

An API across multiple programming languages to use with the PRUs to load binaries, start/stop, and communicate with the PRUs from the ARM userspace.
An Introductory Video describing the project: https://www.youtube.com/watch?v=3Z2PxDIoCpE&t=5s
An example made using the API: https://www.youtube.com/watch?v=W-Kr37lqM98
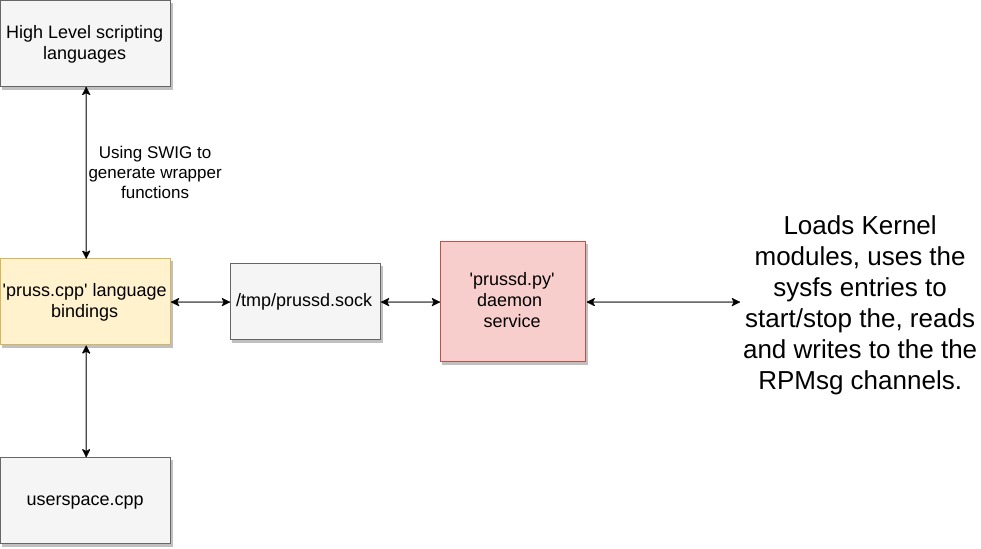
The cpp-bindings interact with the Python Daemon Service through a UNIX Domain Socket file at /tmp/pruss.sock of the Linux file system.
The cpp-bindings passes the appropriate request to the daemon through the socket file. The prussd.py daemon performs the required PRU-related task with root permissions and sends back the return value.
The bindings for other scripting languages can then be built upon the cpp-bindings using SWIG, which takes C++ declarations and creates wrappers needed to access those declarations from other languages. Bindings have also been provided for 'C' language.
cpp-bindings/:
The API which contains the C++ bindings to control the PRUs using prussd.pyprussd/:
The Directory which contains the files related to the daemon which will run as a system service and serve PRU requests. This code does the actual work of controlling the PRUs.examples/:
The Directory which contains the example codes using the bindings. Contains firmware examples as well.example1/: A simple LED Blinky example.example2-rpmsg-pru1/: RPMsg Loopback - simplest RPMsg firmware for testing.example3-pwm/: A PWM generator maximum frequency of about 1MHz.example4-analog-wave-gen/: A PWM generator maximum frequency of about 1MHz.example5-multichannel-pwm/: Multi-channel PWM based on the example given in PRU Cookbook - Accuracy needs to be improved.example6-memory-debug/: To read/write to PRU SRAM/DRAM using /dev/mem and to demonstrate showRegs.example7-stepper-control/: A library to accurately control stepper motors which are driven by the PRU.example8-multiple-assembly-calls/: To demonstrate how to link together multiple .asm files and call them from the C-program. Control is passed back to the C-program by using R3.w2example9-multichannel-waveform-gen/: Expanding example4 to upto 8-channels.
swig:
The Directory which contains the swig config and interface filesDocumentation:
Contains the API Documentation/Specificationinstall.sh:
The install script for the projectdrivers:
A dedicated rpmsg driver for the bindings calledpruss_api
There are two ways for installation:-
- Download the packaged .deb file from releases.
Rundpkg -i pruapi_1.0-1_armhf.deb -
- Clone this repository:
git clone https://github.com/pratimugale/PRUSS-Bindings - Run the install script
cd PRUSS-Bindings/
bash install.sh - The API is now ready to use, run any specific example from
PRUSS-Bindings/examples/firmware_examples/bycd'ing into the directory and runningmake. The Makefile will compile the PRU-firmware, load them on to the PRU(using /lib/firmware), compile the userspace program and run it.
- Clone this repository:
Make sure that RPMsg is working, here's a guide for it.
After installation, this is how a simple userspace program looks like:
#include <iostream>
#include <pruss.h>
using namespace std;
int main()
{
PRUSS& p = PRUSS::get();
PRU p1 = p.pru1;
if(!p1.load("/home/debian/gsoc/PRUSS-Bindings/examples/firmware_examples/example2-rpmsg-pru1/PRU1/am335x-pru1-fw"))
cout << "Firmware loaded\n";
else
return -1;
p1.enable();
string s;
cout << "Enter a message : ";
getline(cin, s);
p1.sendMsg_string(s);
cout << "Message from PRU : "<< p1.getMsg();
p1.disable();
p.shutDown();
return 0;
}If installation is done from the debian package, compile using:
g++ userspace.cpp -L/usr/lib -lpruss
If installed from source, the processor directive must be #include "path/to/cpp-bindings/pruss.h". Run this program by:
g++ userspace.cpp /path/to/cpp-bindings/pruss.cpp -o userspace.o
./userspace.o
HDMI should be disabled. Otherwise this error is encountered:
P9_31 pinmux file not found!
bash: /sys/devices/platform/ocp/ocp*P9_31_pinmux/state: No such file or directory
Cannot write pinmux file: /sys/devices/platform/ocp/ocp*P9_31_pinmux/state
Solution:
sudo vim /boot/uEnv.txt.- uncomment the line
disable_uboot_overlay_video=1
The PRU compiler and linker are already installed on the standard images. They are called clpru and lnkpru.
export PRU_CGT=/usr/share/ti/cgt-prucd $PRU_CGTmkdir -p bincd bin- ln -s which clpru .
- ln -s which lnkpru .
Refer https://zeekhuge.me/post/ptp_blinky/ and https://groups.google.com/forum/#!topic/beagleboard/MBmIm0EnNfc