{kind=link}
{kind=link}
Exemplary code Autonomous Robotics Lab
@ Celi Sun @ Nov, 2017 @ Brandeis University
This is a practice to write multiple nodes communicating using the three major ROS functions: topic, action and service, to complete a simple task of asking-turtlebot-to-spin. The three nodes nlp_server, console_reader and motor_action_server are collaborating via the main, by reading the human user's inputs on condole, prcessing the reading and manipulating the turtlebot (to do the spinning to a certain degree) accordinly.
Nodes:
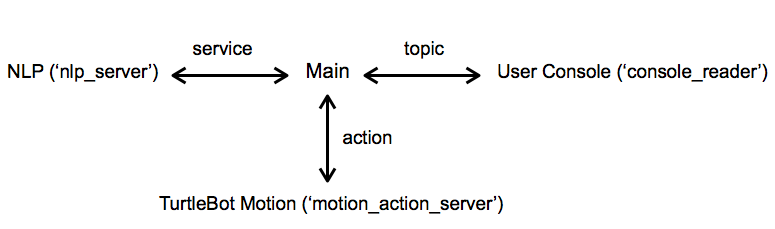
- main: the main coordinator, listens to console reader for user input, can invoke NLP service for input processing, and can send goals to action server for turtlebot mission
- console_reader: read inputs from the user and publish through message to the Main node
- nlp_server: a simple NLP service node to take a string as input when invoked by the Main, e.g. "turn 361" and return an float e.g. "-1"
- motor_action_server: publish action mission to turtlebot about motor action to take, e.g. spin -90 degrees, and print out the feedback during the mission, such as the time consumed and angles left
The strcuture of communication between nodes can be described as below:
- ros kinetics
- python
You can clone this repository from git to your own workspace by:
$ cd ~/catkin_ws/src
$ git clone https://github.com/campusrover/CourseExemplary_RosConsoleController.git
Go back to catkin_ws and build the packages in the workspace by running catkin_make command:
$ cd ..
$ catkin_make
Now you can run the solution by launch file:
$ roslaunch CourseExemplary_RosConsoleController bringup.launch
If launched successfully, you will see the line "What do you want the robot to do?",
now type in command to activate the console reader. For example:
What do you want the robot to do?
$ turn 90
Now just sit tight and watch the turtlebot while getting feedbacks during the action!