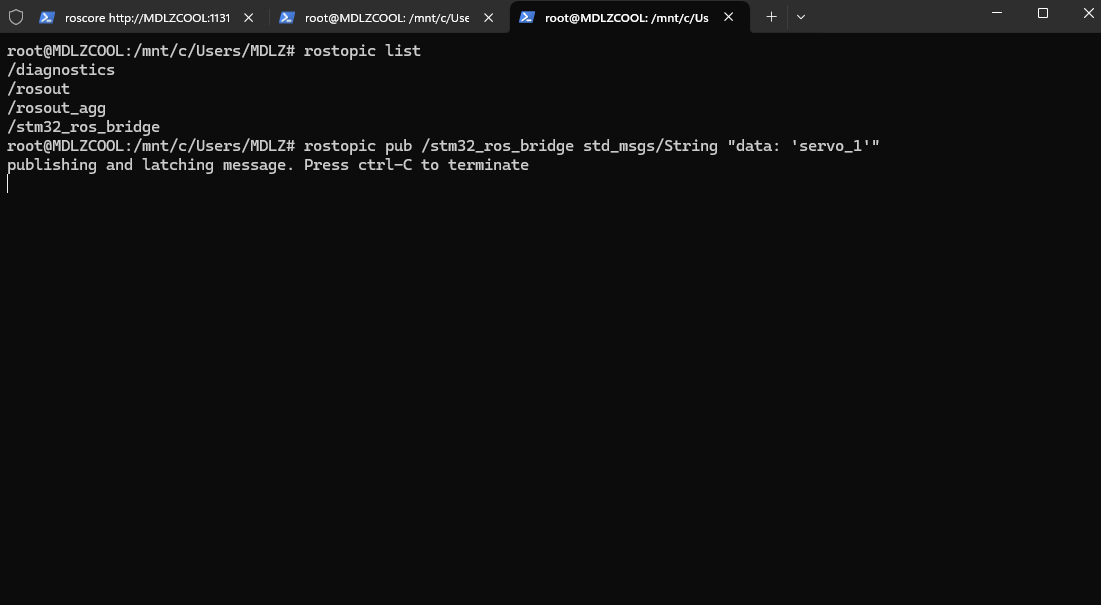

可以看到,回调函数正常触发,至此实现了ROS对STM32 publish 消息,并成功接收。
- 在
mainpp.cpp实现下面测试代码:
#include <ros.h>
#include <std_msgs/String.h>
#include "mainpp.h"
#include "main.h"
std_msgs::String str_msg;
ros::NodeHandle nh;
ros::Publisher pub("stm32_ros_bridge_pub", &str_msg);
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart) {
