This is repository contains the joint controller for the TriPed robot.
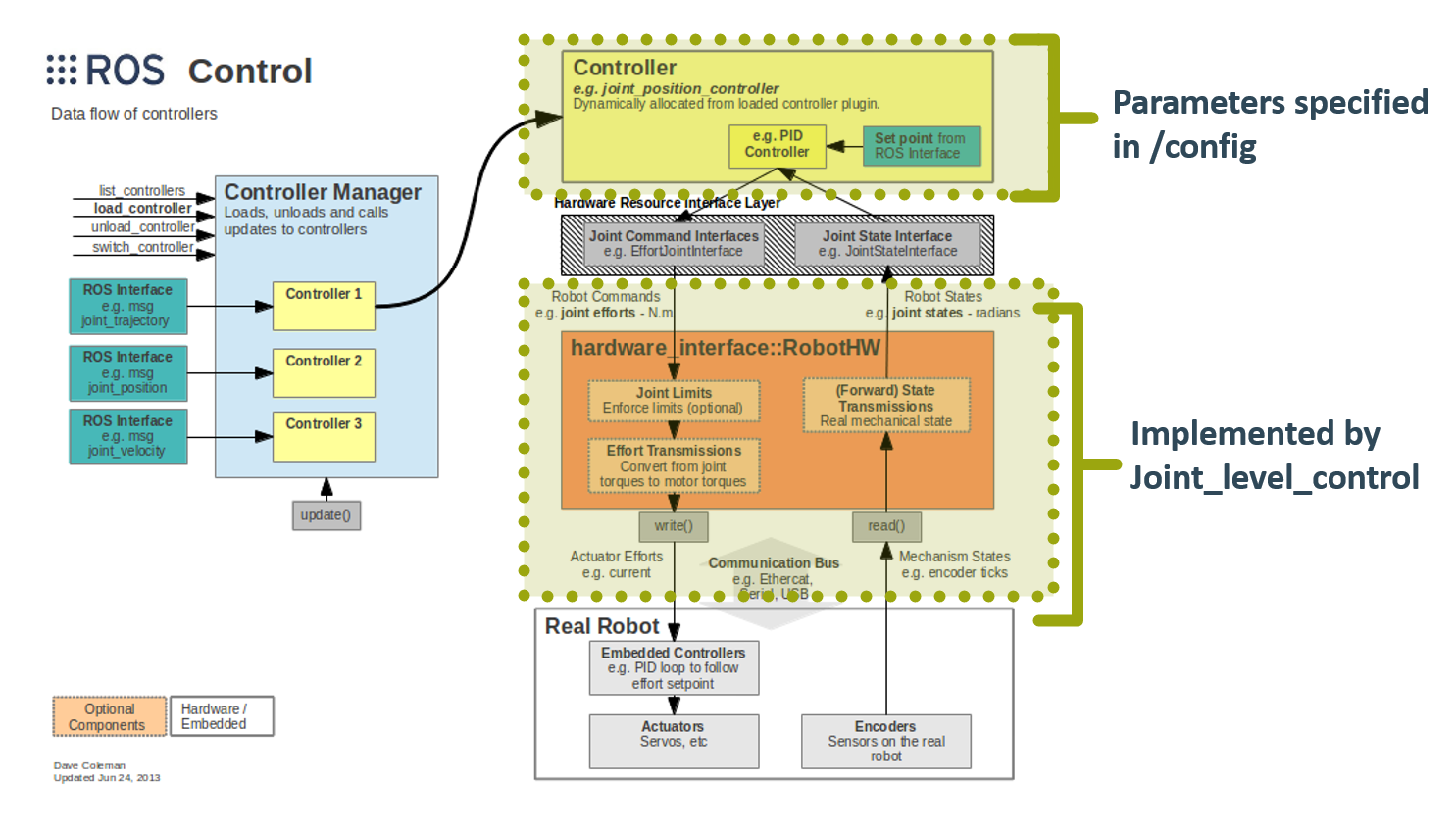
It implements the Hardware Interfaces required by ros_control to interface the joint position and joint space trajectory controllers with the sensors and actuators.
A Diagram of how this package interfaces with ros_Control can be seen here:
 The Documentation of this repository can be seen here.
The Documentation of this repository can be seen here.
-
Notifications
You must be signed in to change notification settings - Fork 0
ROS package to control the joints of the TriPed.
TriPed-Robot/joint_level_control
Folders and files
| Name | Name | Last commit message | Last commit date | |
|---|---|---|---|---|
Repository files navigation
About
ROS package to control the joints of the TriPed.