Robot Arm Sanitizer (DylanMW and AdamF)
For our project we have decided to use the Agile method as we believe this suits our project better than the waterfall method.
- As we are classed as a small team (2), we feel that this method will work best with our group to ensure we get as much done as possible.
- As we are working with technology we must be ready to change any part of our project at a short moments notice, with this method we are able to ensure that we can be fast and efficient.
This project is going to help us enable our abilities to fight COVID-19. With mass sanitization we feel that we can automate the process with the help of a robot arm! This project aims to automate table cleaning in classrooms.
We will do this with the help of modern technology, a raspberry pi and a robotic arm that has been 3D printed, and with good old trial and error we will get it to how we want the project to work.
To begin our project we came up with our idea of a robot arm that sanitizes tables through a raspberry pi using automation code. We set out to gather as much information as possible that could possibly help us on our journey through our project. We looked for anything that was created before like our idea and possible guides and code that would help us in the future. Once we gathered all this information and research we began to transition into the Design phase.
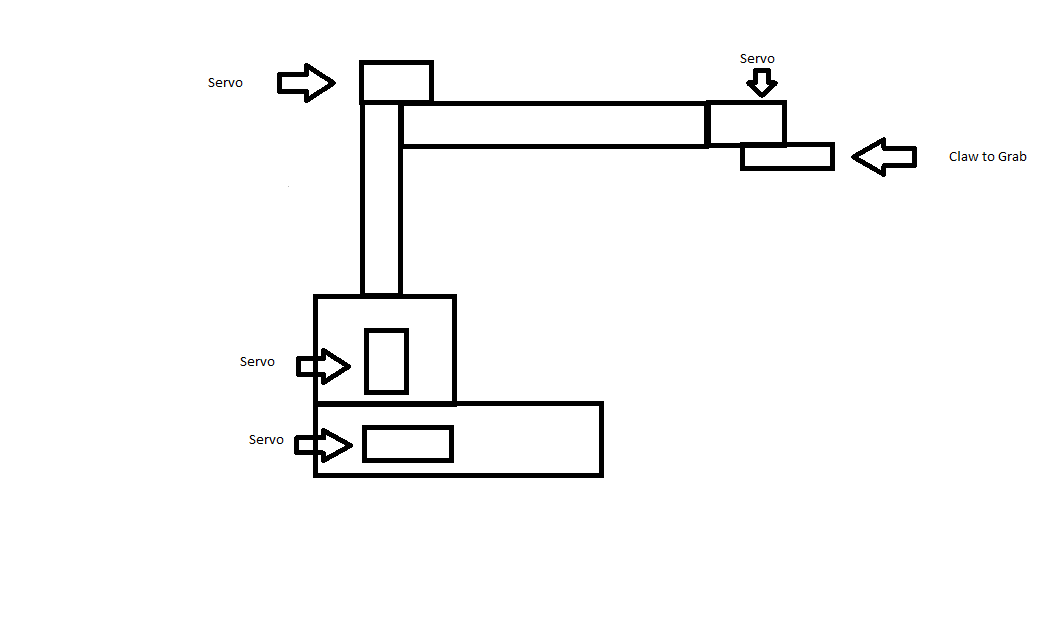
As we began to start the Design Phase, we made sure that we had a clear idea of what we wanted our project to do and how we would get it to do what we wanted. To do this we decided to create a rough sketch of what our project will look like when completed but for now this was a rough guide to help us with what we envisioned.
