Youtube demo:
- Presentation
- Codes
- Main
- Testing

*This was modified for later use based on code.
- Bluetooth Control:
- Precise movement control.
- Commands sent via bluetooth.
- Commands include: forward, back, left, right, and stop.
- Voice Control:
- Uses advanced Google speech-to-text technology to interpret spoken commands.
- Commands are seamlessly transmitted via Bluetooth.
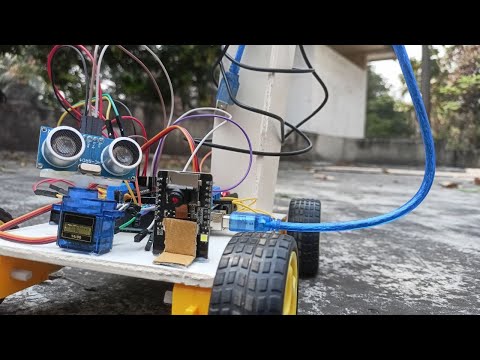
- Obstacle Avoidance:
- Uses a servo motor and an ultrasonic sensor.
- Obstacle detection at 20 cm.
- Iterative process ensures continuous obstacle avoidance.
- Dynamic direction determination to reach destination.
- Can be used for autonomous navigation & maze solving.
- Camera Control:
- Integrates a high-resolution camera with a WiFi module for real-time streaming.
- Enhanced with an LED flashlight.
- Remote surveillance and exploration.
- GPS Control:
- Precise navigation to destination latitude and longitude coordinate.
- Bot is released facing north initially.
- Constantly compares current location to determine route.
- Monitored via Bluetooth.
- Provides status updates including satellite locking and navigation progress.
Example Cases for GPS Control (Current Latitude: 23.726 N, Longitude: 90.3905 E):
- Destination : (23.727 N, 90.3905 E)
- Bot moves north towards the destination.(No turn taken)
- Destination : (23.724 N, 90.3905 E)
- Bot travels south toward the destination.(No turn taken)
- Destination : (23.724 N, 90.38 E)
- Bot initially moves south, then turns left (west) when the latitude matches, and proceeds west to destination.
- Destination : (23.726 N, 90.40 E)
- Bot turns right when the latitude aligns, then advances east to the destination.
- Destination : (23.726 N, 90.3905 E)
- Bot recognizes arrival at the destination and remains stationary.