Udacity Robotics Software Engineer Nanodegree Term 2 Localization Project:
Run the following commands below in separate terminals:
cd /home/workspace/catkin_ws
catkin_make
source devel/setup.bash
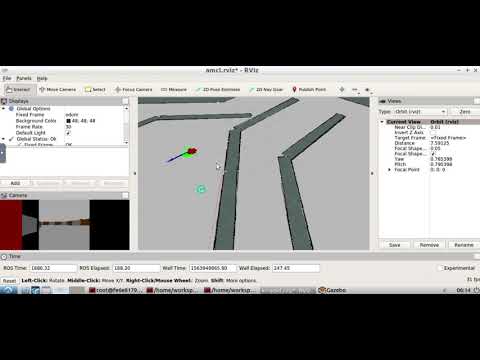
Launch the world in Gazebo and RViz:
cd /home/workspace/catkin_ws/
roslaunch udacity_bot udacity_world.launch
Launch the AMCL node for localization:
roslaunch udacity_bot amcl.launch
Launch Navigation stack
rosrun udacity_bot navigation_goal

| Gazebo | Rviz |
|---|---|
 |
 |
| Rviz | Gazebo |
|---|---|
 |
 |
| Hsin bot | Hsin bot |
|---|---|
 |
 |