This project implements a robot that follows objects using a camera. The robot is controlled using ROS (Robot Operating System) and Gazebo simulator.
- ROS (Kinetic, Melodic, or Noetic)
- Gazebo
- OpenCV
- Python 3
git clone https://github.com/emirhancibir/object_follower_bot.git
cd object_follower_bot
catkin_make
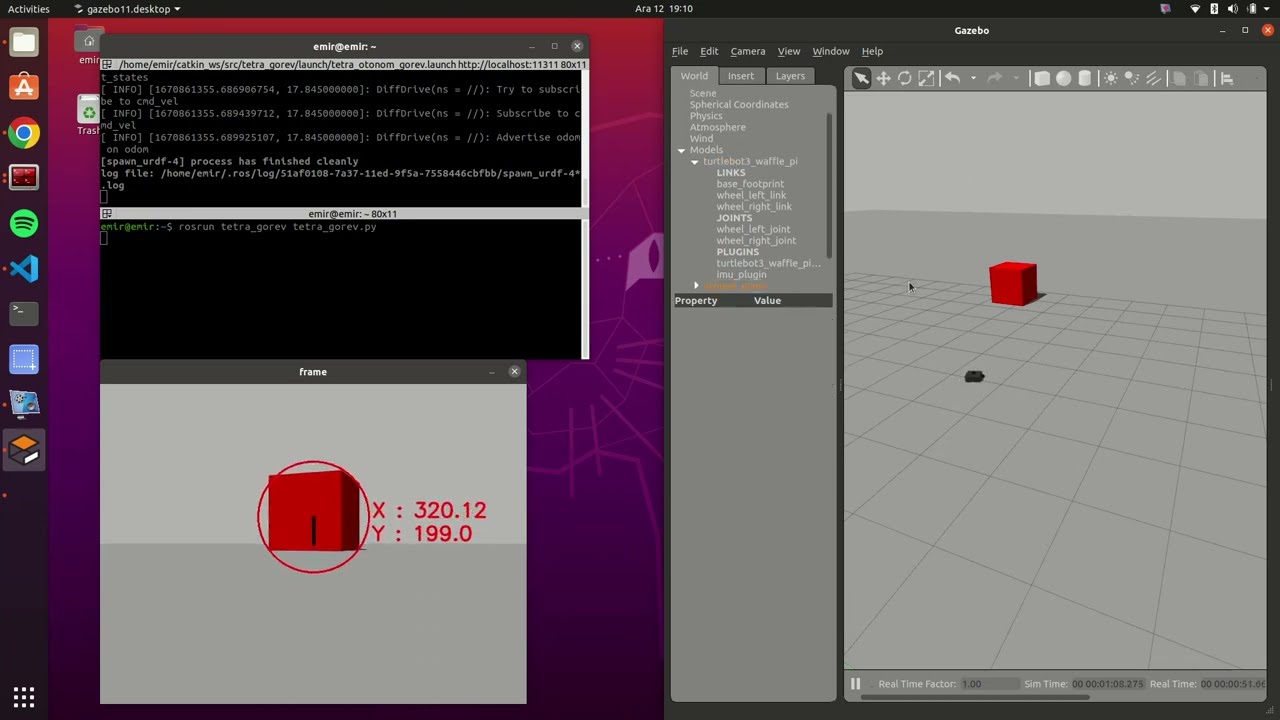
roslaunch object_follower_bot gazebo.launch
rosrun object_follower_bot follow_bot.py
The follow_bot.py script subscribes to the RGB camera topic to detect objects. It calculates the error between the center of the detected object and the center of the camera frame. Based on this error, it controls the robot's movement to follow the object.
- Subscribes to:
/camera/rgb/image_raw - Publishes to:
/cmd_vel
Launches Gazebo simulator with a world containing the robot model.
Contributions are welcome! Please fork the repository and create a pull request.