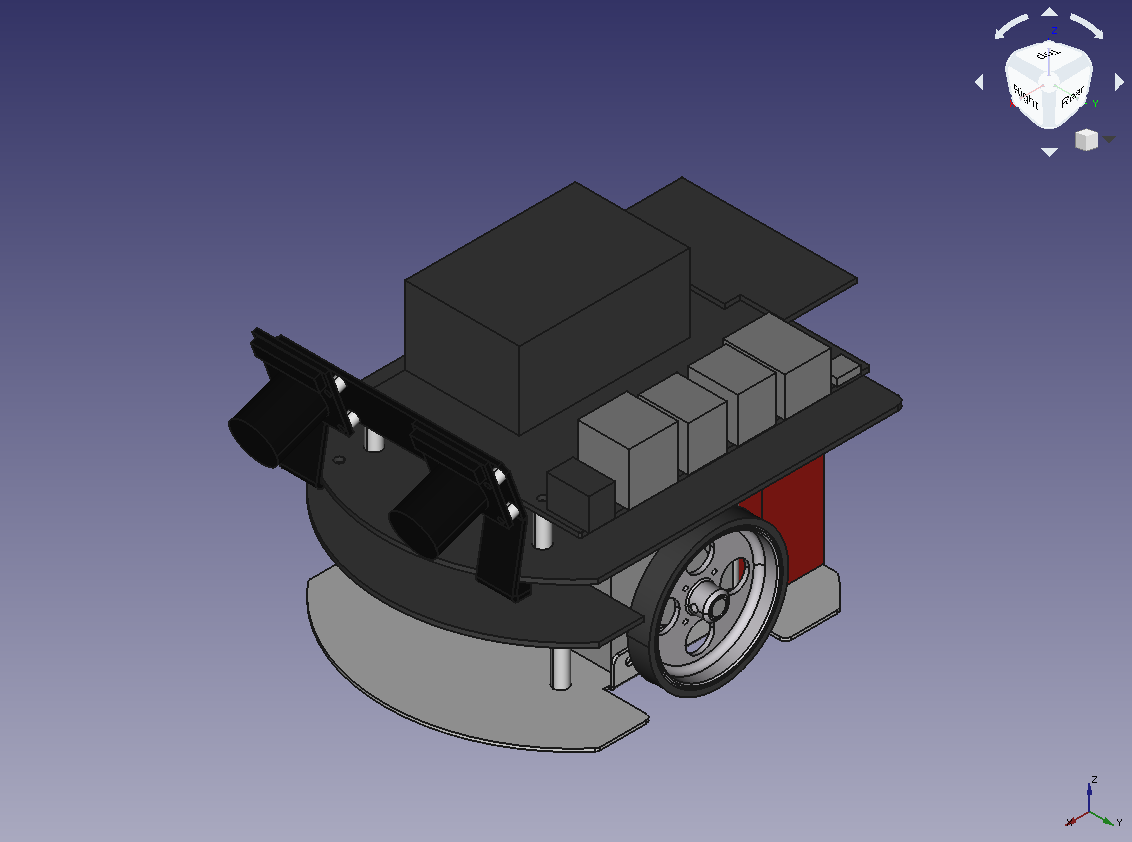
Jetson Nano Mouseのハードウェア情報 / Jetson Nano Mouse – Hardware Information
Jetson Nanoを使った左右独立二輪方式の小型移動プラットフォームロボットのハードウェア情報をまとめたリポジトリです。
公式サイトはこちら(https://rt-net.jp/products/jetson-nano-mouse/)です。
3d_cad_dataディレクトリにはJetson Nano Mouseの3D CADデータが入っています。
circuit_diagramディレクトリにはJetson Nano Mouseの回路図が入っています。
デバイスドライバはrt-net/JetsonNanoMouseのリポジトリで管理されています。
セットアップの際に使用するスクリプトや情報はrt-net/jnmouse_utilsのリポジトリで管理されています。
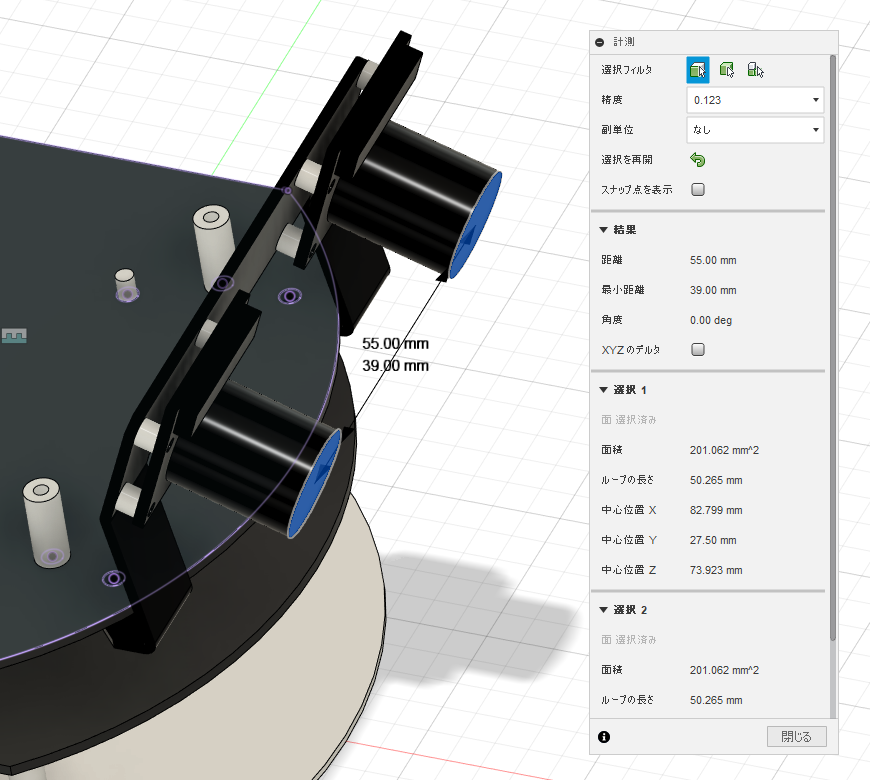
カメラはSainSmart社のIMX219 Camera Module for NVIDIA Jetson Nano Board | 8MP Sensor | 160 Degree FoV (SKU: 101-40-252)を採用しています。
