An educational ROS2 stereo visual odometry system utilizing local bundle adjustment with the g2o library. This project is designed as a learning tool, offering insights into visual odometry and optimization techniques without aiming for high-performance enhancements. Based on concepts discussed in "SLAMBook2 Chapter 13".
- Stereo Visual Odometry: Utilizes stereo camera data to estimate the robot's motion.
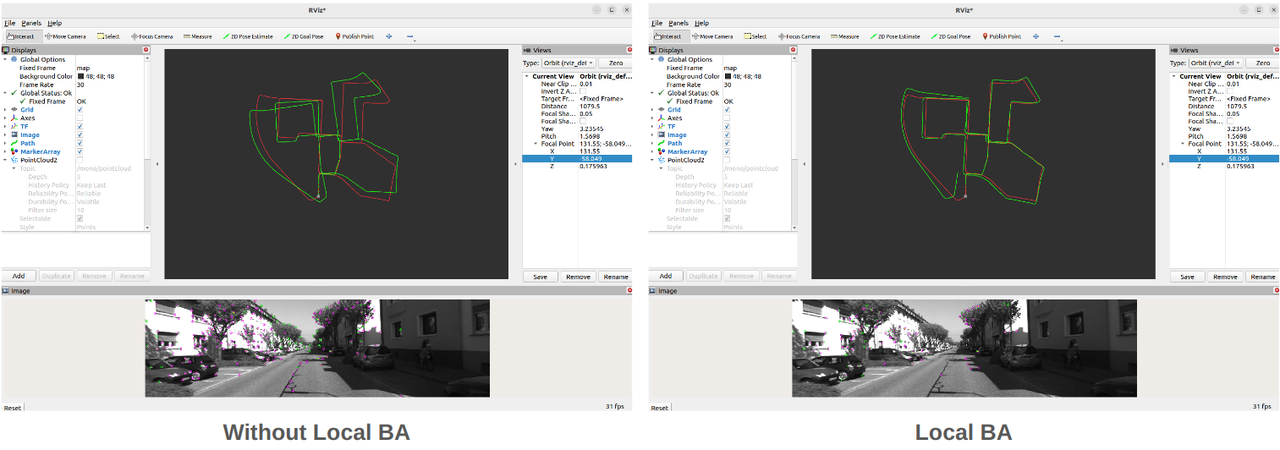
- Local Bundle Adjustment: Employs the g2o library to optimize the positions of keypoints across multiple frames.
- Educational Focus: Designed to provide hands-on experience with visual odometry techniques without the complexity of performance-optimized code.
- ROS2 (Humble or newer)
- g2o
- OpenCV
- Eigen
- Sophus
Launch the stereo visual odometry node using the following ROS2 command:
ros2 launch stereo_visual_slam slam.launch.py