


The Spartabots' FRC robot code for our main outreach bot.
The drive train is controlled by four Victors.
The arm is controlled by controlled by four CANTalons.
The roller is controlled by one Victor.
Since this is an outreach bot, our "joystick" is a dancepad that looks like this:
| sel | sta |
| × | ↑ | O |
| ← | | → |
| Δ | ↓ | □ |
The cross (×) rolls the ball in.
The triangle (Δ) rolls the ball out.
The circle (O) raises the arm (shoots the ball).
The square (□) lowers the arm.
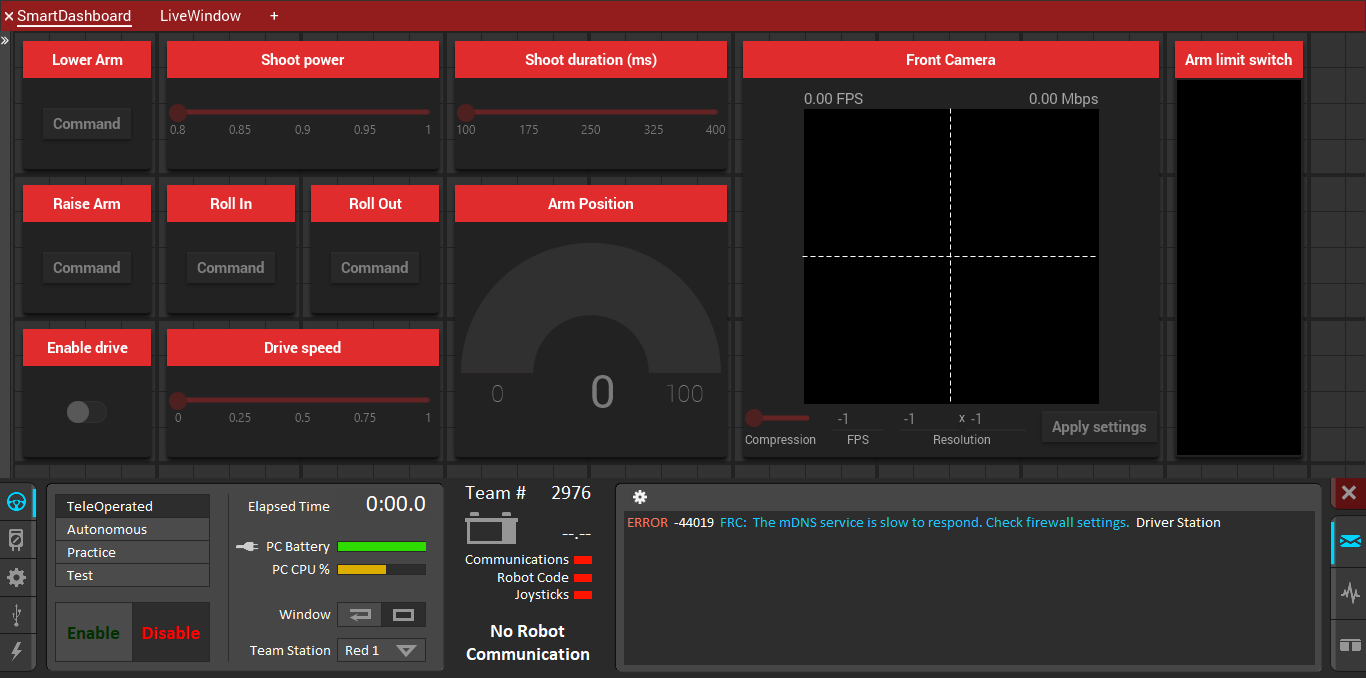
We use ShuffleBoard for our dashboard. It has buttons and sliders for enabling and adjusting drive and shooter speed.
- Install the NI Update Suite and the WPILib Development Tools (+VS Code) (Instructions)
- Install the libraries we use (CTRE Phoenix and NavX).
- Make a new WPILib Java project and clone this repository
We use only one 3rd party library:
- CTRE Phoenix (Currently using v5.12.0)
- Commit your changes to a feature branch, not to master, especially if it is untested
- Write good commit messages
- Written in sentence case (only first word capitalized)
- Should complete the sentence: "If applied, this commit will [Your commit message]."
- Make sure each of your methods has a Javadoc comment and you comment liberally
- Maintain a consistent code style
This bot has been retired as of 8/24/2019 due to weakness of motors, gearboxes, structural integrity, and electronics after years of use. A new version of the "Yoga Ball Bot" should hopefully be made soon. This repository is still a valuable resource for learning the FRC control system. A version of this program will also be made using the "new control system" to serve as an example.
Thank you Yoga Ball Bot for your years of service and may your soul rest in pieces.