

Arduino library for U8 series laser distance sensor. U8 series is an accurate LIDAR (ligth detection and ranging) sensor module with +/- 1 mm accuracy from JRT Meter Technology. This library support for U81x and other laser sensor module from JRT using U(S)ART interface.
- Choose
Sketch->Include Library->Manage Libraries... - Type
U8xLaserinto the search box. - Search a row with title
U8xLaserDistance. - Click the
Installbutton to install the library.
Open terminal, Git bash, or command prompt in Arduino library folder then run following command. Default library folder for windows is C:\Users\{username}\Documents\Arduino and for linux is ~/Documents/Arduino/libraries/.
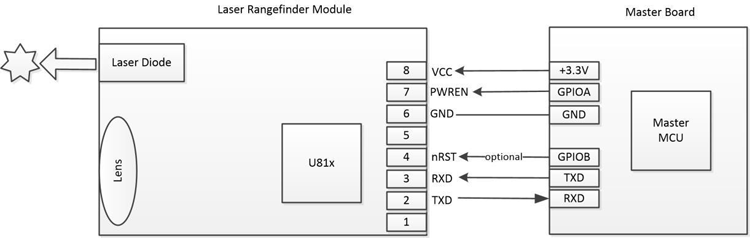
git clone https://github.com/chandrawi/U8x_Laser_Distance.gitTo work with U8x LIDAR sensor, you must connect Arduino UART pins and PWREN pin to the sensor like picture below.
To work with the library, first you must include U8xLaser.h. Then initialize class by creating an object with a HardwareSerial instance and a PWREN pin and optionally a RESET pin.
#define PWREN_PIN PA15
HardwareSerial SerialU8x(PB7, PB6);
U8xLaser U8x(SerialU8x, PWREN_PIN);Alternatively a default Serial object will be used if a HardwareSerial instance not supplied.
#define PWREN_PIN PA15
U8xLaser U8x(PWREN_PIN);Read current laser module status is done by calling status method.
uint16_t status = U8x.status();The return value of the method has meaning like described in the table below.
| Status Code | Description |
|---|---|
| U8X_STAT_NO_ERR | No error |
| U8X_STAT_VLTG_LOW | Power input too low, power voltage shoul >= 2.2 V |
| U8X_STAT_INT_ERR | Internal error, don't care |
| U8X_STAT_TEMP_LOW | Module temperature is too low (< -20 °C) |
| U8X_STAT_TEMP_HIGH | Module temperature is too high (> +40 °C) |
| U8X_STAT_OUT_RANGE | Target out range |
| U8X_STAT_INV_RESULT | Invalid measure result |
| U8X_STAT_BG_LIGHT | Background light too strong |
| U8X_STAT_LASER_WEAK | Laser signal too weak |
| U8X_STAT_LASER_STRONG | Laser signal too strong |
| U8X_STAT_HW_FAULT_1 | Hardware fault 1 |
| U8X_STAT_HW_FAULT_2 | Hardware fault 2 |
| U8X_STAT_HW_FAULT_3 | Hardware fault 3 |
| U8X_STAT_HW_FAULT_4 | Hardware fault 4 |
| U8X_STAT_HW_FAULT_5 | Hardware fault 5 |
| U8X_STAT_LASER_UNSTABLE | Laser signal not stable |
| U8X_STAT_HW_FAULT_6 | Hardware fault 6 |
| U8X_STAT_HW_FAULT_7 | Hardware fault 7 |
| U8X_STAT_INV_FRAME | Invalid frame |
Get information about laser module hardware version, software version and serial number is done by calling corresponding method.
uint16_t hwVer = U8x.hardwareVersion();
uint16_t swVer = U8x.softwareVersion();
uint32_t serNum = U8x.serialNumber();Laser can be turn on and off using following code.
U8x.laserOn();
U8x.laserOff();Single shot measurement is done by calling measureSingle, measureSingleSlow, or measureSingleFast method for auto, slow (accurate), or fast measuring mode respectively. Those methods will block the program and return measurement result.
void loop() {
int32_t distance;
// Single shot auto measurement
distance = U8x.measureSingle();
// Single shot slow (accurate) measurement
distance = U8x.measureSingleSlow();
// Single shot fast measurement
distance = U8x.measureSingleFast();
}Continuous measurement is started by calling startMeasure, startMeasureSlow, or startMeasureFast method for auto, slow (accurate), or fast measuring mode respectively. measureResult method must be called to get measurement result after continuous measurement started. For example:
void setup() {
// Start continuous slow (accurate) measurement
U8x.startMeasureSlow();
}
void loop() {
// Get measurement result
int32_t distance = U8x.measureResult();
}When no longer needed, continuous mode can be terminated using stopMeasure method. For example, to get average of some measurement see code below.
void loop() {
// Start continuous slow (accurate) measurement
U8x.startMeasureFast();
// Get average of 4 measurement results
int32_t sum = 0;
for (int8_t i=0; i<4; i++) {
sum += U8x.measureResult();
}
int32_t distance = (sum + 2) / 4;
// Stop continuous measurement
U8x.stopMeasure();
delay(5000);
}After any measurement is done, the laser signal quality of the last measurement can retrieved by calling getSignalQuality method.
uint16_t sigQual = U8x.getSignalQuality();This library provide sleep method to put laser module in power down mode and wake method to wake the module. During power down mode, power consumed is very low. You can see low power implementation in this example.
See examples here