![]()
A sleek, intuitive interface for building Simulink models from a Matlab script.
Explore Matsim docs »
Report bug
·
Request feature
Matsim is a high level interface to create Simulink models from a Matlab script. Matsim is a wrapper around the standard simulink API that makes building a simulink model programmatically much faster.

- Automatic layout (no need to specify block positions!)
- Intuitive interface (you can "add", "subtract", "multiply", ... simulink blocks)
- Extensible library (easily add new blocks from your custom libraries)
| Source script (.m) | Resulting model | Notes |
|---|---|---|
c = Constant(1) |
 |
Create a Constant block with value 1 |
res = a+b |
 |
Create an Add block and connect its inputs to blocks a and b |
res = [a,b] |
 |
Create an Mux block and connect its inputs to blocks a and b |
res = Max(a,b) |
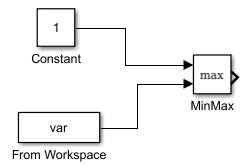 |
Create an MinMax block and connect its inputs to blocks a and b |
res = 1 - u1./(u2.*u3) |
 |
Create a group of simulink blocks that computes a complex expression |
Scope(Gain(FromWorkspace('var'),'Gain',0.5)) |
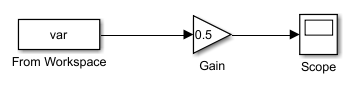 |
Easily combine blocks |
The automatic layout feature relies on GraphViz, which you need to install separately.
- Install GraphViz and add it to the system PATH
- Download and extract the Matsim package (from File Exhange or from here)
- Add Matsim folder (and subfolders) to the Matlab path
Quick example to get started. For more check the tests folder.
import matsim.library.* % Import Matsim package
sys = simulation.load('my_model'); % Create or load a model named 'my_model'
sys.setSolver('Ts',0.01,'DiscreteOnly',true) % Set solver for the model
sys.clear() % Delete all blocks
sys.show() % Show the modelVx = FromWorkspace('V_x'); % Add FromWorkspace and Constant blocks
Wr = FromWorkspace('W_r');
Rr = Constant(0.32);
slip = 1 - Vx./(Wr.*Rr); % Evaluate complex mathematical expression
sys.log(slip,'name','slip') % Log the output of the "slip" block
s = Scope(slip); % Create and open scope block
s.open()sys.layout() % Connect and layout the modelV_x = [0:0.1:10;linspace(5,20,101)]'; % Define input variables
W_r = [0:0.1:10;linspace(5,23,101)/0.32]';
simOut = sys.run('StopTime',10).Logs; % Simulate the system© Copyright 2017 - 2019 by Marco Gavelli