An application for creating a route map that the robot takes over the network and then moves along a given trajectory on C# with WPF.
These instructions will get you a copy of the project, it will make it up and running on your local machine for development or usage.
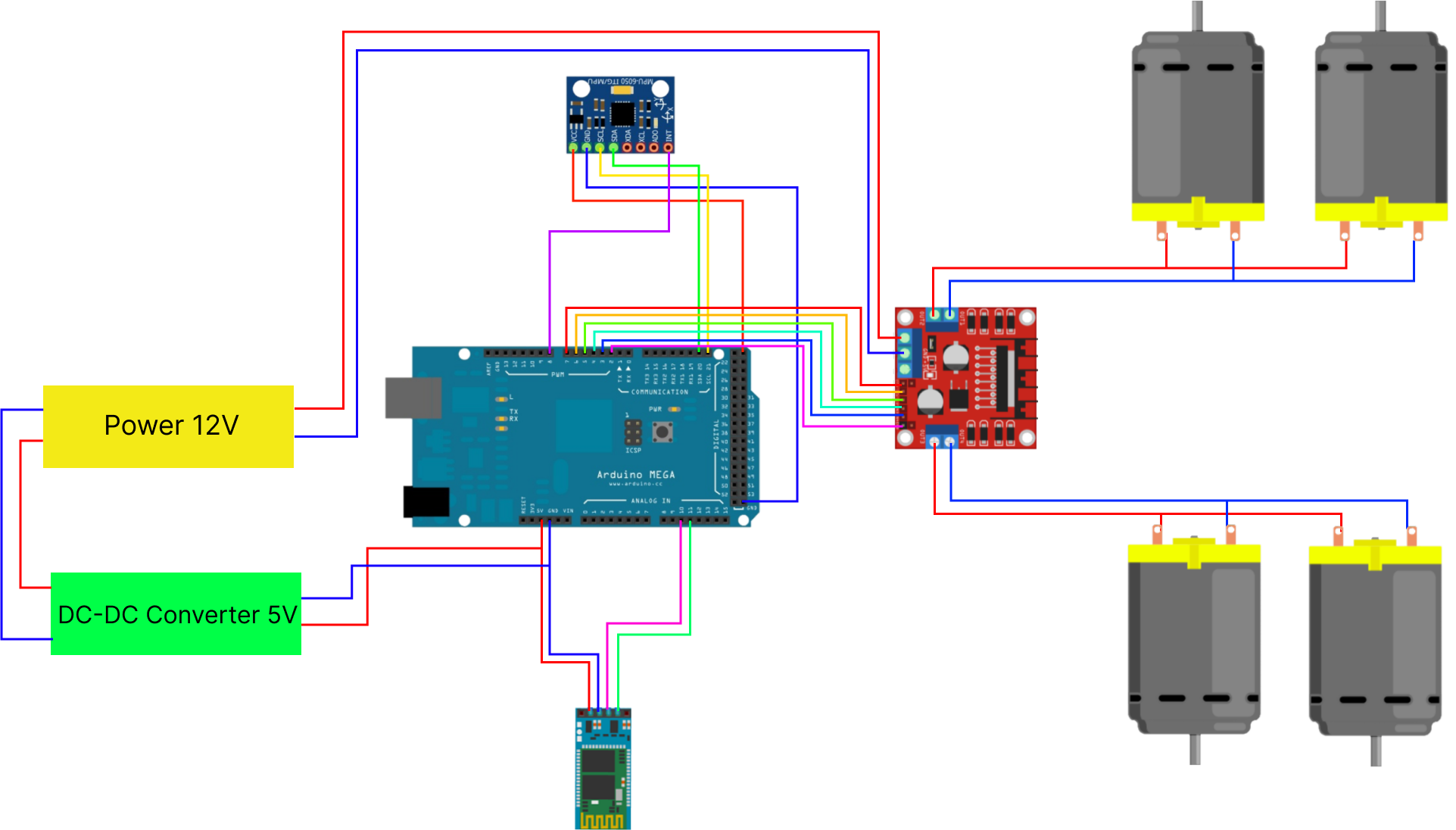
The robot contains of:
- Arduino Mega 2560 R3
- Bluetooth-module HC-06
- Accelerometer and Gyroscope Sensor MPU-6050
- DC Motor Driver Module L298N
- Gearmotors (x4)
- DC-DC Converter XL6009
- YwRobot Breadboard Power Supply MB-V2
Wiring diagram:
- Install sketch for the robot - click.
- Upload a sketch to an Arduino.
If you don't know how - read the instruction.
To download a copy of the project click here.
- Build the project.
- Right click on the "MapPainter" in the "Solution explorer" and click on "Open folder in the explorer".
- Open bin/Debug or bin/Release and run MapPainter.exe.
- Click to the connect button and start paint the route.
See also the list of contributors who participated in this project.
This project is licensed under the MIT License - see the LICENSE file for details.