This is a ros2_control hardware interface wrapping the rm_motors_can library, used to control DJI RoboMaster motors over the CAN bus.
|
|
Only one command interface may be designated for each motor. The interface type is linked to the motor mode {voltage: velocity, current: effort}.
| Parameter | Required | Type | Description |
|---|---|---|---|
can_interface |
true | string | Network interface to use e.g. "can0" |
simulate |
false | boolean | For testing without a motor connected |
joint/motor_id |
true | integer | Which motor to use for this joint |
joint/motor_type |
true | string | {"gm6020", "m3508", "m2006"} |
joint/position_offset |
false | double | Set the "zero" position of the motor |
These parameters are set in rm_motors.ros2_control.xacro, not as regular ROS node parameters.
For more information on ROS 2 Control hardware interfaces, check the documentation and examples.
This is a demonstration package which drives a gm6020 motor using a position trajectory controller or simple feed-forward controller.
Thanks to the authors of ros2_control_demos for helpful starter code.
Controller details: joint names, command/state interfaces, PID gains.
Launch controller_manager, robot_state_publisher, joint_state_broadcaster, spawn the controllers, and (optionally) start RViz.
Physical configuration of the joints: pose, size, color, intertia, etc.
Hardware interface description: command/state interfaces, limits (currently non-functional), parameters.
The rm_motors_can Rust library is built in the rm_motors_ros CMakeLists.txt. Corrosion compiles the crate and creates a library target for target_link_library. The build process may seem to stall at 0% but that is normal- the output from cargo build is buffered and only displayed when the build completes. TODO for unknown reasons the rm_motors_can build takes a long time to complete.
Out of the box the motor is configured with ID 0, which is invalid. Use the DIP switches to set the ID and enable the CAN termination resistor if necessary.
This library requires a Linux SocketCAN interface. It was tested using a Raspberry Pi 5 and the Waveshare CAN HAT. Quick start setup:
sudo su
raspi-config # enable SPI
cp 80-can.network /etc/systemd/network/80-can.network
cp 80-can.link /etc/systemd/network/80-can.link
systemctl enable systemd-networkd.service
echo """
dtparam=spi=on
dtoverlay=mcp2515-can1,oscillator=16000000,interrupt=25
dtoverlay=mcp2515-can0,oscillator=16000000,interrupt=23
dtoverlay=spi-bcm2835-overlay
""">> /boot/firmware/config.txt
reboot now
TODO NetworkManager is installed by default but it does not support SocketCAN interfaces and it should not coexist with systemd-networkd.
For debugging, you may want to sudo apt install -y can-utils, which adds useful commands such as candump and cansend.
Connect the red wire to the "H" pin on CAN0, with the black wire going to the "L" pin. If these are the only two hosts on the CAN bus, set the HAT jumper and motor DIP switch to enable the CAN termination resistors. Power the motor with 24VDC 4A.
Beware that the motor reaches temperatures which can soften common 3d-printed materials.
Must have ROS 2 and Rust installed, with rm_motors_hw and rm_motors_example in a colcon workspace. Don't forget to install dependencies with rosdep, and cargo install cargo-expand. The Docker image will do all the setup for you.
The rm_motors_can library has some [simple examples](rm_motors_hw/rm_motors_can/README.md to try.
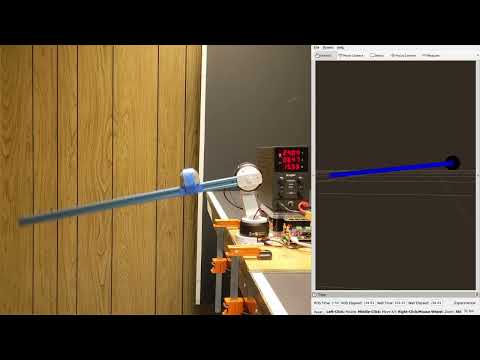
The hardware interface uses the low-level library to communicate to the motor. The trajectory controller commands the hardware interface to move through an arbitrary sequence of positions and velocities. RViz2 visualizes the system.
. install/setup.bash
ros2 launch rm_motors_example rm_motors.launch.py & # don't forget to kill this when you're done
# For joint trajectory controller
ros2 topic pub /joint_trajectory_position_controller/joint_trajectory trajectory_msgs/JointTrajectory "{joint_names: ["joint1"], points: [{positions:[0.0], velocities:[0.0], time_from_start: {sec: 3, nanosec: 0}}]}" -1
# To switch controllers while the system is running:
ros2 service call /controller_manager/switch_controller controller_manager_msgs/srv/SwitchController '{deactivate_controllers: ["joint_trajectory_position_controller"], activate_controllers: ["forward_effort_controller"], strictness: 2}'
# For feed-forward controller
ros2 topic pub /forward_effort_controller/commands std_msgs/msg/Float64MultiArray "{layout:{dim: [], data_offset: 0}, data: [1.0]}" -1
A Docker configuration is provided for ease of setup and deployment. There is also a dev container configuration for use with Visual Studio Code.
git clone https://github.com/mjforan/rm_motors_ros.git
cd rm_motors_ros
git submodule update --init
docker build . -t mjforan/rm-motors-ros -f docker/Dockerfile --build-arg ROS_DISTRO=jazzy
docker run --rm -it --name rm_motors_ros --network host -e ROS_DOMAIN_ID -e RMW_IMPLEMENTATION mjforan/rm-motors-ros