

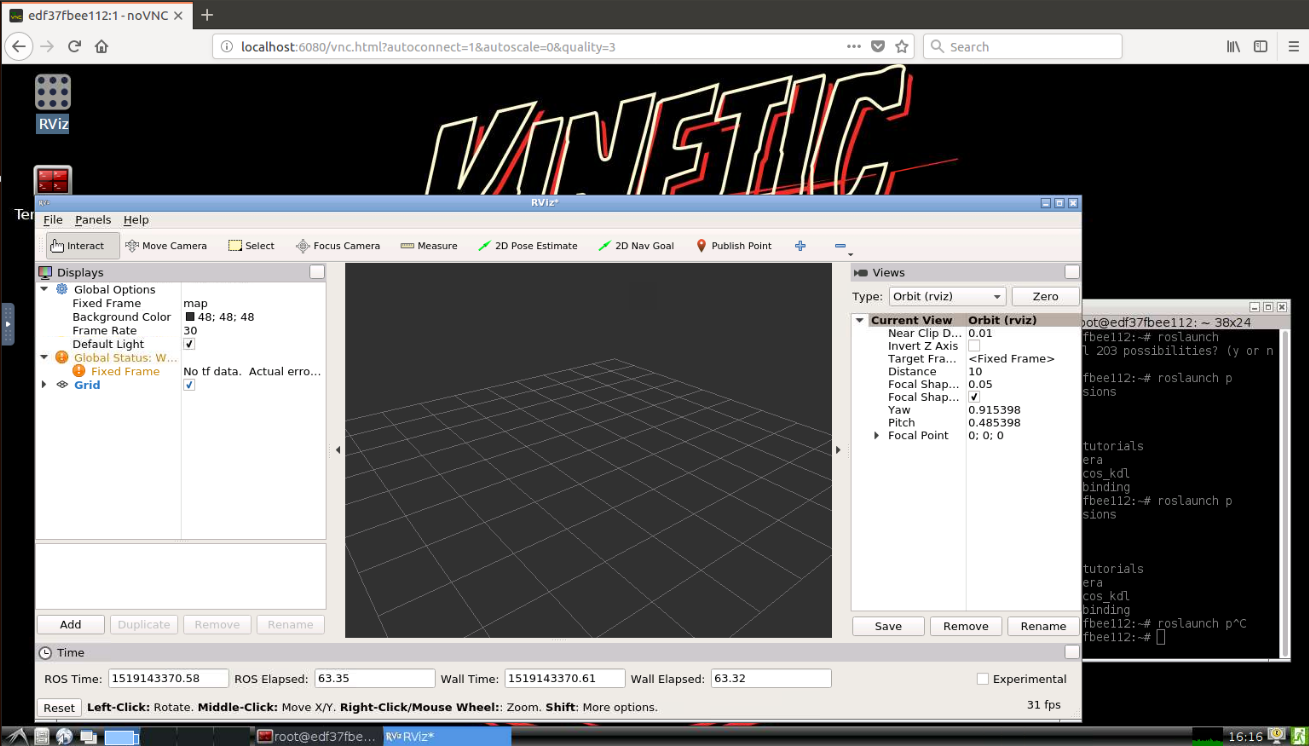
Docker image to provide HTML5 VNC interface to access ROS kinetic on Ubuntu 16.04 with the LXDE desktop environment.
Run the docker image and open port 6080
docker run -it --rm -p 6080:80 ct2034/vnc-ros-kinetic-full
Browse http://127.0.0.1:6080/
Forward VNC service port 5900 to host by
docker run -it --rm -p 6080:80 -p 5900:5900 ct2034/vnc-ros-kinetic-full
Now, open the vnc viewer and connect to port 5900. If you would like to protect vnc service by password, set environment variable VNC_PASSWORD, for example
docker run -it --rm -p 6080:80 -p 5900:5900 -e VNC_PASSWORD=mypassword ct2034/vnc-ros-kinetic-full
A prompt will ask password either in the browser or vnc viewer.
Mount host directory to docker using
docker run -v <your directory>:/mnt/ -it --rm -p 6080:80 ct2034/vnc-ros-kinetic-full
- boot2docker connection issue, fcwu#2
- Screen resolution is fitted to browser's window size when first connecting to the desktop. If you would like to change resolution, you have to re-create the container
See the LICENSE file for details.