Implementation of Dai and al. paper (Learning combinatorial optimization algorithms over graph) in Python and torch
Source of the Dai and al. paper:
@article{dai2017learning,
title={Learning Combinatorial Optimization Algorithms over Graphs},
author={Dai, Hanjun and Khalil, Elias B and Zhang, Yuyu and Dilkina, Bistra and Song, Le},
journal={arXiv preprint arXiv:1704.01665 https://arxiv.org/abs/1704.01665},
year={2017}
}
The goal of this study is to implement the work done by Dai and al. who developed a unified framework to solve combinatorial optimization problem over graph through learning. The model is trained on batch of graphs from a Erdös-Rényi and a Barabási–Albert degree distribution, with a fix number of node. Firstly, the algorithm learns the structure of the graph through a graph embedding algorithm. A helping function provides as an input the current state of progress of the optimisation. Then it chooses the best node to add to the optimal set through a reinforcement learning algorithm. I have worked on two combinatorial optimization problems, Minimum Vertex Cover (MVC) and Maximum Cut Set (MAXCUT).
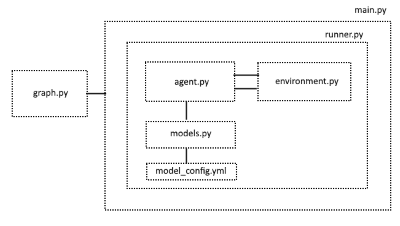
main.py allows to define arguments and launch the code.
Arguments :
-
--environment_name, type=str, default='MVC' : environment_name is the kind of optimization problem. It must beMVCfor Minimum Vertex Cover problem orMAXCUTfor Maximum Cut Set problem. -
--agent, type=str, default='Agent' : Define the name of the agent. -
--graph_type, type=str, default='erdos_renyi' : define the kind of degree distribution of graphs. It must be amongerdos_renyi,powerlaw,barabasi_albertorgnp_random_graph. -
--graph_nbr, type=int, default='1000', : number of different graph to generate in training sample. -
--model, type=str, default='GCN_QN_1', model name for Q-function. It must be eitherS2V_QN_1for structure2vec algorithm orGCN_QN_1for graph_convolunional network algortihm. -
--ngames, type=int, default='500': number of games to simulate per epochs (each game is played 5 times). -
--niter, type=int, default='1000', max number of iterations per game if the algorithm doesn't reach the terminal step. -
--epoch, type=int, default=25, number of epochs. -
--lr,type=float, default=1e-4, learning rate. -
--bs,type=int,default=32, minibatch size for training. -
--n_step,type=int, default=3, n step in RL. -
--node, type=int, default=20, number of node in generated graphs -
--p,default=0.14, p, parameter in graph degree distribution (see networkx help). -
--m, default=4,m, parameter in graph degree distribution, (see networkx help). -
--batch, type=int, default=None, batch run several agent at the same time.
Define the graph object, espacially the kind of degree distribution and the methods.
This script calls each step of reinforcement learning part in a loop (epochs + games):
observe: get states features of the problem (environment class)act: take an action from the last observation (agent class)- get
rewardanddoneinformation from the last action (environment class) - perform a learning step with last observation, last action, observation and reward (
agent class)
Define the agent object and methods needed in deep Q-learning algorithm. There are a lot of paramters quite important defined in this part. The discount factor for exploration strategy, the T iterations for structure2vec, ....
Define the Q-function and the embedding algorithm. S2V_QN_1 and GCN_QN_1 gives good results.
Define the environment object which is either MVC (Minimum vertex cover) or MAXCUT (Maximum cut set). It contains as well the method to get the approximation solution and the optimal solution (with pulp)