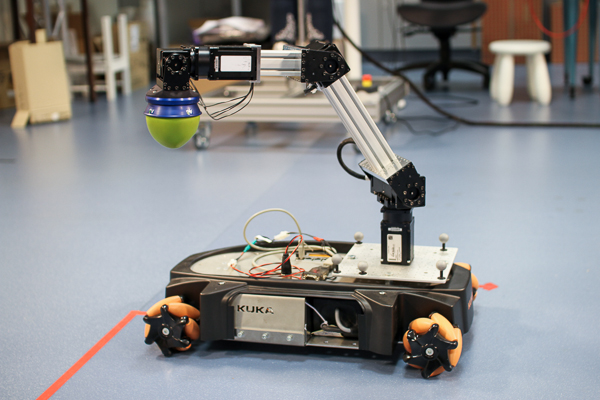
ROS Integration for our Youbot + arm robots.
Launch and configuration files to start the robot in its different versions. Currently, the three main ones are
omnigrasper.launch- arguments
- use_base (bool): enable the Youbot
- use_arm (bool): enable the arm
- use_mocap (bool): launch the node for motion capture integration
- arm_control_mode (string) either velocity, position or safevel
- what it does
- load URDF description the TF tree
- start a control node for the arm (dynamixel hardware interface)
- start a control node for the YouBot mobile base (youbot driver)
- arguments
omni_mocap.launch- starts the ROS node to receive motion capture data on Omnigrasper
velocity_teleop.launch- use a joypad to command the arm, assuming it is in safevel mode
Controllers specifically built for this robot, for instance the omni_controllers/OmnigrasperSpeedSafeController that commande the arm in velocity, ensuring that it never hits the floor or the mobile base.
Has the URDFs of the robot in its different configurations.
Some C++ glu code to command the arm.
| launch/node | required ros packages | other requirements |
|---|---|---|
| omni_mocap | mocap_optitrack |
Work stalled
- Maintainer: Dorian Goepp
- Authors: Federico Allocati, Dorian Goepp