nh.getHardware()->flush();
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {
nh.getHardware()->reset_rbuf();
}
void setup(void) {
nh.initNode();
str_msg.data = "Hello, ROS!";
nh.advertise(pub);
}
void loop(void) {
pub.publish(&str_msg);
nh.spinOnce();
HAL_Delay(1000);
}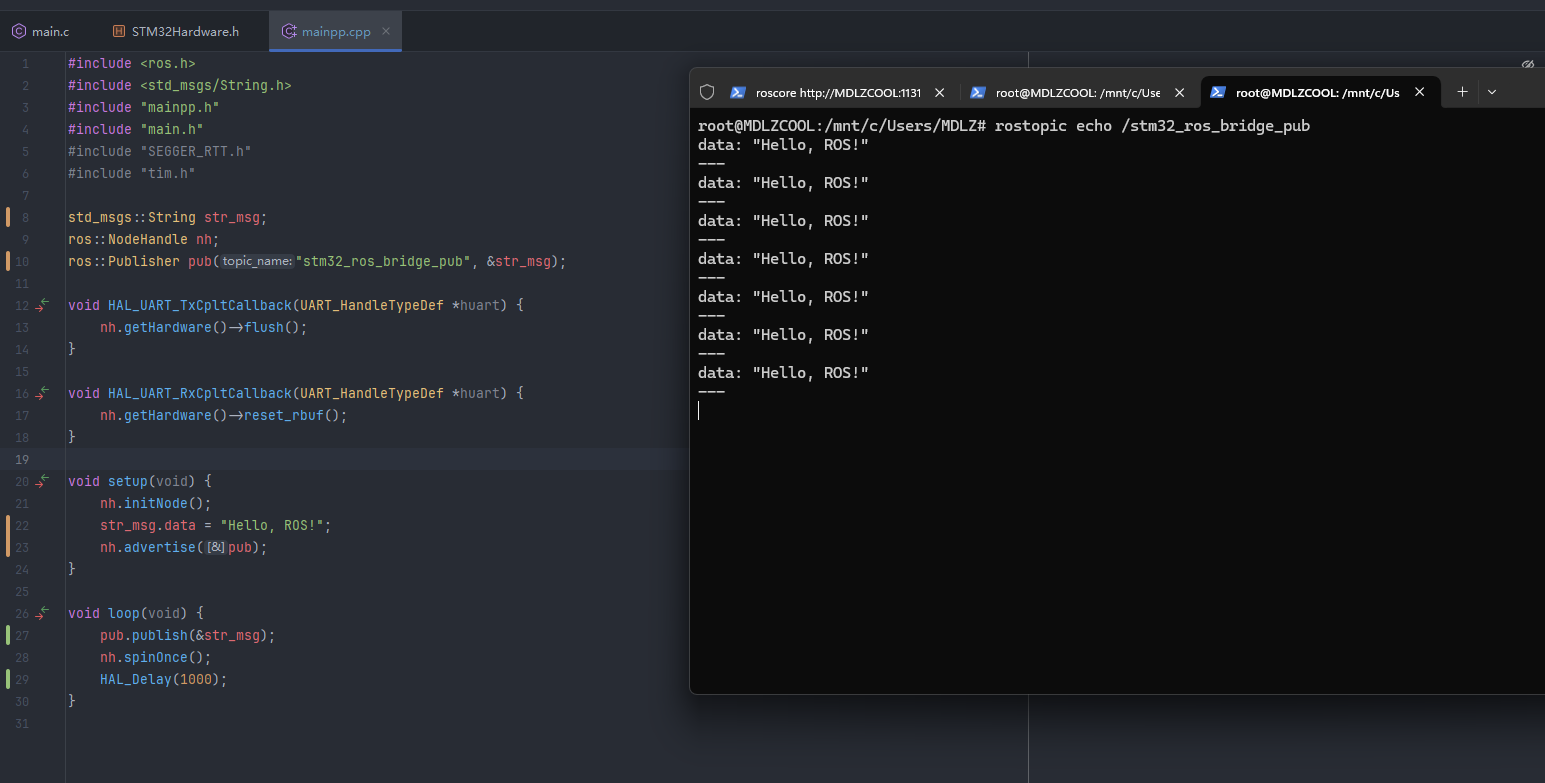