As we start to actually build our project we made sure that we had everything prepared so that it would go as smoothly as possible, first we obtained a robotic arm and a raspberry pi, these would be the backbone of our project. After successfully connecting our arm and getting some basic code we began to troubleshoot. We used any and everything that we found in the Discovery phase that could help our code. Our code so far is as seen below:
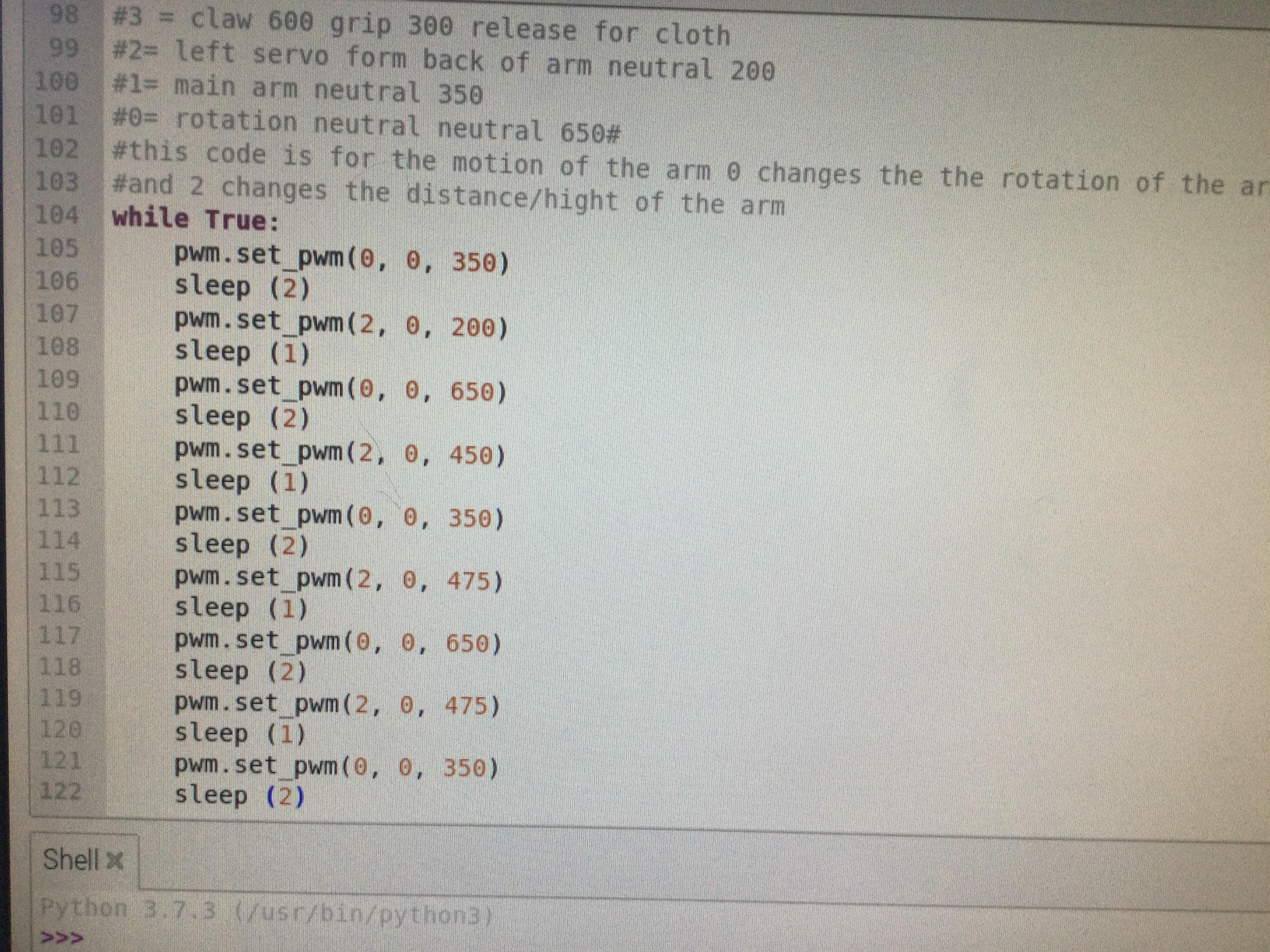
With this code, the arm will move in a endless loop that has a range of motions to ensure that as much area is cleaned as possible. This could be enhanced with some sort of randomization system to ensure that we clean majority of the reach of the arm and not just the same area each time.
- At first, after first hooking up the robotic arm we encountered problems with the packages in thonny which prevented the servos from working.
- After we fixed the first issue we then encountered a second problem which prevented the claw from working correctly and messed up the other servos, to solve this we fully removed the claw and then everything worked perfectly.
- But soon after our robotic arm developed a serious illness. It could not stop twitching and at first we thought that it was a lack of power being provided from the batteries but it turned out to be our own fault as we forgot add a sleep function after the second motion.
- We then encountered a fourth problem which was the result of our own relentless and passionate testing abilities, which led to the premature death of several batteries.
In conclusion over the course of our project we encountered many problems and issues, these of which we overcame through troubleshooting. There is some stuff that we would change if we were to do this project again, such as getting a more suitable arm that fits our needs. The possibility of potentially adding sensors to sense distance to the table. With these sensors the arm would be much easier to work with as it would be able to stop before hitting the table.