This repository contains the open-sourced ROS package that implements the contributions from the paper "HGP-RL: Distributed Hierarchical Gaussian Processes for Wi-Fi-based Relative Localization in Multi-Robot Systems."
It uses Gaussian process regression with hierarchical inferencing for access point position prediction and vector transformation for relative localization.
This package contains Robotarium-Python codes (for simplified simulations) as well as the ROS package (for real-world robot implementations), which has 3 ROS nodes:
- Access Point Prediction Node.
- Position Prediction Node.
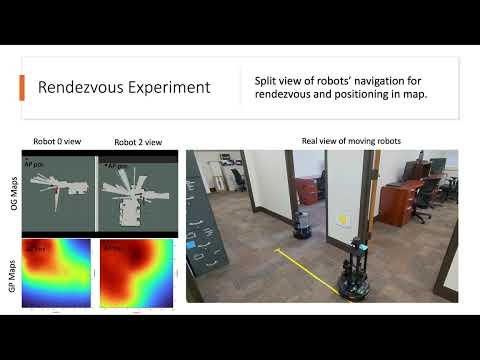
- Rendezvous Node
If you find this repository useful, please consider citing our paper: Latif, E., & Parasuraman, R. (2024). HGP-RL: Distributed Hierarchical Gaussian Processes for Wi-Fi-based Relative Localization in Multi-Robot Systems. arXiv preprint arXiv:2307.10614. Preprint is available in arXiv (https://arxiv.org/pdf/2307.10614)
Update: The paper is accepted for presentation at IROS 2024 (Oct 14-18, 2024. Abu Dhabi)
The system first trains the GP for a few iterations and then optimizes GP during the robot's navigation. The robot running the GP predicts the access point position and then shares it with other robots for relative localization. An overview of the proposed approach can be found in the Figure below:

The overall functionality of GPRL with respect to single robot and information sharing can be seen in the architecture figure below:

- C++ requirements.
(pybind11 is also required, but it's built into this repository; you don't need to install) - python 3.6+
- Robotarium Installation is required for the Robotarium simulation
- Robots setup with mapping and navigation stack proper TF-Tree with the multi-robotic configuration; topics should be /tb2_0/odom, /tb2_1/odom, etc.
Download the package and place it inside the /src folder in the Catkin workspace. And then compile using catkin_make.
Run the robotarium script for GPRL as:
python3 gprl_robotarium.py
Run the GPRL package after installation on a robot and source bash and ~/catkin_explore/devel/setup.sh file:
$ mkdir -p catkin_explore/src
$ cd catkin_explore/src
$ git clone https://github.com/herolab-uga/gp-multi-robot-localization.git
$ cd ~/catkin_explore/
$ catkin_make
Setup bring-up of robots and make sure they are publishing all the topics in the correct frames, the launch gp-loc file is as:
roslaunch gprl gprl.launch robot_name:=<tb2_0> robot_number:=<0>
robot_name can be your robots name and robot_number starts from 0 to n.
For the cooperative robotic configuration, the package doesn't require special network configuration; it simply works by having a single ROS master (it can be one of the robots). So on the other robots, the ROS_MASTER_URI parameter should be pointing at the master's address.
For more information on setting up ROS on multiple machines, follow this link.
All robot frames should be prefixed by their name. The naming of robots starts from "/tb2_0", "/tb2_1", ... and so on.
All the nodes and topics running on a robot must also be prefixed by its name. For tb2_0, node names should look like: /tb2_2/ap_pos.
And topic names should be like: /tb2_0/odom, /tb2_0/ap_pos, /tb2_0/tb2_1_rel_pos, ..etc.
To perform rendezvous, run the rendezvous node as:
ROS_NAMESPACE=<tb2_0> rosrun gprl rendezvous.py _robot_name:=<tb2_0> _robot_count:=<n> _robot_number:=<0>
Set all the parameters and namespace accordingly.
-
Ehsan Latif - PhD
-
Dr. Ramviyas Parasuraman - Lab Director
Heterogeneous Robotics Lab (HeRoLab), School of Computing, University of Georgia.
For further information, contact Ehsan Latif ehsan.latif@uga.edu or Dr. Ramviyas Parasuraman ramviyas@uga.edu