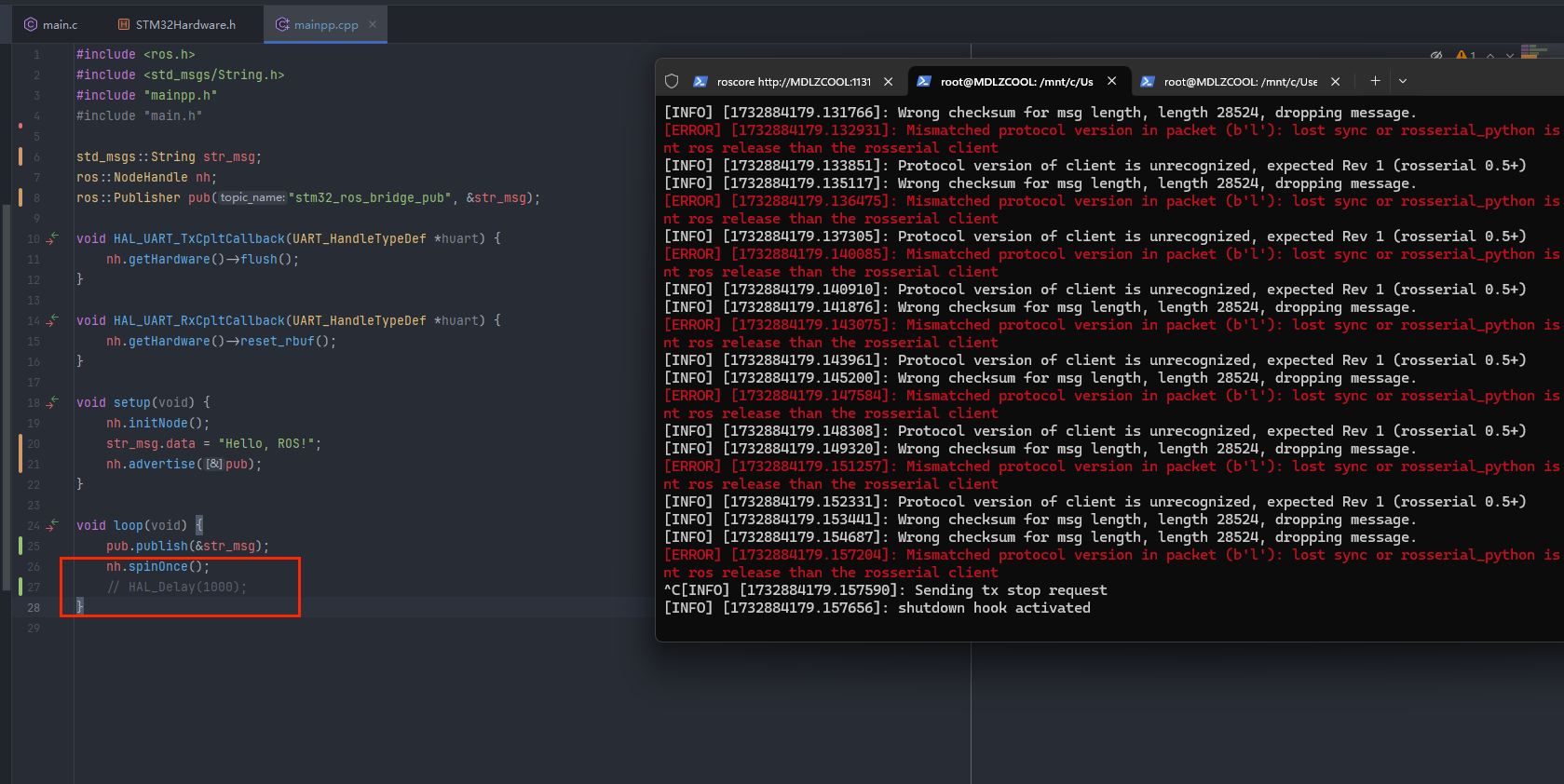
注意:这里有一个问题,我们用的波特率是115200,发送数据的频率是有限制的,如果超过这个上限,ROS拿到的数据就会丢包,没法通过完整性校验,所以这里在loop()里写了一个delay,但是这种做法不是通常推荐的,更加一般的做法是把publish写在某个定时器里,这样就不会占用CPU时间去等待。
贴一张图,发送频率不能太高
至此实现了STM32与ROS的双向通信,后面可以拿来做一些好玩的东西了。
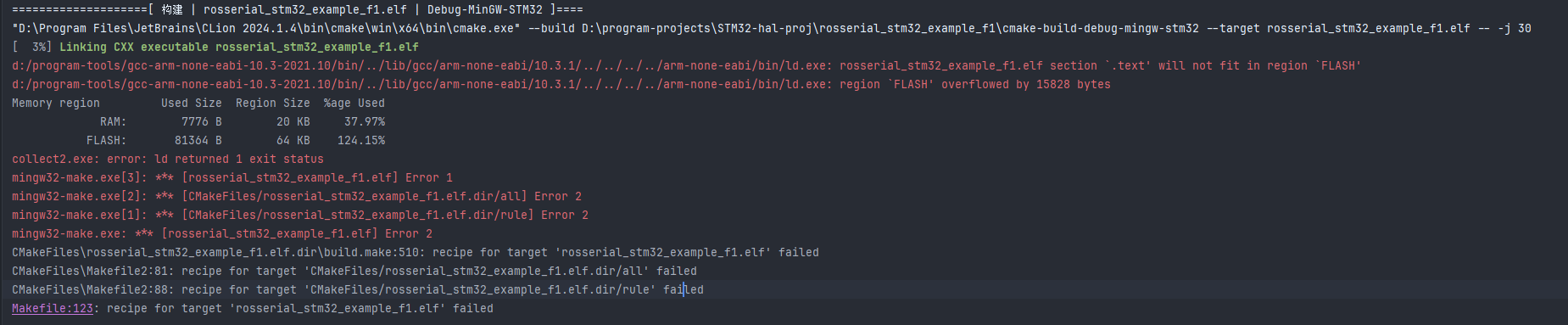
测试STM32F103C8Tx单片机,其FLASH为64K,无法装下程序,故推荐FLASH大小为80K左右。