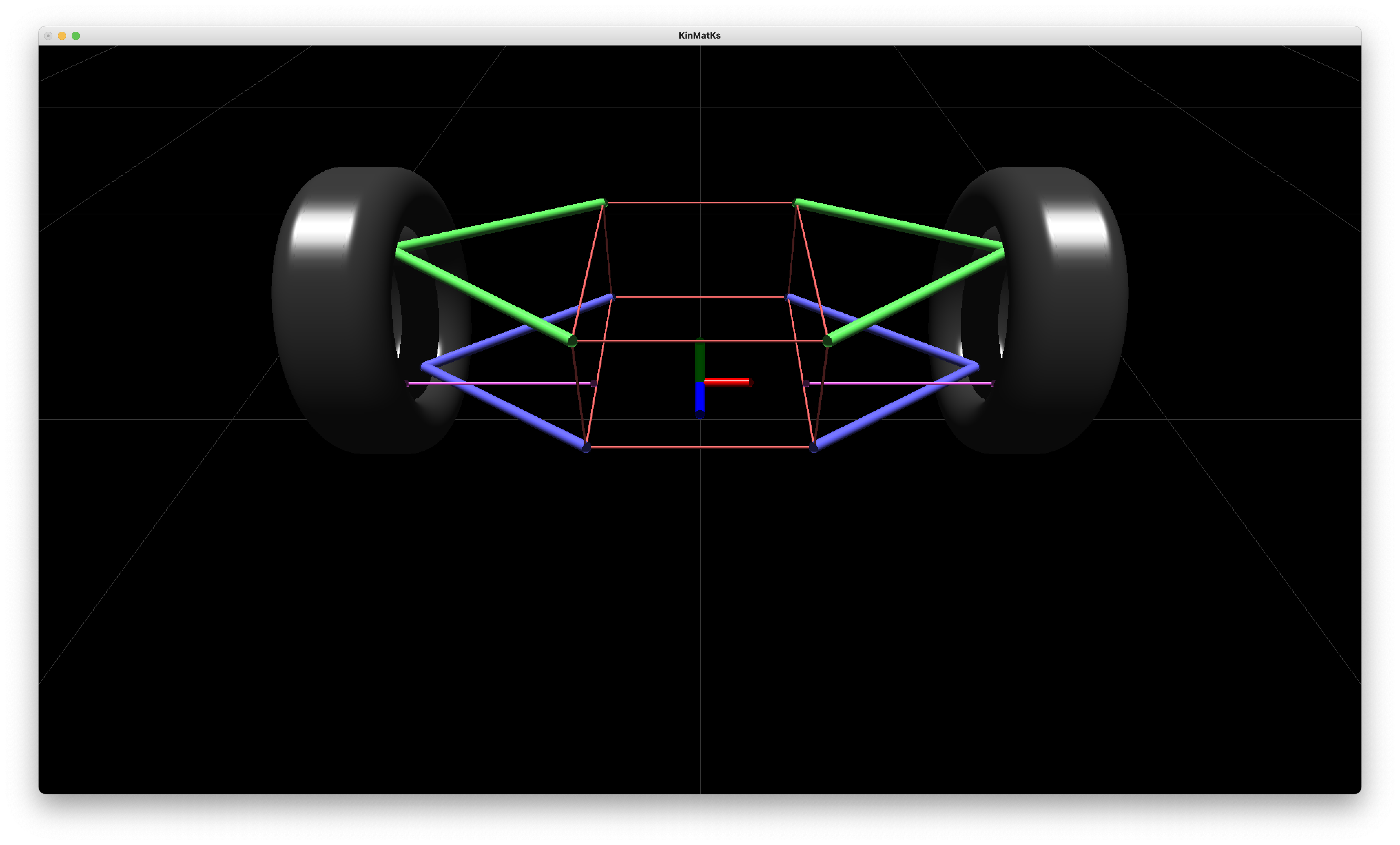
KinMatKs is my attempt at making a vehicle dynamics Kinematics Simulation program.
Current functionality includes:
-
Squat - Press S to make the vehicle squat (not currently working, math is hard)
-
Bump - Press B to make the vehicle bump (just barely working)
-
Fully* adjustable suspension points, inboard and outboard (Fully meaning it follows traditional double wishbone suspension design)
-
Move around the model. This one I'm really proud of, cause quaternions kinda suck.
-
Does 'quit' count? - Press Q to quit the program
-
Perspective - Very gimmicky, press P to cause a change in perspective. Doesn't look better, but it's another button to press.
-
Lighting - Press L to toggle lighting. Defaults to 'on' since that looks better IMO, but can be turned off if it works for you
-
Fix Squat functionality
-
Add second half to vehicle (what good is only two wheels?)
-
Add gravity (kinda useless without the ever-constant force that all cars experience)
-
Add center of mass (kinda necessary for gravity to work correctly)
-
Add in program parameter changing
-
Add parameter saving
-
Add data replay (Bad idea, many headaches, wicked cool)