カメラの詳細なスペックについてはSainSmart社のページをご覧ください。
搭載している2つのカメラ同士の距離は55mmとなるように設計されています。
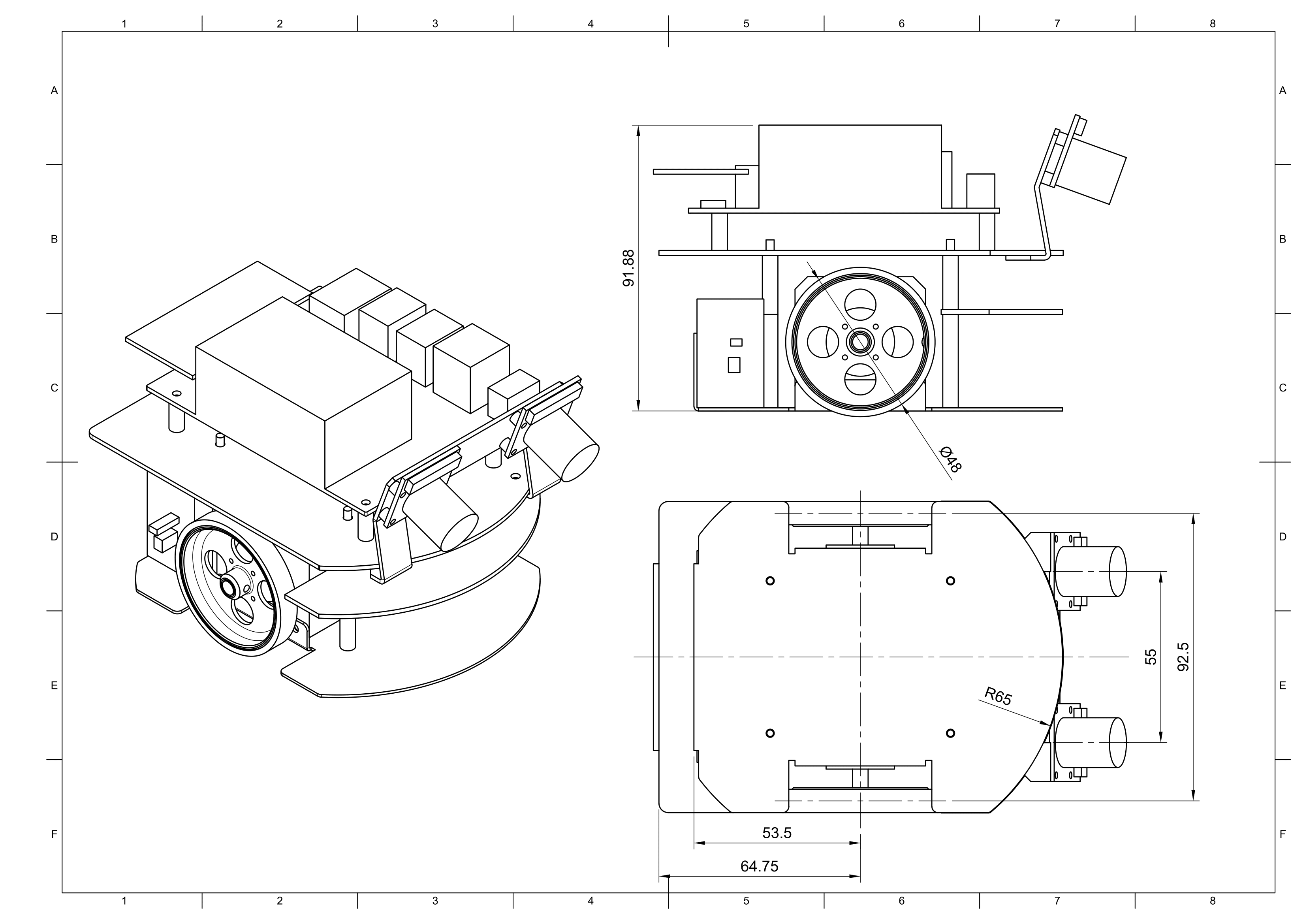
ホイールはRaspberry Pi Mouseと同じ仕様になっています。
- ホイール径: 48mm
- トレッド: 92.5mm
- モータ: 4層ステッピングモータx2
- 基本ステッピング角: 0.9degree
モータについての詳細は製品ページに掲載されている仕様をご覧ください。
本リポジトリはオープンソースですが、開発はオープンではありません。
機能追加については社内のガイドラインを優先します。
誤植や不具合の修正は常時受け付けています。詳しくはコントリビューションガイドラインに従ってください。
(C) 2020 RT Corporation <support@rt-net.jp>
各ファイルはライセンスがファイル中に明記されている場合、そのライセンスに従います。特に明記されていない場合は、Apache License, Version 2.0に基づき公開されています。
ライセンスの全文はLICENSEまたはhttps://www.apache.org/licenses/LICENSE-2.0から確認できます。